ROS入門 (56) - myCobotのURDFモデルの作成

「myCobot」のURDFモデルの作成方法をまとめました。
・Noetic
前回
1. URDFモデルの作成
URDFは公式の「mycobot_ros」にサンプルが含まれています。
(1) 「mycobot_ros」と「rosserial」のクローン。
$ cd ~/catkin_ws/src
$ git clone https://github.com/elephantrobotics/mycobot_ros.git -b noetic-old
$ git clone https://github.com/ros-drivers/rosserial.gitmycobot_ros/urdfフォルダにURDFファイル一式があります。

しかし、Unityで使うには、「world」や「衝突属性」や「物理属性」がないので、URDFに情報追記します。
(2) ワークスペースのビルドと実行。
$ cd ~/catkin_ws
$ catkin build(3) 「mycobot.urdf」を作成し、以下のように編集。
・mycobot.urdf
<?xml version="1.0"?>
<robot name="mycobot">
<!--world-->
<link name="world" />
<!--worldとbase_linkを繋ぐジョイント-->
<joint name="body_joint" type="fixed">
<parent link="world" />
<child link="base_link" />
</joint>
<!--base_link-->
<link name="base_link">
<!--可視化情報-->
<visual>
<origin xyz="0 0 0 " rpy=" 0 0 0" />
<geometry>
<mesh filename="package://mycobot_ros/urdf/joint1.dae" />
</geometry>
</visual>
<!--衝突属性-->
<collision>
<origin xyz="0 0 0.035" rpy="0 0 0" />
<geometry>
<cylinder length="0.07" radius="0.05" />
</geometry>
</collision>
<!--物理属性-->
<inertial>
<origin rpy="0 0 0" xyz="0 0 0.075" />
<mass value="5" />
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0" />
</inertial>
</link>
<!--base_linkとarm1_linkを繋ぐジョイント-->
<joint name="arm1_joint" type="revolute">
<parent link="base_link" />
<child link="arm1_link" />
<origin xyz="0 0 0.0706" rpy="0 0 0" />
<axis xyz="0 0 1" />
<limit effort="30" lower="-2.88" upper="2.88" velocity="1.5" />
</joint>
<!--arm1-->
<link name="arm1_link">
<!--可視化情報-->
<visual>
<origin xyz="0 0 0 " rpy=" 0 0 0" />
<geometry>
<mesh filename="package://mycobot_ros/urdf/joint2.dae" />
</geometry>
</visual>
<!--衝突属性-->
<collision>
<origin xyz="0 0 0.04" rpy="0 0 0" />
<geometry>
<cylinder length="0.08" radius="0.024" />
</geometry>
</collision>
<!--物理属性-->
<inertial>
<origin rpy="0 0 0" xyz="0 0 0.075" />
<mass value="0.1" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01" />
</inertial>
</link>
<!--arm1_linkとarm2_linkを繋ぐジョイント-->
<joint name="arm2_joint" type="revolute">
<parent link="arm1_link" />
<child link="arm2_link" />
<origin xyz="0.03256 0 0.05976" rpy="0 0 0" />
<axis xyz="1 0 0" />
<limit effort="30" lower="-2.88" upper="2.88" velocity="1.5" />
</joint>
<!--arm2_link-->
<link name="arm2_link">
<!--可視化情報-->
<visual>
<origin xyz="0 0 0 " rpy=" 0 0 0" />
<geometry>
<mesh filename="package://mycobot_ros/urdf/joint3.dae" />
</geometry>
</visual>
<!--衝突属性-->
<collision>
<origin xyz="0.03 0 0.065" rpy="0 0 0" />
<geometry>
<cylinder length="0.13" radius="0.024" />
</geometry>
</collision>
<!--物理属性-->
<inertial>
<origin rpy="0 0 0" xyz="0 0 0.06" />
<mass value="0.1" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01" />
</inertial>
</link>
<!--arm2_linkとarm3_linkを繋ぐジョイント-->
<joint name="arm3_joint" type="revolute">
<parent link="arm2_link" />
<child link="arm3_link" />
<origin xyz="0.00272 0 0.1104" rpy="0 0 0" />
<axis xyz="1 0 0" />
<limit effort="30" lower="-2.88" upper="2.88" velocity="1.5" />
</joint>
<!--arm3_link-->
<link name="arm3_link">
<!--可視化情報-->
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="package://mycobot_ros/urdf/joint4.dae" />
</geometry>
</visual>
<!--衝突属性-->
<collision>
<origin xyz="-0.03 0 0.06" rpy="0 0 0" />
<geometry>
<cylinder length="0.12" radius="0.024" />
</geometry>
</collision>
<!--物理属性-->
<inertial>
<origin rpy="0 0 0" xyz="0 0 0.06" />
<mass value="0.1" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01" />
</inertial>
</link>
<!--arm3_linkとarm4_linkを繋ぐジョイント-->
<joint name="arm4_joint" type="revolute">
<parent link="arm3_link" />
<child link="arm4_link" />
<origin xyz="-0.00164 0 0.096" rpy="0 0 0" />
<axis xyz="1 0 0" />
<limit effort="1000.0" lower="-2.88" upper="2.88" velocity="0" />
</joint>
<!--arm4_link-->
<link name="arm4_link">
<!--可視化情報-->
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="package://mycobot_ros/urdf/joint5.dae" />
</geometry>
</visual>
<!--衝突属性-->
<collision>
<origin xyz="0.03 0 0.03" rpy="0 0 0" />
<geometry>
<cylinder length="0.06" radius="0.024" />
</geometry>
</collision>
<!--物理属性-->
<inertial>
<origin rpy="0 0 0" xyz="0 0 0.06" />
<mass value="0.1" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01" />
</inertial>
</link>
<!--arm4_linkとarm5_linkを繋ぐジョイント-->
<joint name="arm5_joint" type="revolute">
<parent link="arm4_link" />
<child link="arm5_link" />
<origin xyz="0.0288 0 0.02976" rpy="0 0 0" />
<axis xyz="0 0 1" />
<limit effort="30" lower="-2.88" upper="2.88" velocity="1.5" />
</joint>
<!--arm5_link-->
<link name="arm5_link">
<!--可視化情報-->
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="package://mycobot_ros/urdf/joint6.dae" />
</geometry>
</visual>
<!--衝突属性-->
<collision>
<origin xyz="0 0 0.035" rpy="1.57075 0 0" />
<geometry>
<cylinder length="0.06" radius="0.024" />
</geometry>
</collision>
<!--物理属性-->
<inertial>
<origin rpy="0 0 0" xyz="0 0 0.06" />
<mass value="0.1" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01" />
</inertial>
</link>
<!--arm5_linkとarm6_linkを繋ぐジョイント-->
<joint name="arm6_joint" type="revolute">
<parent link="arm5_link" />
<child link="arm6_link" />
<origin xyz="0 0.0456 0.03792" rpy="0 0 0" />
<axis xyz="0 1 0" />
<limit effort="30" lower="-3.05" upper="3.05" velocity="1.5" />
</joint>
<!--arm6_link-->
<link name="arm6_link">
<!--可視化情報-->
<visual>
<origin xyz="0.0 0 0.0" rpy="1.57075 0 0" />
<geometry>
<cylinder length="0.005" radius="0.02" />
</geometry>
<material name="dark blue">
<color rgba="0.1 0.1 0.9 1" />
</material>
</visual>
<!--衝突属性-->
<collision>
<origin xyz="0.0 0 0.0" rpy="1.57075 0 0" />
<geometry>
<cylinder length="0.005" radius="0.02" />
</geometry>
</collision>
<!--物理属性-->
<inertial>
<origin rpy="0 0 0" xyz="0 0 0.06" />
<mass value="0.1" />
<inertia ixx="0.01" ixy="0.0" ixz="0.0" iyy="0.01" iyz="0.0" izz="0.01" />
</inertial>
</link>
</robot>(4) rvizで表示を確認。
$ roslaunch urdf_tutorial display.launch model:=mycobot.urdf
2. Unityへのインポート
「URDF Importer」でインポートします。
(1) Unityプロジェクトの作成。
(2) Unityの「Package Manager」の「+ → Add package from git URL」で、以下のパッケージをインストール。
・URDF Importer
https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer(3) UnityプロジェクトのAssetsフォルダにmycobotフォルダを作成し、作成した「mycobot.urdf」と、「mycobot_ros」の「dae」を配置。
(4) 「mycobot.urdf」を右クリックして、「Import Robot from Selected URDF file」を選択。

