発散なしベクトル場がソレノイド場であることを導く

この前の記事では「渦なしベクトル場と勾配場が同じものであること」を書きましたが、今回は 3次元ベクトル場 $${ \bm{A} (\bm{x}) }$$ について、以下の 1. 2. 3. が同値であることを説明します:
恒等的に $${ \nabla \cdot \bm{A} = 0 }$$ である
任意の閉曲面 $${ \mathcal{S} }$$ に対して $${ \displaystyle \oiint_{\mathcal{S}} \bm{A} \cdot \bm{n} \mathrm{d} S = 0 }$$ が成り立つ
$${ \bm{A} = \nabla \times \bm{P} }$$ となるベクトル場 $${ \bm{P} }$$ が存在する (このようなベクトル場 $${ \bm{A} }$$ をソレノイド場といいます)
(この前の記事をコピーして書いているので、以下の日本語がところどころ前の記事と一緒です。)
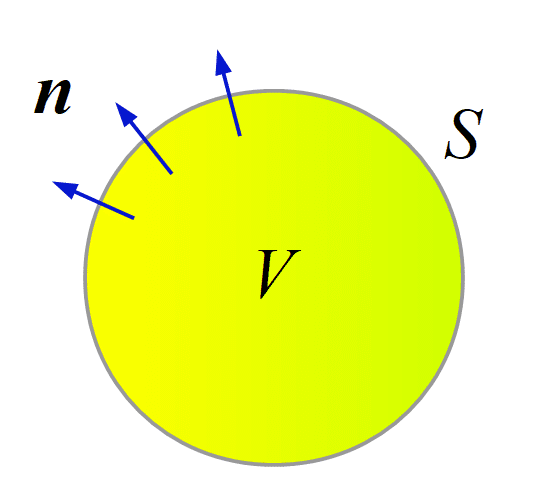
今回の主役はガウスの定理です。3次元空間内のある領域 $${ \mathcal{V} }$$ とそれを囲む閉曲面 $${ \mathcal{S} }$$ を考えて、その面 $${ \mathcal{S} }$$ 上の微小面積要素 $${ \mathrm{d} S }$$ での単位法線ベクトルを $${ \bm{n} }$$ とすると、ベクトル場 $${ \bm{A} }$$ について
$$
\iiint_{\mathcal{V}} \left( \nabla \cdot \bm{A} \right) \mathrm{d} V
= \oiint_{\mathcal{S}} \bm{A} \cdot \bm{n} \mathrm{d} S
$$
が成り立つ、という定理です。左辺の $${ \mathrm{d} V = \mathrm{d} x \, \mathrm{d} y \, \mathrm{d} z }$$ は 3次元体積要素を表します。
この定理を前提にすると、1. $${ \Rightarrow }$$ 2. はすぐに分かります。また、3. $${ \Rightarrow }$$ 1. はベクトル解析の基本的な公式から、やはりすぐに分かります。3. $${ \Rightarrow }$$ 2. は、3. $${ \Rightarrow }$$ 1. $${ \Rightarrow }$$ 2. とたどればよいですが、以下のようにして直接示すこともできます:
ある閉曲面 $${ \mathcal{S} }$$ を二つの曲面 $${ \mathcal{S}_1 , \mathcal{S}_2 }$$ に分割し、その際にできる切り口の部分の閉曲線を $${ \mathcal{C}_1 , \mathcal{C}_2 }$$ とします。

すると、ストークスの定理より
$$
\iint_{\mathcal{S}_1} \left( \nabla \times \bm{P} \right) \cdot \bm{n} \mathrm{d} S = \oint_{\mathcal{C}_1} \bm{P} \cdot \mathrm{d} \bm{r} \ , \quad
\iint_{\mathcal{S}_2} \left( \nabla \times \bm{P} \right) \cdot \bm{n} \mathrm{d} S = \oint_{\mathcal{C}_2} \bm{P} \cdot \mathrm{d} \bm{r}
$$
となります。ここで一つ注意が必要なのが、この二つの曲線 $${ \mathcal{C}_1 , \mathcal{C}_2 }$$ は、形としては同じですが、上の式の線積分において周回する向きは互いに逆である、ということです。したがって
$$
\oint_{\mathcal{C}_1} \bm{P} \cdot \mathrm{d} \bm{r} = - \oint_{\mathcal{C}_2} \bm{P} \cdot \mathrm{d} \bm{r}
$$
となるので
$$
\iint_{\mathcal{S}} \left( \nabla \times \bm{P} \right) \cdot \bm{n} \mathrm{d} S
