第2話「中身 後編その1」

前回はこちらから
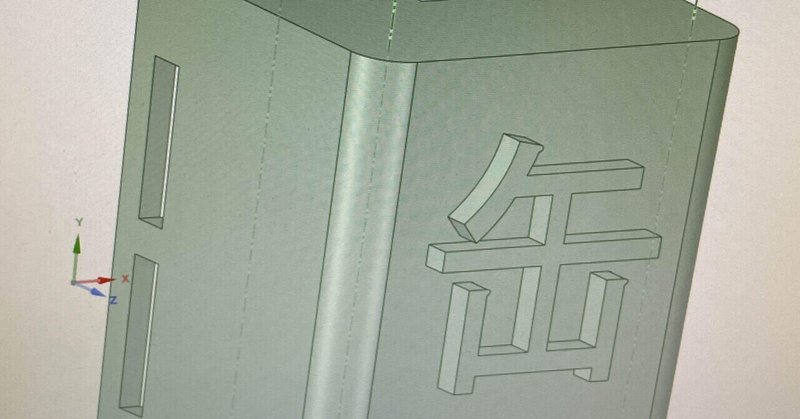
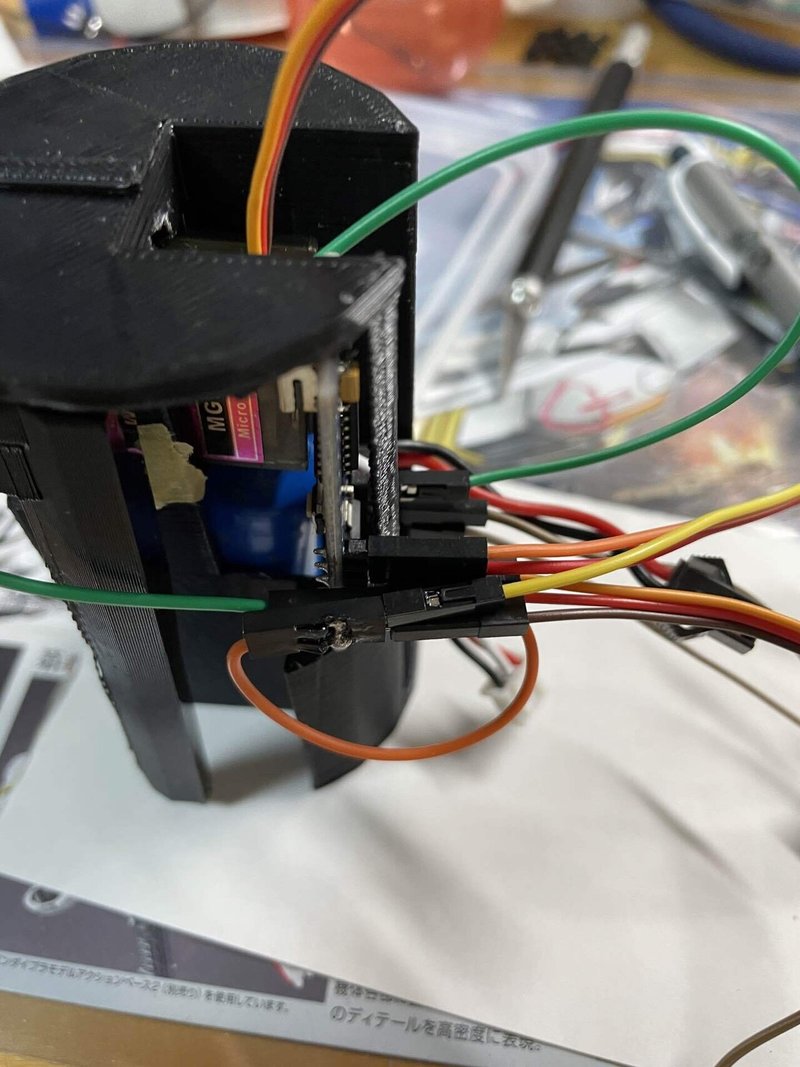
結論を述べると、これ
見てわかる通り、外装に穴を開けてArduinoを外に露出させている。
なぜこうなったかと言うと、はんだ付けをした後、回路を組んだ後に、円柱の中に入りきれていない。という事件が起きてしまいこのような結果となった。
はんだ付けをした部品については、下の画像を見て欲しい。