(5) 「Import URDF」ボタンを押す。

(6) daeファイルのパスを要求されるので、1から順番に指定。

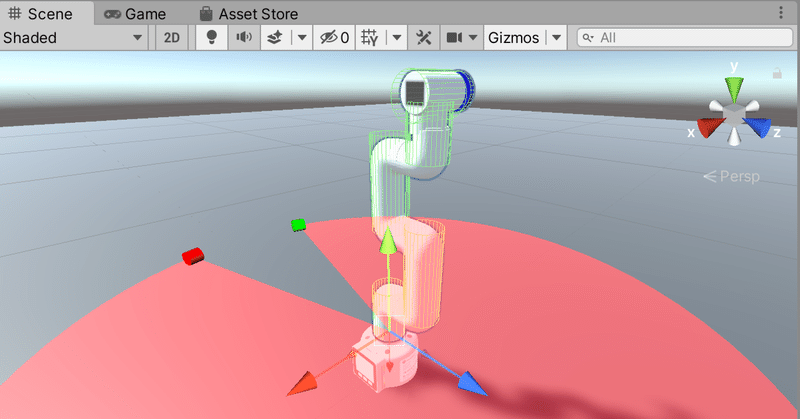
(7) 見た目、衝突判定、関節角度の制限などを確認。

参考
この記事が気に入ったらサポートをしてみませんか?