
撮像概論

受験勉強のブランクがあるが、記憶の片隅から掘り起こし概論をかく。
現時点の私はこのように撮影と撮像を区別させて頂いている。
撮影は芸術的なもの、撮像は科学的なもの。
けれど、いいものを撮ろう、と努力するように本質は同じなのだと思う。
私は、天文学とクリエイターを結びつけるような取り組みをお仕事にしたいと思っており、両者がもっと融合すれば面白いコンテンツができたり宇宙がもっと身近なものになるかもしれないと考えている。写真撮影に興味があるのはそれが一つの理由である。
これまで眼視で天体観測を嗜むか、デジカメのコリメート撮影をするか、撮像かしかやったことがない。将来は趣味として、プロやアマチュア天文家の方々にも認められるようなデータを撮って自分なりに天文学の研究をやりたいと思っている。

上はとある日の月の写真。(接眼レンズで拡大しコリメート撮影)
前提
ここでは天文学の研究におけるデータの撮像概論を中心に話す。
この撮像概論は主に高校2年生の私が京都大学理学研究科の屋上天文台(一番最初の画像)でデータを撮らせて頂いた経験やその準備のために学校で練習し予習した知識に基づいて作成したものである。あやふやなところもあるかもしれないが、確証が得られる情報のみを選んだつもりである。
また、天文用のCCDカメラとと一般的なカメラは違うところもあるかもしれない。私が学校で使用したカメラは天体観測用に特化して製造されているので構造上、一般的なカメラよりも簡素化された仕組みではあるが、根本的には同じである。
天体写真に挑戦しようと思っている自分はこの経験も参考にしていくつもりである。最後には最近の天文用カメラ事情についても紹介する。
オートガイダーの効果
天球は地球の自転によって1時間に15'' (15°) 回転する。自動追尾(英語ではtracking)は、観測対象となる天体が視野内で動かないように天球の動きに合わせて動くことを意味する。ただし、時間がある程度経つと、赤道儀にも限界があるために多少のズレが起こる。それを防ぐためにオートガイダーがある。
手描きにはなるが、簡単な図をかいてみたのでみて欲しい。
観測装置とは別に望遠鏡の視野の端の明るい星をモニタリングするカメラがオートガイダー(auto guider)であり、天体望遠鏡の多くには設置されている。これを使って星の位置の微小な移動をモニタリングし、天体望遠鏡のズレを補正しながらオートガイディング(auto guiding)観測を行う。
オートガイディングは便利ではあるが、公共の天文台に設置されているような据付の天体望遠鏡で長時間観測を行う場合には、2時間以上連続で観測すると、どうしても少しのズレは生じてしまうと経験上感じている。
可視光撮像観測の手順
1:望遠鏡を観測対象に向け追尾(tracking)状態にする
2:恒星カタログから望遠鏡視野内にある明るい天体を探し、ガイダーを合わせる
3:ガイダーのイメージ(image)を取得し、オードガイディングを始める
4:1〜3の作業と同時並行で、必要があれば装置のフィルターを替える
5:CCDをリセットする。冷却CCDであれば最低でもマイナス摂氏−10度以下を目指し、冷やしていく
7:露光時間の調整を行う。CCDは特に感度が高いので、長すぎるとホワイトアウト(光を取り込みすぎてimageが真っ白になる)する。ここで露光時間をある程度絞る必要がある。地道な作業になる
8:シャッターを開ける
9:一定の時間(正確には積分時間)が終了したところでシャッターを閉じる
10:CCDを読み出してコンピュータに画像を転送する
11:必要があれば1〜3に戻って望遠鏡の視野を微調整する
12:8〜11を数回繰り返す 異なる波長帯で観測する時は4へ戻る
13:バイアス(Bias)やダーク(Dark)などの校正用データを取得する
14:測光観測が目的の場合、最寄りの測光標準星(明るさが精度よく決められている星を選ぶ)に向け追尾状態にする
15:8〜13を数回繰り返す
全ての観測終了後、
16:望遠鏡ドーム内部のスクリーンかドーム全体に一様に光を当て、望遠鏡を通してCCDで数十枚の短い露出をしフラット(Flat)画像を撮る。
17:フラットと同じ露光時間でダークimageを取得する
18:13でダークを取れなかった場合、ここでオブジェクトの露出時間と同じ時間でダークを取得する
19:バイアスを取得するとなお良い
撮像手順の解説
以下で説明する内容は可視光・赤外どちらの検出器でも言えることである。
2018/4/21に撮像したデータを用いて説明する。
オートガイダーで撮像しても一次処理は必須である。RAW dataにはBias・Dark・Flat・Object・Bad pixelあたりの情報が含まれているからだ。
これは前回の記事で見せたRAWデータである。FITSはデータ形式がリッチすぎることから圧縮しているので不鮮明ではあるが、実はこの画像にも沢山のノイズが含まれている。一時処理後の画像も後ほど見せるので是非比較してみて欲しい。

