Raspberry Pi PicoでPythonのお勉強 ~8~

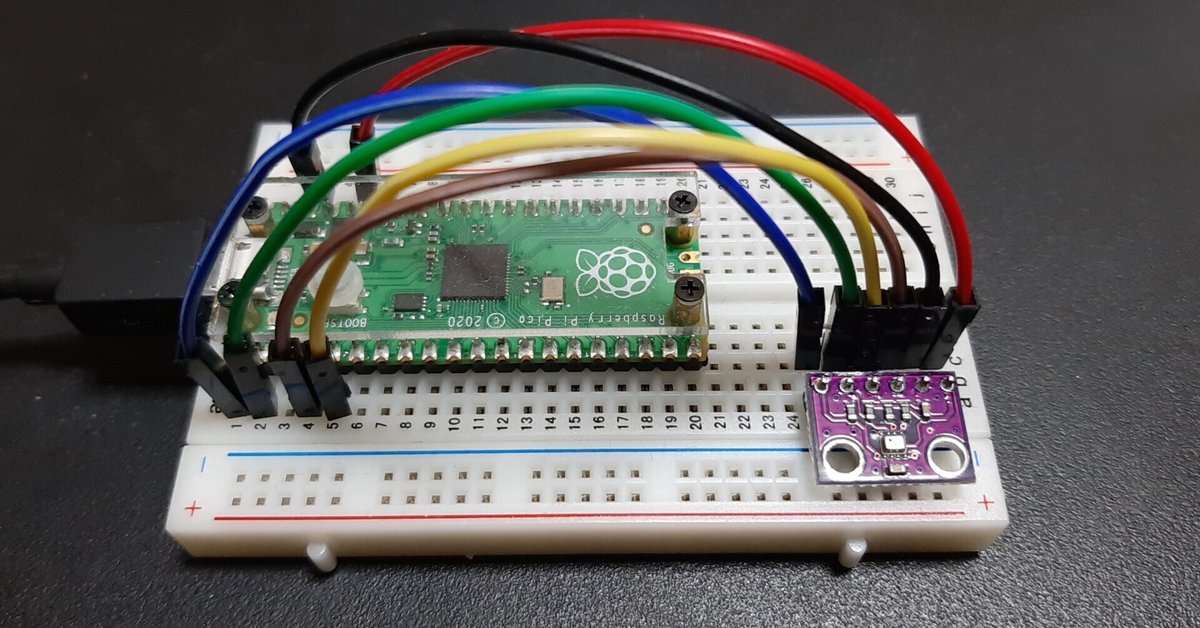
前回MicroPythonでBMP280とSPI通信できることが確認できたので、元々I2C用だったライブラリをSPI用に改造して動作させました。
作成したコードは下記になります
from machine import Pin, SPI
from time import sleep
from bme280_spi import BME280
cs = Pin(1, mode=Pin.OUT, value=1)
spi = SPI(0, baudrate=100000, polarity=0, phase=0, sck=Pin(2), mosi=Pin(3), miso=Pin(0))
bme = BME280(spi = spi, cs = cs)
print(bme.values)
import time
from ustruct import unpack, unpack_from
from array import array
# Operating Modes
BME280_OSAMPLE_1 = 1
BME280_OSAMPLE_2 = 2
BME280_OSAMPLE_4 = 3
BME280_OSAMPLE_8 = 4
BME280_OSAMPLE_16 = 5
BME280_REGISTER_CONTROL_HUM = 0x72
BME280_REGISTER_CONTROL = 0x74
class BME280:
def __init__(self,
mode=BME280_OSAMPLE_1,
spi=None,
cs=None,
**kwargs):
# Check that mode is valid.
if mode not in [BME280_OSAMPLE_1, BME280_OSAMPLE_2, BME280_OSAMPLE_4,
BME280_OSAMPLE_8, BME280_OSAMPLE_16]:
raise ValueError(
'Unexpected mode value {0}. Set mode to one of '
'BME280_ULTRALOWPOWER, BME280_STANDARD, BME280_HIGHRES, or '
'BME280_ULTRAHIGHRES'.format(mode))
self._mode = mode
if spi is None:
raise ValueError('An SPI object is required.')
self.spi = spi
if cs is None:
raise ValueError('An CS object is required.')
