
ROS入門 (22) - UnityでURDFを読み込む

Unityで「URDF」を読み込む方法をまとめました。
・Unity 2020.3
・URDF Importer 0.5.0
前回
1. URDF
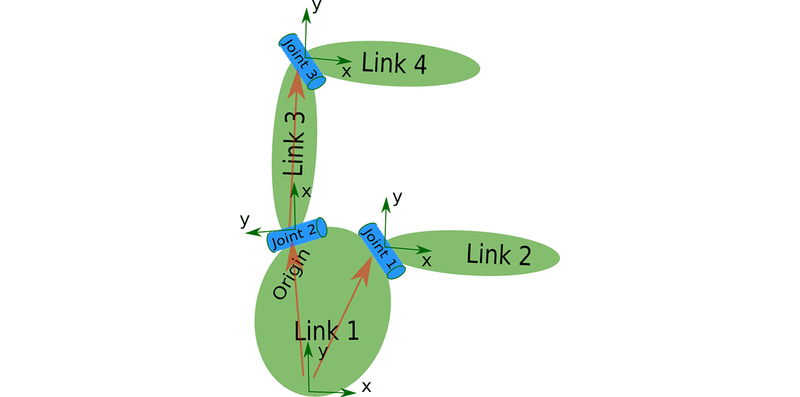
「URDF」 (Unified Robot Description Format)は、ロボットの構造を記述するためのXMLのフォーマットです。モデルの「外観」だけでなく、「リンク」や「慣性」などのを表すことができます。
「URDF」は「リンク」を「関節」で繋ぎ合わせたツリー構造になります。1つの「関節」に対して親の「リンク」は1つしか指定できません。最上位の「リンク」がロボットの基準位置になります。
・リンク : ロボットの1つの部品(台座や車輪など)。
・関節 : 2つのリンクを接続し、どう動くことができるかを定義。
2. URDF Importer
「URDF Importer」は、URDF形式で定義されたロボットをUnityシーンにインポートするためのパッケージです。
3. URDF Importerのインストール
「URDF Importer」のインストール手順は、次のとおりです。
(1) Unityのメニュー「Window → Package Manager」で「Package Manager」を開く。
(2) 「Package Manager」で「+ → Add Package from Git URL」を選択し、以下のURLを入力し、「Add」ボタンを押す。
https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer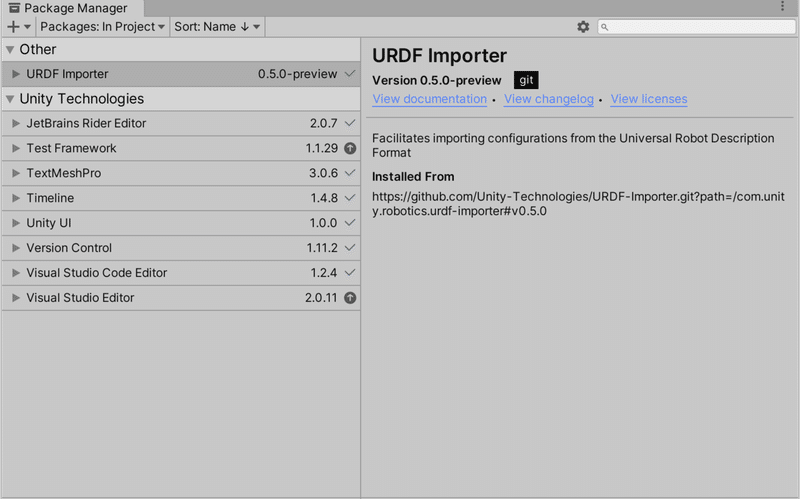
