maxmsp max8 入門 MSP編9 フィルタ1
今回はフィルタを見ていきます。
フィルターとは?
フィルターは、信号の一部の周波数を強調したり抑えたりする機能です。
主なフィルターの種類
• ハイパスフィルター:指定した周波数より低い音をカット。
• ローパスフィルター:指定した周波数より高い音をカット。
• バンドパスフィルター:特定の範囲の周波数だけを通す。
• ノッチフィルター:特定の周波数帯域だけをカット。
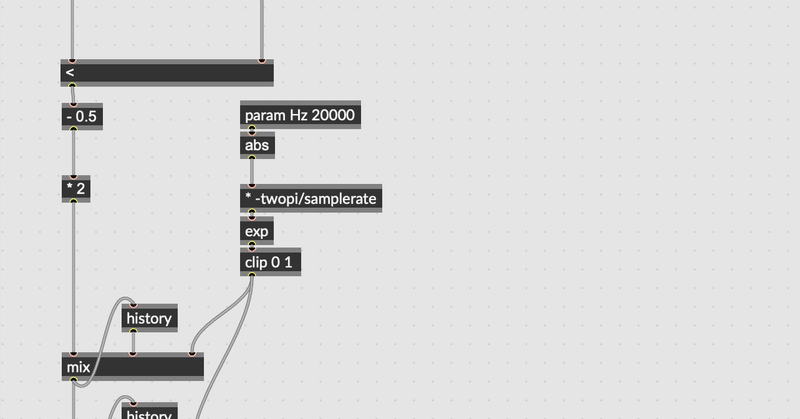
カットオフ周波数:フィルターが効き始める周波数。
Q(品質係数):フィルターの鋭さ。Qが高いと細