= \iint_{\mathcal{S}_1} \left( \nabla \times \bm{P} \right) \cdot \bm{n} \mathrm{d} S + \iint_{\mathcal{S}_2} \left( \nabla \times \bm{P} \right) \cdot \bm{n} \mathrm{d} S \\\ \\\
= \oint_{\mathcal{C}_1} \bm{P} \cdot \mathrm{d} \bm{r} + \oint_{\mathcal{C}_2} \bm{P} \cdot \mathrm{d} \bm{r} = 0
$$
となります。
このようにして 1. $${ \Rightarrow }$$ 2., 3. $${ \Rightarrow }$$ 1., 3. $${ \Rightarrow }$$ 2. は比較的簡単に示すことができますが、2. $${ \Rightarrow }$$ 1. と 2. $${ \Rightarrow }$$ 3. を示すのは少し難しく、工夫が必要です。また、1. $${ \Rightarrow }$$ 3. については、これを示すこと自体は難しくないですが、多少の考察が必要となります。以下、そのことを解説していきます。
「『閉曲面上の面積分がゼロ』ならば『発散なし場』」を示す
まず 2. $${ \Rightarrow }$$ 1. を示すことを考えます。これは直接的に示すのが難しいので、背理法を使います。2. が成り立っているときに、1. が成り立たないとすると矛盾が生じる、ということを示せばよいわけです。そこで、空間内のある領域で $${ \nabla \cdot \bm{A} > 0 }$$ となっているとします。そして、その領域内に「$${ \nabla \cdot \bm{A} }$$ の値がある正の定数 $${ K }$$ 以上である」ような領域を考え、これを $${ \mathcal{D}_K }$$ とします。また、$${ \nabla \cdot \bm{A} = K }$$ となる点をつなげてできる曲面を $${ \mathcal{S}_K }$$ とすると、この $${ \mathcal{S}_K }$$ は領域 $${ \mathcal{D}_K }$$ を取り囲む閉曲面とすることができます。なぜなら、例えば $${ \nabla \cdot \bm{A} }$$ が最大値をとる点を取り囲むように $${ \mathcal{S}_K }$$ を選び、その内部を $${ \mathcal{D}_K }$$ とすればよいからです。

すると、ガウスの定理より
$$
\oiint_{\mathcal{S}_K} \bm{A} \cdot \bm{n} \mathrm{d} S =
\iiint_{\mathcal{D}_K} \left( \nabla \cdot \bm{A} \right) \mathrm{d} V
\ge \iiint_{\mathcal{D}_K} K \mathrm{d} V
$$
となりますが、この式の最右辺は正の値をとる(ゼロにはならない)ので 2. に矛盾します。この矛盾は「空間内のある領域で $${ \nabla \cdot \bm{A} > 0 }$$ となっている」という仮定をしたことにより生じたものですので、この仮定は成り立たないことになります。同様に、「空間内のある領域で $${ \nabla \cdot \bm{A} < 0 }$$ となっている」ことを仮定して矛盾を導くこともできますので、この仮定もやはり成り立たないことになって、「恒等的に $${ \nabla \times \bm{A} = 0 }$$ が成り立つ」ということが言えます。
ポイントは、ガウスの定理で領域 $${ \mathcal{V} }$$ の選び方は任意なので、もし $${ \nabla \cdot \bm{A} \ne 0 }$$ の領域があるとすると、 $${ \nabla \cdot \bm{A} }$$ を正の値しかとらない(または負の値しかとらない)ように領域をつくることができてしまう、というところです。
「『発散なし場』ならば『ソレノイド場』」を示す
次に 1. $${ \Rightarrow }$$ 3. を示します。