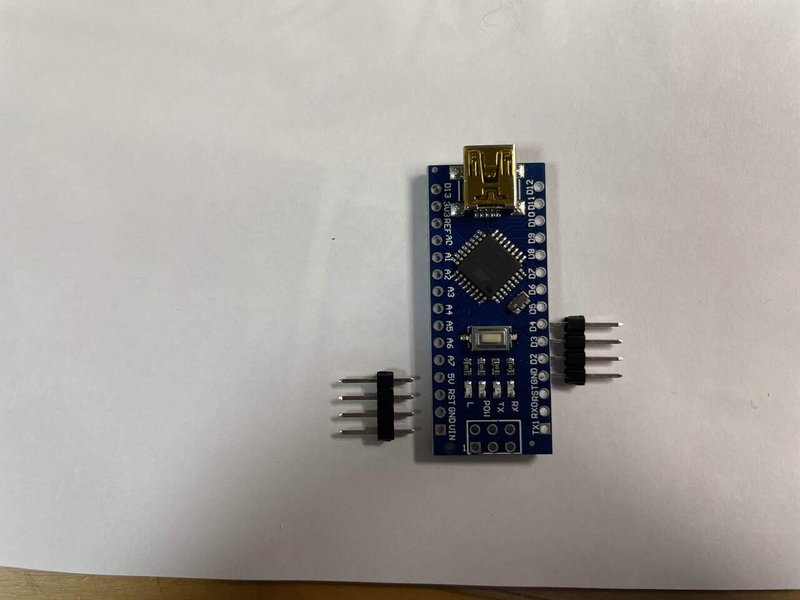
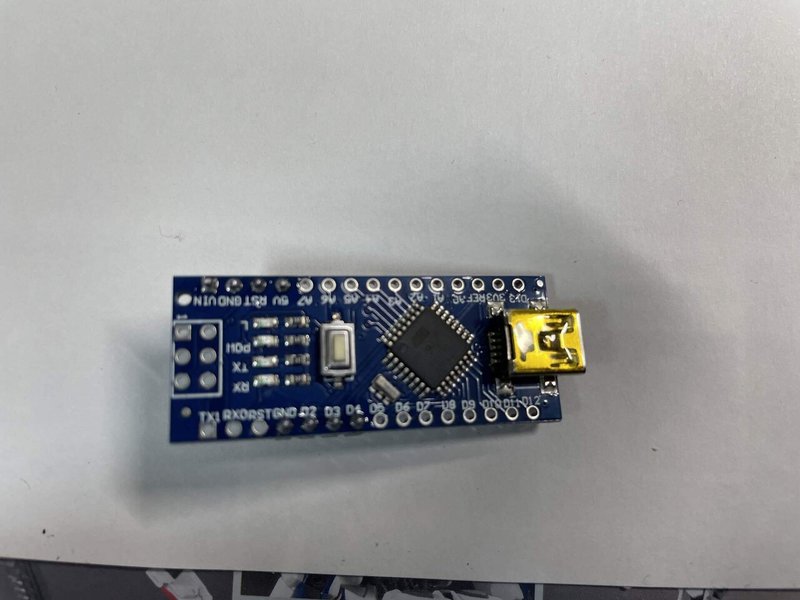
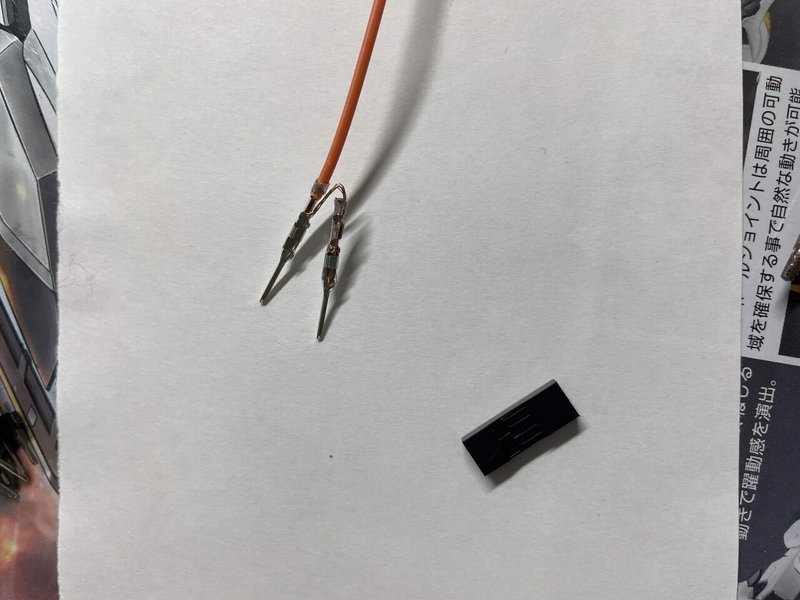
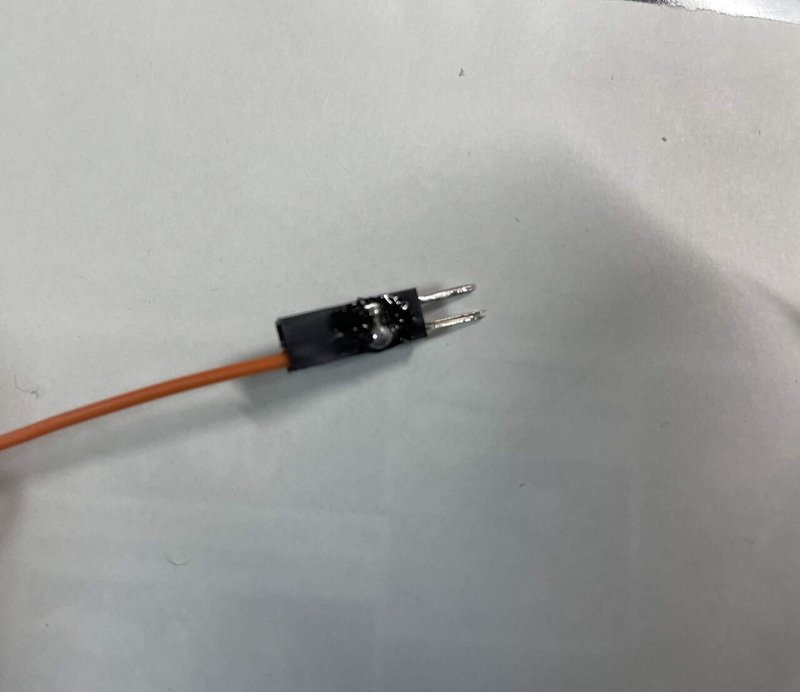
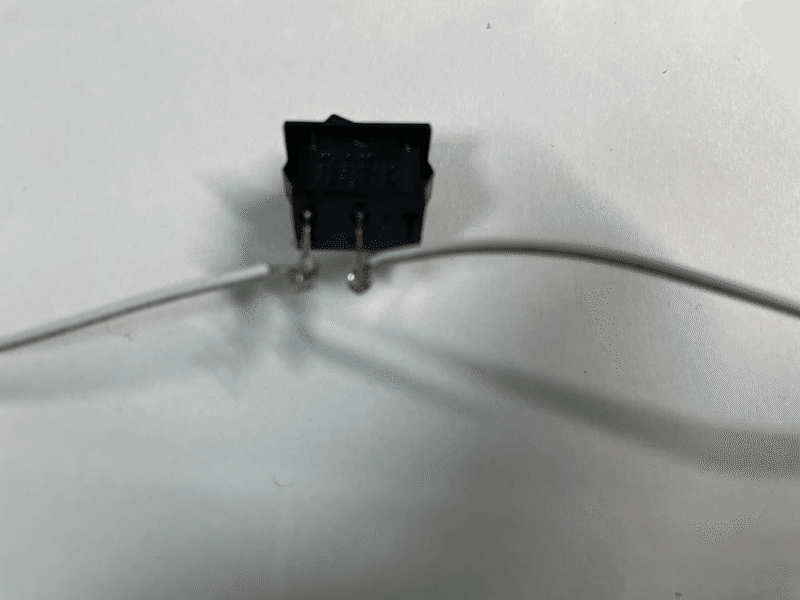
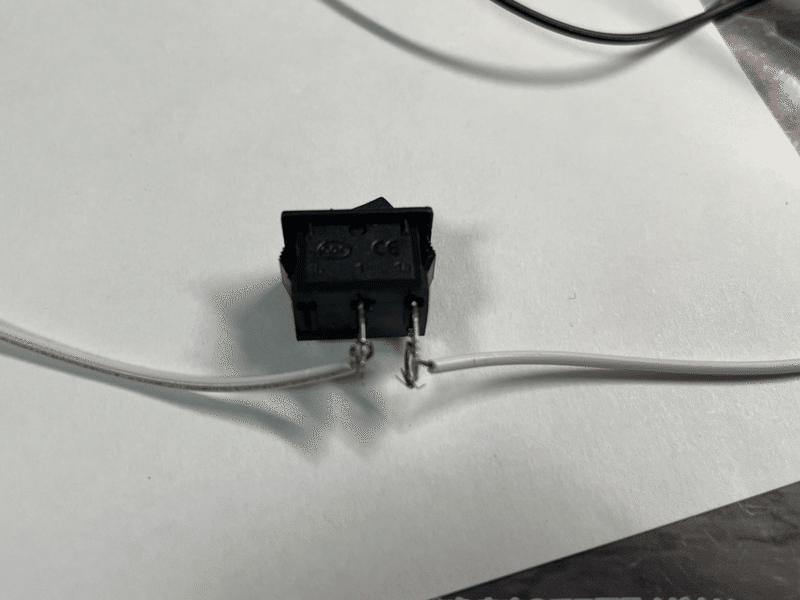