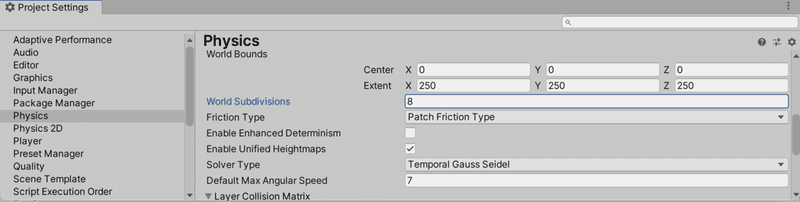
(3) メニュー「Edit → Project Settings → Physics」の「Solver Type」に「Temporal Gauss Seidel」を指定。
「Solver Type」で選択可能なソルバーは、次のとおりです。ソルバーは関節の動きや重複するRigidbody間の接触の管理など、多くの物理演算の相互作用を決定します。
・Projected Gauss Seidel : デフォルトのPhysXソルバー。
・Temporal Gauss Seidel : デフォルトのソルバーによって引き起こされる関節の不安定な動作を防止。
4. URDFのインポート
「Unity Robotics Hub」に含まれるロボットアーム「Niryo One」のURDFを読み込んでみます。
(1) Unityプロジェクトの作成。
(2) 「Unity Robotics Hub」リポジトリのクローン。
$ git clone https://github.com/Unity-Technologies/Unity-Robotics-Hub.git(3) 「Unity Robotics Hub」リポジトリの
「tutorials/pick_and_place/PickAndPlaceProject/Assets/URDF/niryo_one」をUnityプロジェクトのAssetsにコピー。
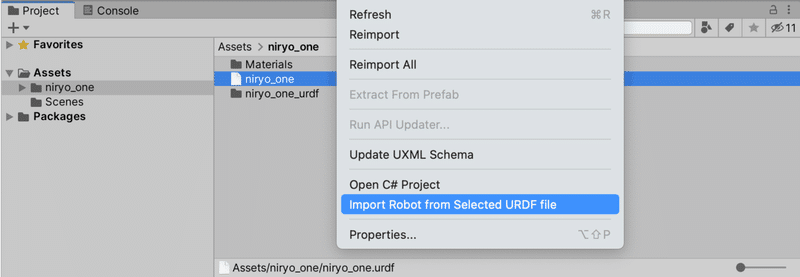
