
マジックハンドを作る実験

動くものが作りたくなりました。Fusion360のアセンブリの習得もかねて、動くものを作ってみました。本当は歯車を組み合わせたあるものを作りたいのですが先に進まない、なのでマジックハンドのおもちゃを作ってみました。あくまでも、自分自身の試行錯誤の記録ですので、表現が雑だったりするのはご容赦くださいませ。
目的と試験方法
目的:Fusion360アセンブリ機能の習得
実験環境: 3Dプリンタ Prusa Mini+
ノズル:0.4mm
ノズル交換時期:2022年3月25日
フィラメント: Overture PLA white
試行1
まず初めに、Googleでマジックハンドっぽいものを探して真似してみました。設計図を頭の中で書いて、それをそのままCADに移します。計算していないので寸法が合わず、です。仕事なら、間違いなくダメ出しをするところです。
かなり手数が多いです。タイトルからわかるとおり、実はすでに4試作目なのです。今週はこちらにかかりきりでした。
実際にアセンブリ機能を使って動かしているのがこちら。
ここで、数値計算をしていなかったので問題が発生。先っぽのものをつかむ部分がかみ合わないのです。
いちおう、先っぽのカギのように泣ている部分の角度が変わらないように設計をしたつもりだったのですが、これでは径の大きなものやタオルといったものしかつかめない、なので設計を変更しました。
試行2
試行1ではものがつかめそうにありませんでしたので、設計変更をかけました。一本一本の棒の長さが長いため、先っぽを平行にするための機構が長くなり、無理があったのだと思いました。また、1作目は薄っぺらかったので、力をかけると簡単に割れそうです。よって、厚みを4mm→8mmに変更しました。
Fusion360のアセンブリ機能を使って動かしたのがこちらです。きちんと先っぽでモノがつかめそうです。
実はこちらの前に一度プリントして壊したものがありました。
こちらは、モノをつかむ部分を平行移動させるための機構(最上段)の厚みを4mmとしています。それほど強度が要らないはずだという理解で薄めにしました。
こちらが実際にプリントしたものです。一体でプリントしました。サポートがさっくりとはがれると思いきや、ブリッジが多いのでその部分を支えるためにいれたサポートが邪魔をして、ばらばらにならず、結局上部が割れて、下の重なった棒部分は外れず、という結果に終わりました。真っ逆さまに落ちる人みたいでかわいいです。(かわいいと表現すべきかどうか)

試行3
すでにプリントを完了し、成功版の半数が実にv17となっていることからもかなりの試行錯誤をしていたことがわかります。
同僚に、この構造は弱いから変えたほうがよいともアドバイスを受けましたが、一度完結させたいということでこの構造のまま進めます。
本当はこちらの構造を参考にしたほうがよかった、ほぼ同時進行なので、もう少し私が遅く始めていたらもうちょっとスマートな構造になったと思います。
2本の棒が重なった部分はこのように接続しています。

実は、これがスライスするとこんな感じでジョイント部分がトップソリッドインフィルにのっかっている感じですので、接続が弱いのです。面倒になって、力をかけたらジョイント部分が吹っ飛びました。

なので、ジョイント部分を太く(5mm→7.5mm)としました。
また、試行2では、上の棒と下の棒の長さが同じでしたので、上の棒のブリッジインフィルが長くなるという問題がありました。おかげで2本の棒が融着して外しにくくなります。
こちらの動画が、試行2のデザインをスライスしたものを下から見たものになります。わかりにくいですが。すみません。
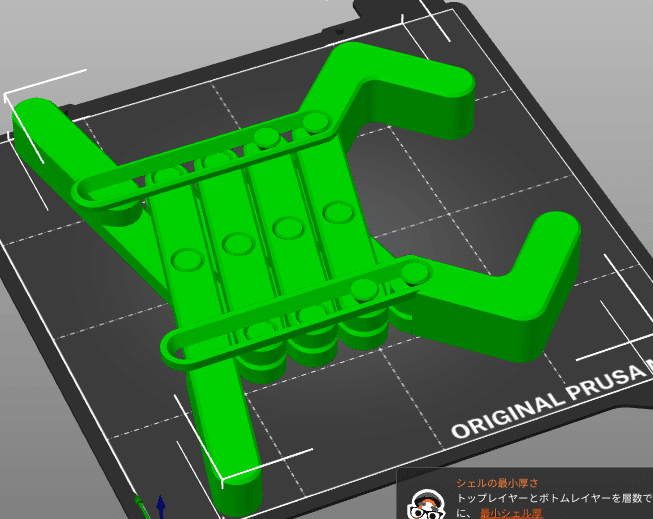
そこで上の棒を下の棒より長くするようにしました。そして、少し開いた状態でプリントすることでブリッジインフィルを短くするようにしました。また、麦茶さんのyoutubeライブで、温度を下げることによりきれいにだしやすくなる(サポートが剥がしやすい)、という説明がありましたので温度を思い切って下げることにしました。first layer:215℃→210℃、その他:215℃→205℃。
スライス結果は以下の通り。
ジョイント部分を太くしたのできちんとしたの棒と融着しそうなことがわかります。
下から見ると、上の棒を支えるサポートが増え、ブリッジの長さが短くなったことがわかります。わかりにくくてすみません。
そしてプリントしたものがこちらです。
サポートもうまく外れました。動画を撮る前に同僚(の息子さん)にプレゼントしてしまいました。雑に扱うと確実に壊れます。
次回は構造も調べて設計したいと思います。

この記事が気に入ったらサポートをしてみませんか?