米ハーバード大学、局所的にボディ剛性を持つソフトロボットアームを開発

2023年8月30日、米ハーバード大学の研究グループは、柔軟性を維持しながらより大きな可搬重量を可能にする、局所的にボディ剛性を持つソフトロボットアームを開発し、研究成果を「Science Robotics」誌に発表した。
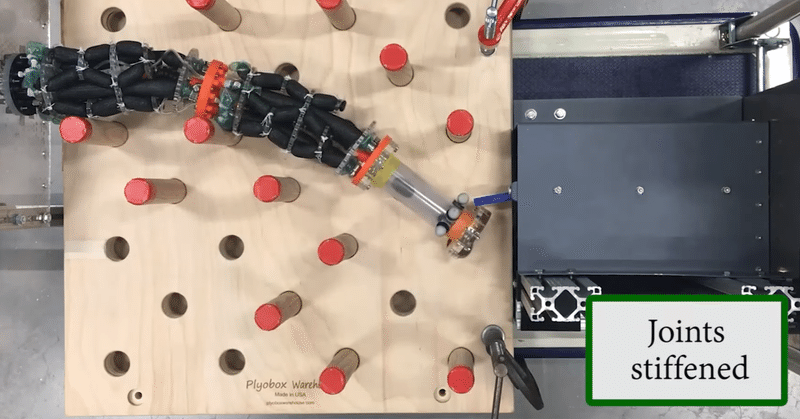
現在のソフトロボットは、タスクに適応するために受動的なコンプライアンスを使用しており、デリケートな物体を扱ったり、必要に応じてフォームを調整したりすることができる。しかし、このコンプライアンスでは可搬重量が制限されてしまう。これに対処するため、研究者らは、動作中にロボットのコンプライアンスを能動的に調整できる可変剛性アクチュエータ(VSA)を組み込んだ。レバーアームやバネ機構、形状記憶材料、温度依存性コンポーネントによって実現されるこの局所的な剛性向上は、より高速で安全な動作制御を可能にするとしている。
可変剛性という概念は、自然界でも観察されており、例えばナマコは保護のために必要なときに体を硬くする。ハーバード大学の研究は、障害物の多い環境をナビゲートし、人間やデリケートな物体と安全に相互作用する能力を維持しながら、より大きなペイロードを扱うことができる、より高性能なロボットアームの創造を目指している。
出典:
2023年8月30日発行 Science Robotics (英語)
“Increasing the payload capacity of soft robot arms by localized stiffening”
https://www.science.org/doi/10.1126/scirobotics.adf9001
2023年9月5日付 TechXplore(英語)
https://techxplore.com/news/2023-09-stiffening-yields-efficient-soft-robot.html