では、一次処理をはじめよう。
Object
天体からの光、この純粋な光を取り出すことこそが一次処理の目指すところである。言い換えると、M3(NGC5272)の光のみを抽出したいということである。
Bias
検出器の0レベルに相当する値でCCDの瞬間瞬間の状態を表すとも言える。CCDの場合、読み出しは一回なのでBiasは回路の状態によってかなり変化し、常に注意を払う必要がある。よって複数回に渡って撮像するのが普通である。Biasは望遠鏡に一切光が入らないようにした状態で0秒積分、つまり露光時間なしで普通にシャッターを切ると取得できる。
Dark
画像に人工的な違和感をもし感じたら星ではなく、Dark補正がなされていないことが多いと思われる。困ったことに慣れるまで正直見分づらい。

上の画像は以前Twitterでお見かけしたある人物の画像である。著作権を考えて撮影対象と思われる箇所にはぼかしをさせて頂いた。その方がなんだか違和感があるような気もするけどな・・と呟いておられた記憶がある。
この写真全体には本当の星ももちろん含まれているし、非常に上手い画像ではある。色調補正がしっかりされ、星雲の美しさが手に取るようにわかる。
しかし、ダーク補正はされていないのであろうというのが正直な感想でもある。
CCDなどの検出器には必ず熱が発生し、検出器中には少しずつ電荷がたまり、暗電流とも呼ばれる。この電荷は、除去する必要がある検出器のノイズでありこれを撮像した画像がDarkフレームなのである。
最近のカメラは凄く、かなりノイズが小さくなったが、長時間真夏の夜空で撮影するとやはりノイズは気になるのではないかと考えている。
冷却CCDで−10℃以上に頑張って冷やしても(CCDの感度が非常に高いこともあるが)ノイズは下のように結構映る。

確かに検出器の向上により現在ではほぼ0に近い値となってはいるが、検出器の温度が長いほど、また露出時間が長いほどノイズは大きくなる。
Darkは望遠鏡に一切光が入らないようにした状態で対象天体を撮像した時間と同じ時間CCDのシャッターを開け複数枚撮像する。つまり、Biasと撮像方法は全く同じである。DarkはBiasを使って校正し、Dark imageを取得するのが基本ではある。ただし、Darkを一定時間ごとに分けて複数回かつ複数枚撮って規格化するならば、Biasは取らなくても良い。
Flat
簡単に言えば、画像全体にかかる白く見える霞や黒い模様である。
熱放射や大気の散乱光と天体(object)の光はどちらも望遠鏡を通ってくる。よってFlat補正をかけて観測システムの特性をなくす必要があるのだ。