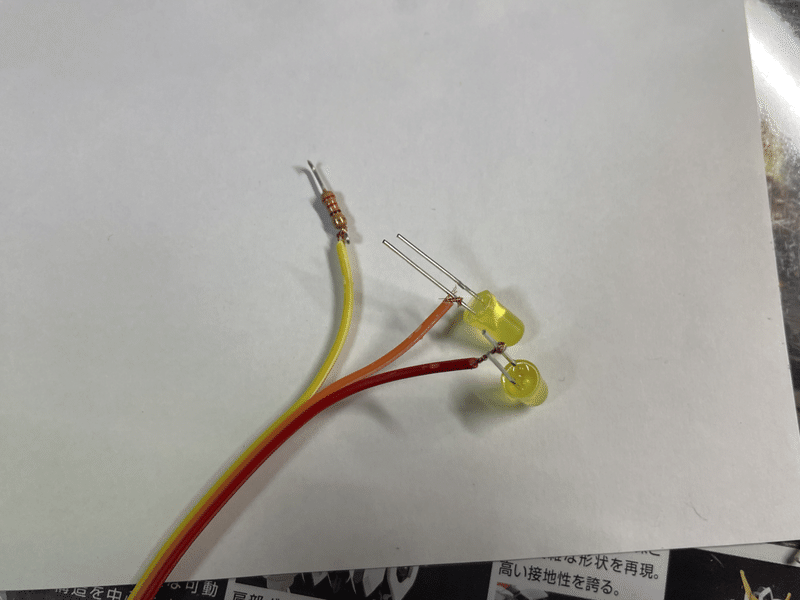
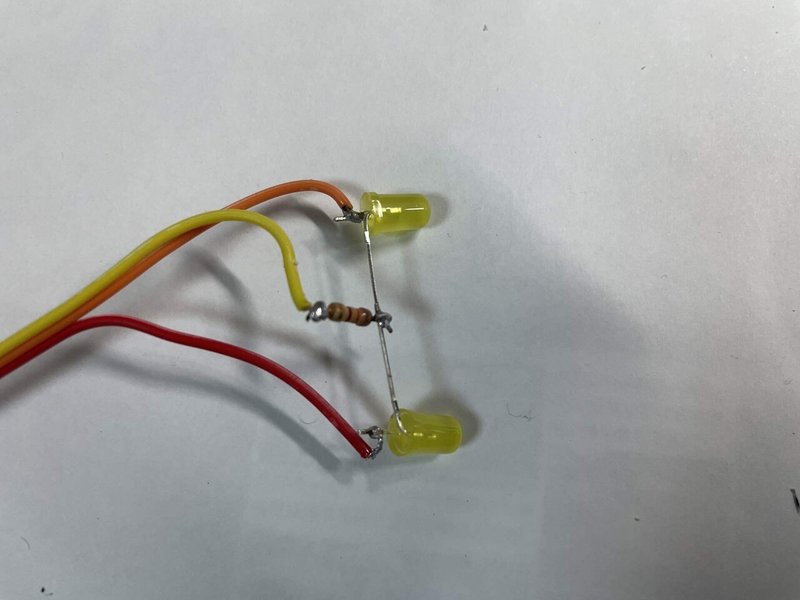
マイコンボード、スプリッタ、電源スイッチと目を表現したくて2個のLED。これらのはんだ付けをした。
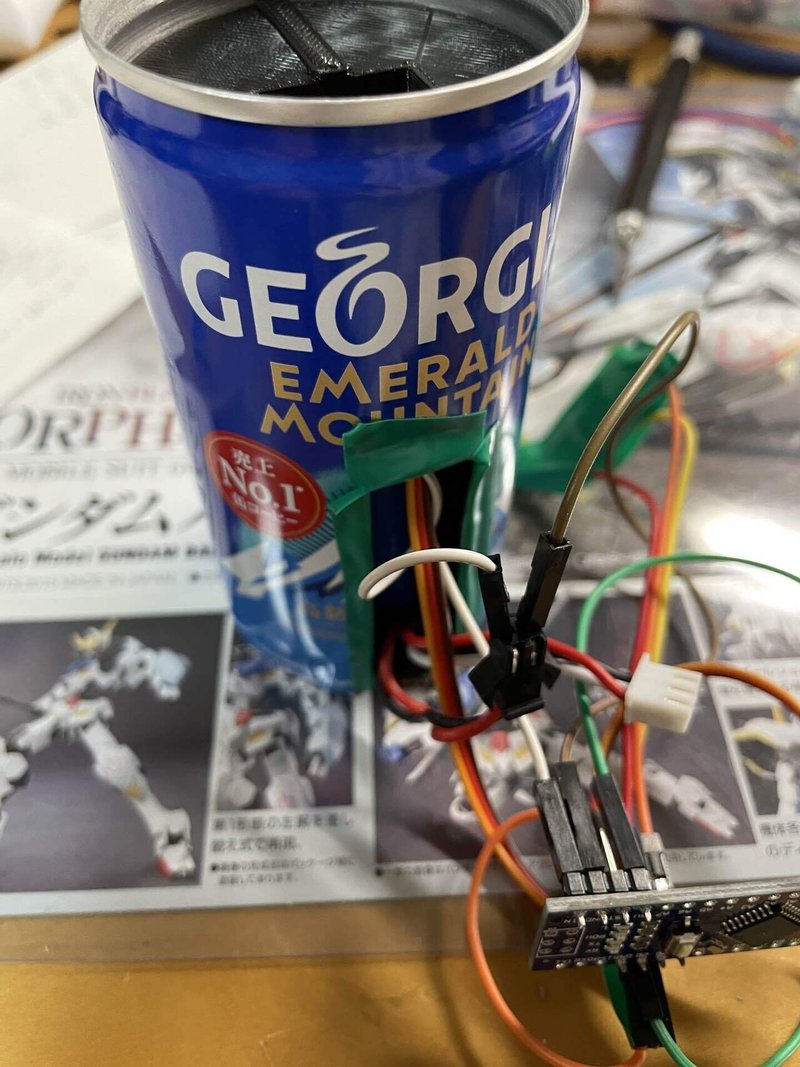
そして、回路を組んでみると…
円柱から見事にはみ出てる。
つまり、空き缶を合体させられないということである。
