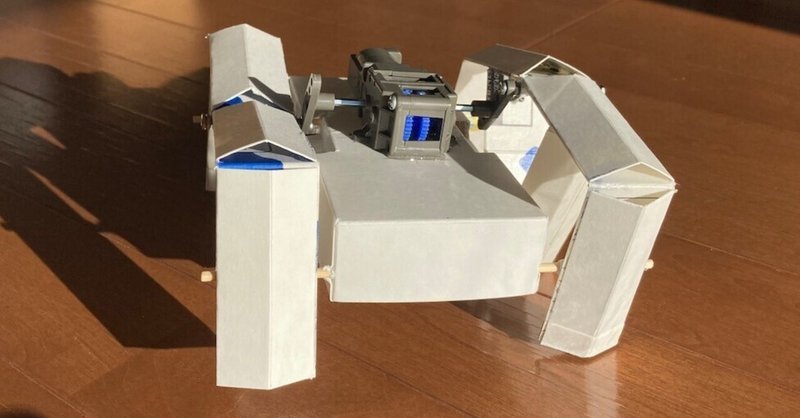
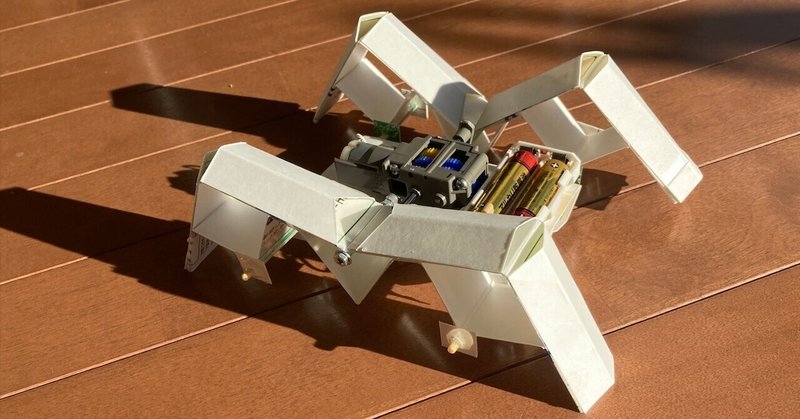
牛乳パックロボ「GP1B3」の作り方
GP1B3 は牛乳パック1本から脚と本体を一体で作り出されたリンク機構ロボットです.
脚は前後の2本で,先端は同じ角度の回転運動を行い,本体を持ち上げたり下ろしたりすることで前進します.
前後の脚のリンク機構と,ギヤボックスと電池ボックスを固定する本体は1本の牛乳パックを切り出して折りたたんで作成します.
極力切り離さないために,展開図は多少複雑な切り込みと折り線から構成されてますが,ロボットの構造はシンプルなので作りやすいと思います.
ぜひ,折り紙のように平面から立体のロボ