ドーム内で観測する場合は望遠鏡ドーム内部に設置されたスクリーンかドーム全体に一様に光を当て、望遠鏡を通してCCDで数十枚の短い露出をしドームフラット(Dome Flat)画像を撮れば良いが、個人の望遠鏡では流石に厳しいケースが多いし、一様な光を当てるのは結構容易ではない。
よって、できるだけ月明かりや街明かり、星の少ない夜空を探し、その領域に望遠鏡を向け数十枚以上、短い露出をして撮る方法を勧める。これが厳しいならば、白いもので鏡筒の口をすっぽり覆いそこに懐中電灯等で一様に光を当てて撮像しよう。
データ一次処理
可視データの大まかな解析手順を示す。
0:Flatの準備・・・観測終了後に取得したFlatは平均し、直後にとったFlat補正用のDarkの平均との差をとり規格化する。Flatの定義を再確認しよう。Flatは、検出器の量子効率を含む観測システム全体の相対的な効率を表したものである。
1:imageの確認・・・天体の写っているRAWデータ状況を確認し、背景や天体の明るさを大まかに知る。
2:Darkを引く・・・天体観測直後に取得したDarkイメージを平均し、RAWデータから引く。この時、Biasも同時に引かれている。ただし、全ての観測終了後にのみDarkを撮った時は各時間帯で撮ったBiasでDarkを補正しなければならない。
3:Flat で割る・・・0:で準備したFlatを2:で得たデータからさらに割って補正する。ここでBad Pixel があれば周囲のpixelの値を用いて補間する。
これらの作業により、ようやくObjectフレームが得られる。さらに上の手順で処理された同じ時間帯に同じフィルターで連続数百枚撮像したObjectフレームをコンポジット合成する。数百枚となると天体の位置は微妙にずれているかもしれないので画像内の星を1つ任意に選んで基準とし、その星を合わせることによって全体も合わせて一枚の画像へと合成していく。
一時処理を無事終え、下の画像ができた(GIMPで表示)。
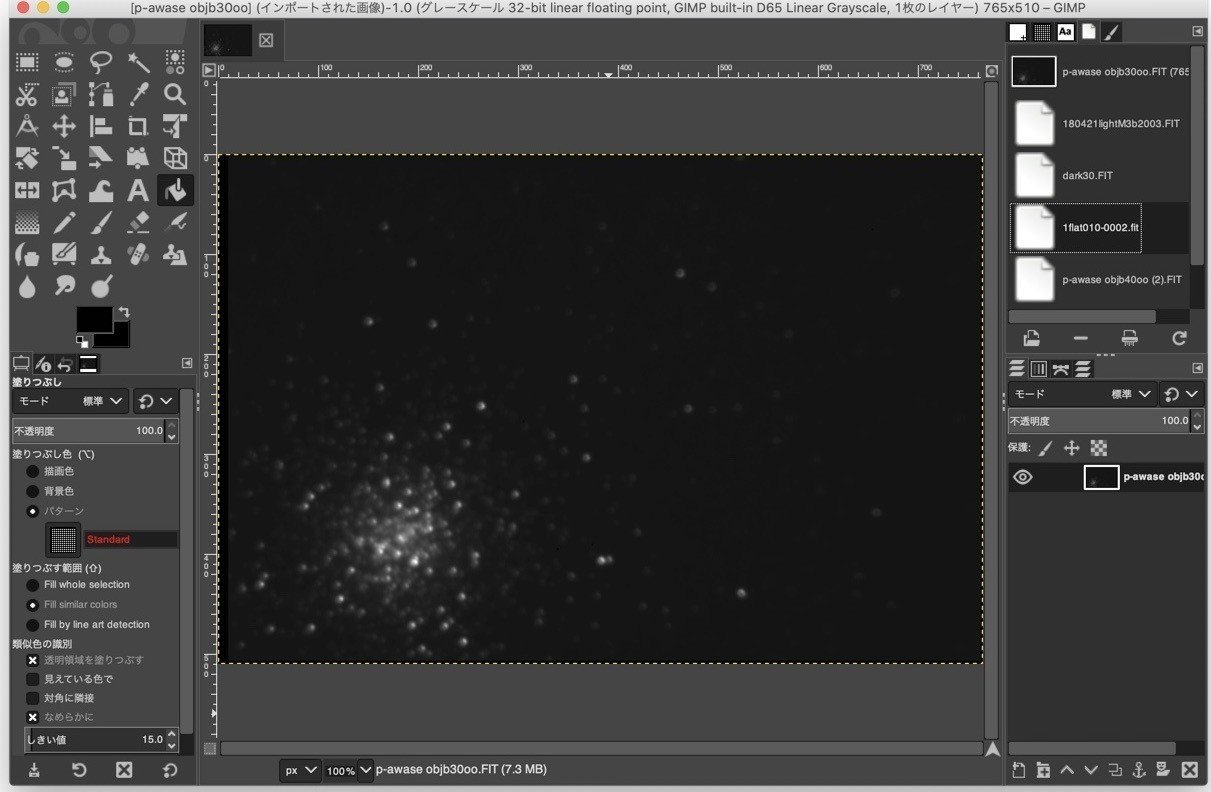
ノイズは消え、オブジェクトの光のみほぼ抽出できていることが分かる。
このような過程を経て真に美しいデータが得られるのである。
なお、このM3の画像はIRAFというアメリカ国立光学天文台のプログラマーによって書かれた解析ソフトを用いて一次処理を行っている。
残念ながらIRAFを新たにダウンロードして使うのは基本的におすすめできない。IRAFは2013年以降メンテナンスされていない。そのため、IRAFにはバグやセキュリティ上の問題点も存在しており、2018年からは配布方法さえ変わってしまったようだ。
Macでも使えたんだけどなー。。。
残念。
おまけ)IRAFの話はいつか記事になるかもしれない
最新の天文用カメラ事情
天体観測で高度な観測・記録を目的としているアマチュア天文家などは冷却CCD/COMSを導入されていることがほとんどだと思う。観測用に特化しているので、構造的には一般的なカメラよりも無駄がない分、素子自身の実力が発揮されやすいとみられる。
なぜ優れているのに一般的に普及していなかったのか・・・それは
価格が高すぎるから。
元々、CCDはアメリカのベル研究所で開発されたと聞いたことがあるが、天文用のCCDは一部の層がターゲットの製品だったため本格的になると100万円以上の値段がするものも珍しくない。
それが最近ではメーカーの増加により競争化が始まり、天文台が使用するような超高性能のものから初心者でも手に取れる価格帯(1〜3万円台)のものまで登場して、バリエーションが豊かになり、ビギナーにより身近になってきた感触がある。
また、以前はCCDよりもCMOSの方が安価ながら性能は劣る傾向にあり、CCDが先行して長年主流となっていたが、近年は、CMOSがCCDより劣っていたノイズ低減、感度、耐久性に関して飛躍的な向上を遂げ、さらには高速化需要の流れにより、ほとんどの産業用カメラにCMOSが使われるようになっている。
天体観測においてもこの流れは例外ではない。例えば、東京大学の木曽研究所がCMOSカメラの採用・開発について検討されているのをウェブページに公開されている資料から知ったこともある。
以下の表はSONYのサイトで掲載されていたものである。