self.cs = cs
# load calibration data
try:
self.cs(0)
dig_88_a1_temp = self.spi.read(27, 0x88)
finally:
self.cs(1)
dig_88_a1 = dig_88_a1_temp[-26:]
try:
self.cs(0)
dig_e1_e7_temp = self.spi.read(8, 0xE1)
finally:
self.cs(1)
dig_e1_e7 = dig_e1_e7_temp[-7:]
self.dig_T1, self.dig_T2, self.dig_T3, self.dig_P1, \
self.dig_P2, self.dig_P3, self.dig_P4, self.dig_P5, \
self.dig_P6, self.dig_P7, self.dig_P8, self.dig_P9, \
_, self.dig_H1 = unpack("<HhhHhhhhhhhhBB", dig_88_a1)
self.dig_H2, self.dig_H3 = unpack("<hB", dig_e1_e7)
e4_sign = unpack_from("<b", dig_e1_e7, 3)[0]
self.dig_H4 = (e4_sign << 4) | (dig_e1_e7[4] & 0xF)
e6_sign = unpack_from("<b", dig_e1_e7, 5)[0]
self.dig_H5 = (e6_sign << 4) | (dig_e1_e7[4] >> 4)
self.dig_H6 = unpack_from("<b", dig_e1_e7, 6)[0]
write_data = BME280_REGISTER_CONTROL.to_bytes(1, 'big')
write_data = write_data + b"\x3f"
try:
self.cs(0)
self.spi.write(write_data)
finally:
self.cs(1)
self.t_fine = 0
# temporary data holders which stay allocated
self._l1_barray = bytearray(1)
self._l8_barray = bytearray(8)
self._l3_resultarray = array("i", [0, 0, 0])
def read_raw_data(self, result):
""" Reads the raw (uncompensated) data from the sensor.
Args:
result: array of length 3 or alike where the result will be
stored, in temperature, pressure, humidity order
Returns:
None
"""
self._l1_barray[0] = self._mode
write_data = BME280_REGISTER_CONTROL_HUM.to_bytes(1, 'big')
write_data = write_data + bytes(self._l1_barray[0])
try:
self.cs(0)
self.spi.write(write_data)
finally:
self.cs(1)
self._l1_barray[0] = self._mode << 5 | self._mode << 2 | 1
write_data = BME280_REGISTER_CONTROL.to_bytes(1, 'big')
write_data = write_data + bytes(self._l1_barray[0])
try:
self.cs(0)
self.spi.write(write_data)
finally:
self.cs(1)
sleep_time = 1250 + 2300 * (1 << self._mode)
sleep_time = sleep_time + 2300 * (1 << self._mode) + 575
sleep_time = sleep_time + 2300 * (1 << self._mode) + 575
time.sleep_us(sleep_time) # Wait the required time
# burst readout from 0xF7 to 0xFE, recommended by datasheet
try:
self.cs(0)
dig_f7_fe_temp = self.spi.read(9, 0xF7)
finally:
self.cs(1)
dig_f7_fe = dig_f7_fe_temp[-8:]
self._l8_barray = bytearray(dig_f7_fe)
readout = self._l8_barray
# pressure(0xF7): ((msb << 16) | (lsb << 8) | xlsb) >> 4
raw_press = ((readout[0] << 16) | (readout[1] << 8) | readout[2]) >> 4
# temperature(0xFA): ((msb << 16) | (lsb << 8) | xlsb) >> 4
raw_temp = ((readout[3] << 16) | (readout[4] << 8) | readout[5]) >> 4
# humidity(0xFD): (msb << 8) | lsb
raw_hum = (readout[6] << 8) | readout[7]
result[0] = raw_temp
result[1] = raw_press
result[2] = raw_hum
def read_compensated_data(self, result=None):
""" Reads the data from the sensor and returns the compensated data.
Args:
result: array of length 3 or alike where the result will be
stored, in temperature, pressure, humidity order. You may use
this to read out the sensor without allocating heap memory
Returns:
array with temperature, pressure, humidity. Will be the one from
the result parameter if not None
"""
self.read_raw_data(self._l3_resultarray)
raw_temp, raw_press, raw_hum = self._l3_resultarray
# temperature
var1 = ((raw_temp >> 3) - (self.dig_T1 << 1)) * (self.dig_T2 >> 11)
var2 = (((((raw_temp >> 4) - self.dig_T1) *
((raw_temp >> 4) - self.dig_T1)) >> 12) * self.dig_T3) >> 14
self.t_fine = var1 + var2
temp = (self.t_fine * 5 + 128) >> 8
# pressure
var1 = self.t_fine - 128000
var2 = var1 * var1 * self.dig_P6
var2 = var2 + ((var1 * self.dig_P5) << 17)
var2 = var2 + (self.dig_P4 << 35)