なので僕は苦渋の決断をした。
それが1番最初に載せた画像であった。
僕は路線を変更し、バックパックのようにみせ、キャラクター性を持たせようと考えた。
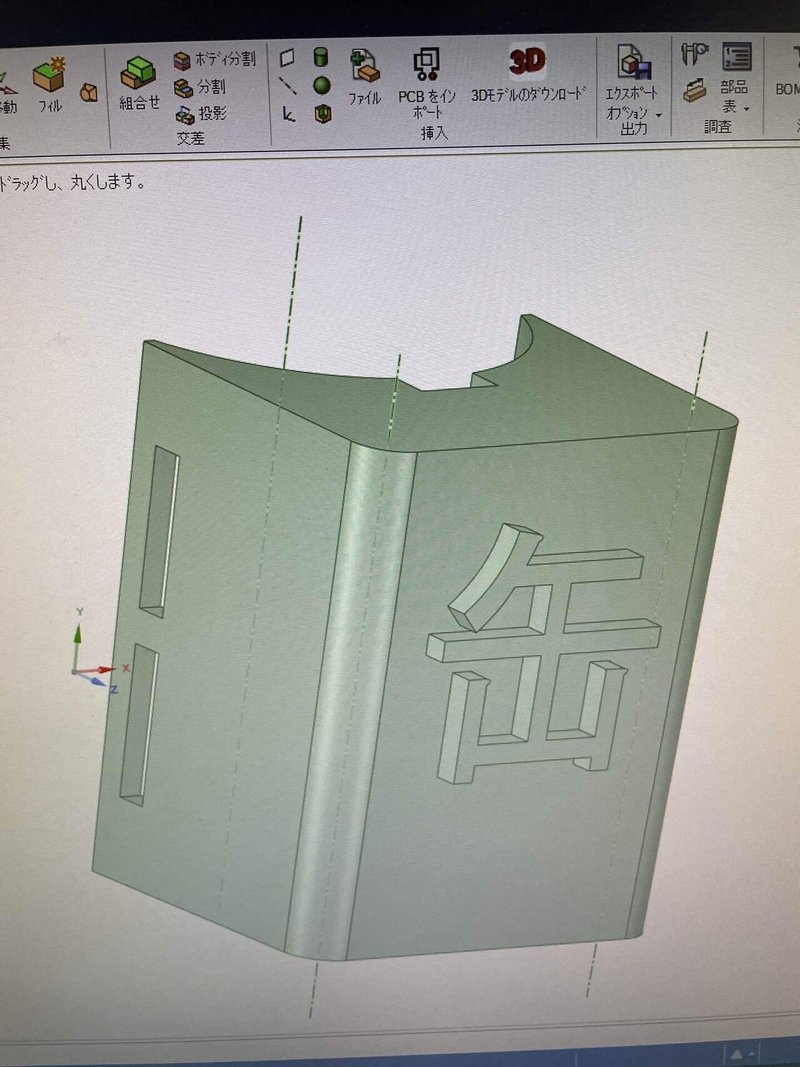
現在、3Dプリンターで制作しており、この結果は次の記事に記す。
このデータを保存しようとした時に、前まで作ってた空き缶シリーズのデータが全部飛んでたのは頭がおかしくなるくらいショックを受けた。
正直、この妥協はあまりしたくなかった。でもするしか無かった。
僕の空き缶に対する物理的想像力が明らかに欠けていた。
しかし、この妥協は無駄とは限らない。
この妥協を次の空き缶ロボットでしないためにも、今回不足していた物理的想像力を完成に向けて高めていこうと思った。
ハードウェアはもうすぐ終わり第2クールのソフトウェア編に移行する。
ソフトウェアに関して、考えていることがあり、プログラムコードを説明するのはいいのだが、読者の中には全く専門外で分からないかもという方がいるかもしれない。
なので、プログラムコードは掲載するが、コードを中心に説明するのではなく、フローチャートなどを使って簡単に説明しようと思う。
おそらくそこまで難しいアルゴリズムではない。
アルゴリズムとかフローチャートとかこの時点で分からない方は是非Googleなどで調べておいて欲しい。
3Dモデリングに関する依頼は、こちらのTwitterアカウントにて受け付けてます。固定ツイートを確認してご依頼ください。気軽でいいですほんとに。できるかだけでも聞いてください。
この記事が気に入ったらサポートをしてみませんか?