4大メーカー
天体用CCD・CMOSの有力メーカーは、主に4つ。
最近、勢いを見せているZMOptical・・・コスパがよく日本にも愛好者の多い中国メーカー。世界で最初に惑星用CMOSカメラ「ASI130MM」を製造。
先駆者SBIG・・・冷却カメラ中心に絶対的な人気を誇るメーカー。このメーカーのCCDカメラは多くの天文台でみてきた。最近はオートガイド機能を持ったカメラなどユニークな製品もあるらしい。
国内の天体観測用の冷却CCDといえばBITRAN・・・その実力は実証済み。ハイアマチュア向けから天文台レベルの運用にも対応した高性能なモデルを各種発売している。
来日してきた実力者QHY・・・ヨーロッパでは既に大きなシェアを獲得しているが日本にも正式に上陸し、早くもその実力はお墨付き。またフルサイズCMOSを採用したモデルでは群を抜いていると評判である。
大体このような感じの紹介である。やはり、CCDに限界が見えてきた中、CMOSの進化に大きな注目が高まっているのは事実であろう。
実際私もCCDは大好きだが、CMOSに切り替える時がきたとも感じている。
撮像概論は以上です。最後までお読み頂きありがとうございました。5月中はこれ以上更新できないと思いますが、また6月はよろしくお願いします。このことに関してコメント欄などで質問して頂ければ頑張って答えるつもりでおります。また、フォローしていただければ幸いです。
それでは今日も綺麗な夜空が見えますように
この記事が参加している募集
この記事が気に入ったらサポートをしてみませんか?