(4) URDFファイル「Assets/niryo_one/niryo_one」を右クリックし、「Import Robot from Selected URDF」をクリック。
(5) 「Y Axis」「VHACD」を指定して、「Import URDF」をクリック。

・Select Axis Type : メッシュファイルの方向。
・Select Convex Decomposer : 衝突メッシュ分解で使用するアルゴリズムを選択。
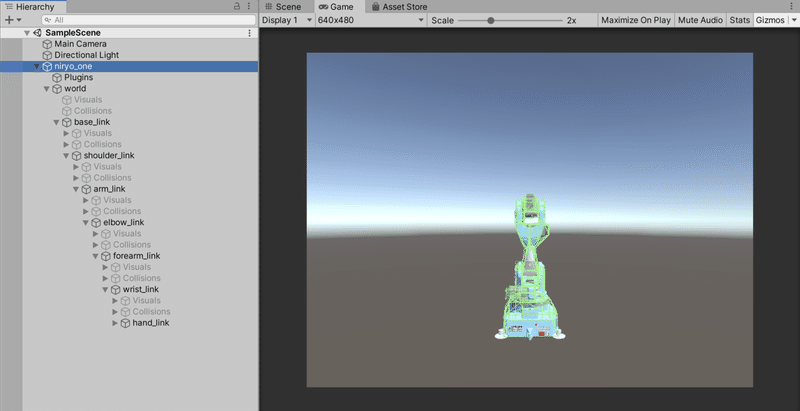
Hierarchyウィンドウに「niryo_one」が追加されます。

5. ロボットモデルの確認
Hierarchyウィンドウの「niryo_one」の「リンク」は、次のような階層構造になっています。
・niryo_one
・world
・base_link
・shoulder_link
・arm_link
・elbow_link
・forearm_link
・wrist_link
・hand_link
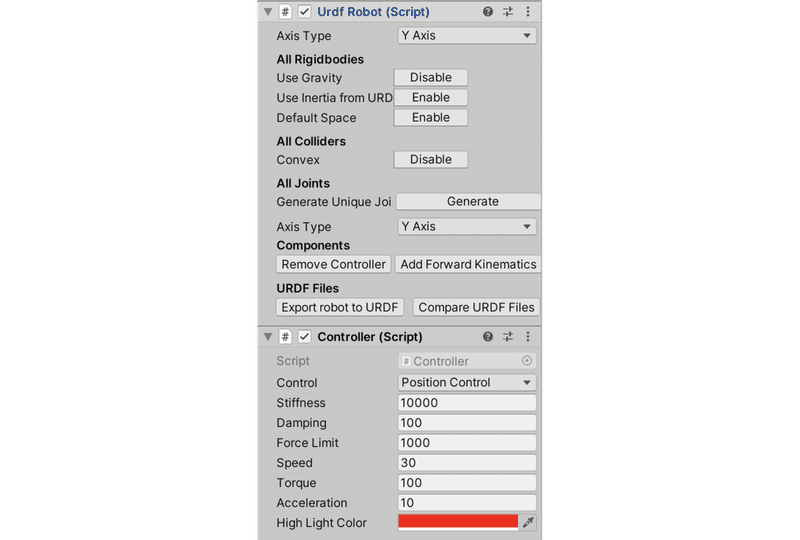
◎ niryo_one
「niryo_one」は以下のコンポーネントを持ちます。
・UrdfRobot
・Controller
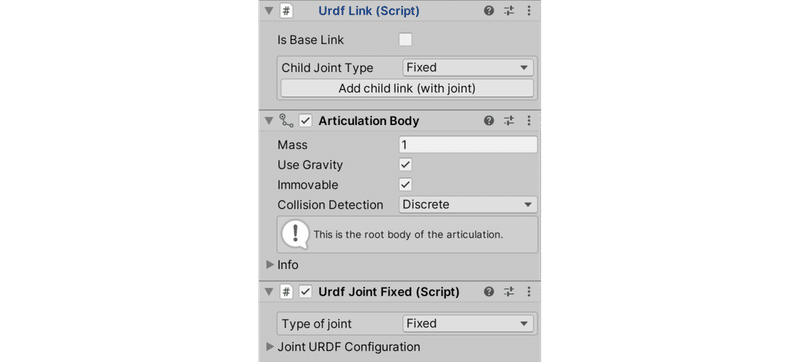
◎ base_link
「base_link」は以下のコンポーネントを持ちます。
・UrdfLink
・ArticulationBody
・UrdfJointFixed
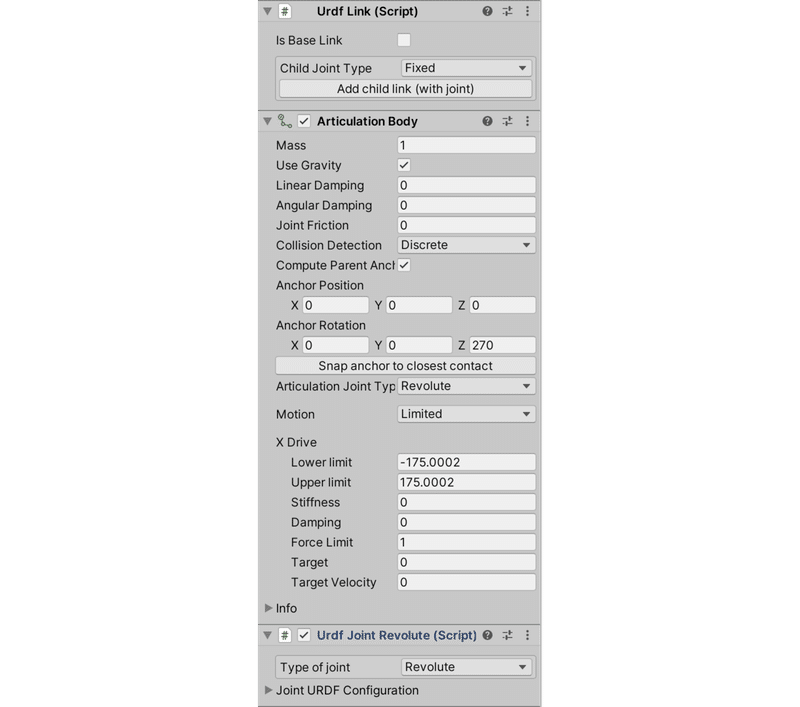
◎ その他のリンク
その他のリンクは以下のコンポーネントを持ちます。