var1 = (((var1 * var1 * self.dig_P3) >> 8) +
((var1 * self.dig_P2) << 12))
var1 = (((1 << 47) + var1) * self.dig_P1) >> 33
if var1 == 0:
pressure = 0
else:
p = 1048576 - raw_press
p = (((p << 31) - var2) * 3125) // var1
var1 = (self.dig_P9 * (p >> 13) * (p >> 13)) >> 25
var2 = (self.dig_P8 * p) >> 19
pressure = ((p + var1 + var2) >> 8) + (self.dig_P7 << 4)
# humidity
h = self.t_fine - 76800
h = (((((raw_hum << 14) - (self.dig_H4 << 20) -
(self.dig_H5 * h)) + 16384)
>> 15) * (((((((h * self.dig_H6) >> 10) *
(((h * self.dig_H3) >> 11) + 32768)) >> 10) +
2097152) * self.dig_H2 + 8192) >> 14))
h = h - (((((h >> 15) * (h >> 15)) >> 7) * self.dig_H1) >> 4)
h = 0 if h < 0 else h
h = 419430400 if h > 419430400 else h
humidity = h >> 12
if result:
result[0] = temp
result[1] = pressure
result[2] = humidity
return result
return array("i", (temp, pressure, humidity))
@property
def values(self):
""" human readable values """
t, p, h = self.read_compensated_data()
p = p // 256
pi = p // 100
pd = p - pi * 100
hi = h // 1024
hd = h * 100 // 1024 - hi * 100
return ("{}C".format(t / 100), "{}.{:02d}hPa".format(pi, pd),
"{}.{:02d}%".format(hi, hd))
上のコードをそれぞれbmetest_spi.py、bme280_spi.pyというファイル名で保存してRaspberry Pi Picoに送り、Thonny上でbmetest_spi.pyを実行したところI2C接続の時と同様に温度と気圧のデータが表示されました。
ではコードの解説に入ります。bmetest_spi.pyではI2Cの時と同様にBMP280へのアクセスをライブラリ化しているので、SPIで使う信号の設定だけしています。今回SPI関連の信号はSPIクラスに加えてCS信号の制御も必要なので、CSとSPIクラスの設定をしてそれぞれをBME280のライブラリへ渡すようにしています。bmetest_spi.pyで行っているのはそれだけです。
次にbme280_spi.pyですが、こちらはいろいろと変更が必要でした。最初に13行目のレジスタアドレスですが、こちらの変数はSPIのWRITEでしか使わないのでSPIのWRITEに合わせて値を変えました。BMP280ではSPIアクセス時READではアドレスの最上位ビットを"1"、WRITEではアドレスの最上位ビットを"0"にして送るようになっているので、I2Cの時と比べてアドレスの最上位ビットを"0"に変更しました。
21,22行目ではbmetest_spi.pyからCSとSPIのオブジェクトを受け取るために変更しています。同様にI2Cオブジェクトのチェックを行っていた部分を32~37行目のように変更しました。
次に40行目ですが、ここが最初に出てくるSPIアクセスの記述になります。
try:
self.cs(0)
dig_88_a1_temp = self.spi.read(27, 0x88)
finally:
self.cs(1)
dig_88_a1 = dig_88_a1_temp[-26:]ちなみにI2Cアクセスの時は下記のコードでした。
dig_88_a1 = self.i2c.readfrom_mem(self.address, 0x88, 26)I2Cアクセスの時は1行で済みましたが、SPIではやることが増えています。まず最初にBMP280のCSピンをLowに設定しなければならないので、CS(0)としてからspi.read()のメソッドを使います。そしてspi.read()が終了してからCSピンをHighに設定するためにCS(1)としています。
ここで一つSPIが面倒なのは、I2Cでは読み出しバイト数を26としているのにSPIでは27バイトにしなければならない点です。これはSPIの仕様上0x88のアドレスを書くと同時に読出しも始まってしまうので、読出し時は必ず読出しデータの先頭に無駄な1バイトが付いてきます。なので、必要なデータ数+1のバイト数で読み出して、先頭の1バイトを捨てるという処理が必要になります。
47行目も同様にSPIのREADの記述になります。
次に変更したのは68行目からの部分になり、こちらはSPI WRITEの記述になります。
write_data = BME280_REGISTER_CONTROL.to_bytes(1, 'big')
write_data = write_data + b"\x3f"
try:
self.cs(0)
self.spi.write(write_data)
finally:
self.cs(1)ちなみにI2Cアクセスの時は下記のコードでした。
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL,
bytearray([0x3F]))CSピンの制御をしなければならないのは、SPI READの時と同じです。spi.write(write_data)のwrite_dataはbytes型でなければならないので、レジスタアドレスをbytes型に変換してから0x3Fのデータを追加しています。bytes型にデータを追加するには"+"でいいようです。
93行目からの部分も同じSPI WRITEの記述ですが、こちらはbytearray型のデータを書きこみたいのでbytes型に変換するという一手間が必要になっています。
self._l1_barray[0] = self._mode
write_data = BME280_REGISTER_CONTROL_HUM.to_bytes(1, 'big')
write_data = write_data + bytes(self._l1_barray[0])
try:
self.cs(0)
self.spi.write(write_data)
finally:
self.cs(1)102行目からの記述も同様ですが、これらのbytearray型とbytes型の相互変換は意外と面倒ですね。
以上がI2CアクセスのライブラリをSPIアクセスに変更した内容になります。
コード作成の途中でcsとspiオブジェクトをself.cs、self.spiとしなかったことでハマりましたが、何とかI2CアクセスのライブラリをSPIアクセスに変更することができました。
これでMicroPythonを使ったI2C/SPIアクセス方法が分かったので、今後BMP280(BME280)以外のデバイスを使うことになっても大丈夫な気がしてきました。
「Raspberry Pi PicoでPythonのお勉強」シリーズはこれで終了になります。またMicroPythonやRaspberry Pi Picoで何かやりたくなったらNoteで発信することにします。