ROS入門 (55) - iPadのLiDARによるロボットの実験環境の作成

iPadのLiDARによるロボットの実験環境を作成する方法をまとめました。
前回
1. iPadのLiDARでロボットの実験環境を作成
前回、ナビゲーションを行いましたが、もっと現実に即した環境で動作確認したいので、iPadのLiDARで実験環境を作成してみます。
(1) iPhone/iPad用のLiDARアプリ「Scaniverse」で周囲を取り込む。
Nianticのおかげで高性能なのに無料なのがうれしい。
LiDARの対応端末は、次のとおりです。
・iPhone 13 Pro
・iPhone 13 Pro Max
・iPhone 12 Pro
・iPhone 12 Pro Max
・iPad Pro devices from 2020 and later
(2) obj形式でエクスポート。
MacならAirDropで直接取得できます。
(3) UnityプロジェクトのAssetsにドラッグ&ドロップ。
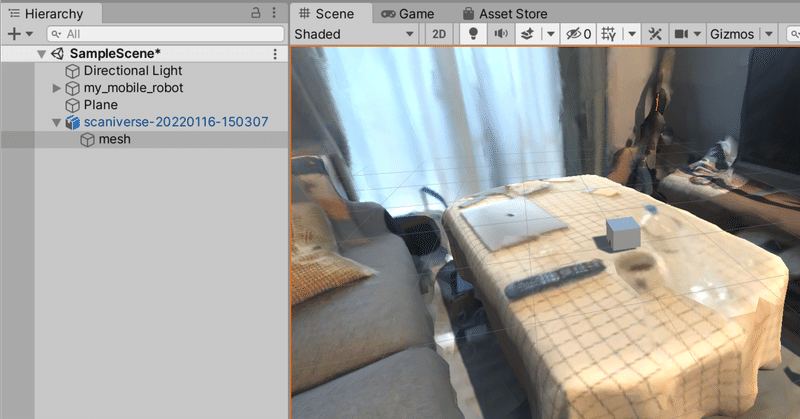
(4) 3DオブジェクトをHierarchyウィンドウにドロップ。

(5) Hierarchyウィンドウに配置したオブジェクトのmeshにMeshColliderを追加。

(6) ロボットを配置。
(7) UnityのPlayボタンで実行。

室内だと小物あるので厳しいけど、工場内のスキャンとかなら問題なさそう。
この記事が気に入ったらサポートをしてみませんか?