・UrdfLink
・ArticulationBody
・UrdfJointRevolute
6. ロボットモデルの動作確認
ロボットモデルの動作確認してみます。
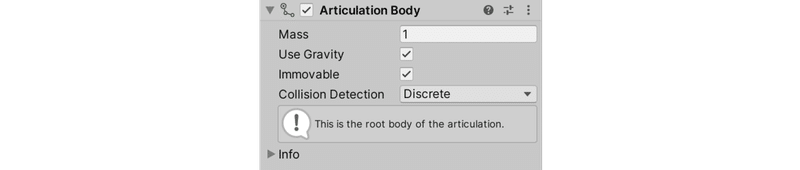
(1) 「niryo_one/world/base_link」の「Articulation Body」の「Immovable」をチェック。
リンクの座標が固定され、台座が動かなくなります。
(2) 「niryo_one」の「Controller」を以下のように設定。
キーボードでの動作確認で適用する力を指定しています。
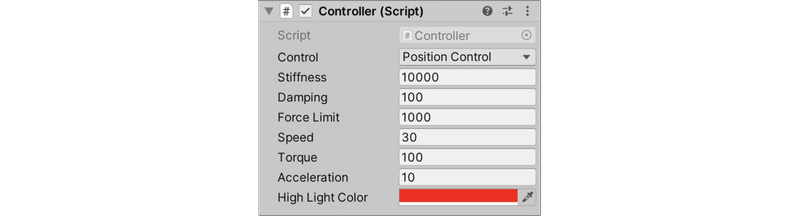
・Control : PositionControl
・Stiffness : 剛性
・Damping : 減衰
・Force Limit : 力の制限
・Speed : 速度
・Torque : トルク
・Acceleration : 加速度
・High Light Color : 選択したリンクの色
関節が滑らないようにするには、StiffnessとDampingを増やします。関節に力を適用できるようにするには、Force Limitを増やします。
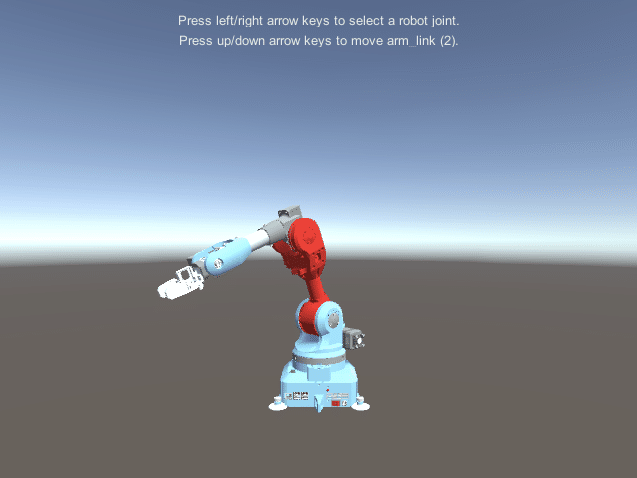
(3) Playボタンでシーンを開始。
操作方法は、次のとおりです。
・左右キー : 操作する関節(ArticulationBody)を選択。
・上下キー : 関節(ArticulationBody)を時計回りと反時計回りに回転。
次回
この記事が気に入ったらサポートをしてみませんか?