示したいことは「$${ \bm{A} = \nabla \times \bm{P} }$$ となる $${ \bm{P} }$$ が存在すること」なので、与えられた発散のないベクトル場 $${ \bm{A} }$$ から $${ \bm{P} }$$ をつくることができればよいわけです。一つ注意が必要なのは、$${ \bm{P} }$$ には不定性があって一意には決まらない、ということです。なぜなら、ある $${ \bm{P} }$$ によって $${ \bm{A} = \nabla \times \bm{P} }$$ となるとき、これに任意のスカラー関数 $${ \psi (\bm{x}) }$$ の勾配 $${ \nabla \psi }$$ を加えた $${ \bm{P}' = \bm{P} + \nabla \psi }$$ と表されるベクトル場もまた $${ \bm{A} = \nabla \times \bm{P}' }$$ を満たすからです。実はこのことは、今やろうとしていることに関してむしろ便利に使うことができます。例えば、スカラー関数 $${ \psi (\bm{x}) }$$ を適当にとることによって、ベクトル $${ \bm{P} }$$ の一成分をゼロにすることができる、と考えられるからです。
$${ \bm{P} }$$ の各成分を求めるために、$${ \bm{A} = \nabla \times \bm{P} }$$ を成分で書くと
$$
A_x = \frac{\partial P_z}{\partial y} - \frac{\partial P_y}{\partial z} \ , \quad
A_y = \frac{\partial P_x}{\partial z} - \frac{\partial P_z}{\partial x} \ , \quad
A_z = \frac{\partial P_y}{\partial x} - \frac{\partial P_x}{\partial y}
$$
となりますが、ここで上に述べた $${ \psi (\bm{x}) }$$ を適当にとることにより $${ P_x =0 }$$ とできます。もう少し詳しくいうと、もしゼロでない $${ P_x }$$ を持つ $${ \bm{P} }$$ が得られたとすると、その $${ P_x }$$ に対して $${ \dfrac{\partial \psi}{\partial x} = -P_x }$$ となるような $${ \psi (\bm{x}) }$$ を考えて $${ \bm{P} }$$ を再定義すればよいわけです。このとき、上の $${ A_y , A_z }$$ の式は
$$
- \frac{\partial P_z}{\partial x} = A_y \ , \quad \frac{\partial P_y}{\partial x} = A_z
$$
となるので、空間内の点 $${ \left( x_0 , y_0 , z_0 \right) }$$ を基準点として積分すると
$$
P_y = \int_{x_0}^x A_z \left( x' , y , z \right) \mathrm{d} x' + c_1 (y, z) \\\ \\
P_z = -\int_{x_0}^x A_y \left( x' , y , z \right) \mathrm{d} x' + c_2 (y, z)
$$
($${ c_1 , c_2 }$$ は $${ y, z }$$ の任意関数)となります。これを $${ A_x }$$ の式に代入すると
$$
A_x (x,y,z) = - \int_{x_0}^x \left( \frac{\partial A_y}{\partial y} + \frac{\partial A_z}{\partial z} \right) \left( x', y, z \right) \mathrm{d} x'
+ \frac{\partial c_2}{\partial y} (y,z) - \frac{\partial c_1}{\partial z} (y,z)
$$
となりますが、ここで $${ \nabla \cdot \bm{A} =0 }$$ を成分で書いた
$$
\frac{\partial A_x}{\partial x} + \frac{\partial A_y}{\partial y} + \frac{\partial A_z}{\partial z} = 0
$$
を使うと
$$
A_x (x,y,z) = \int_{x_0}^x \frac{\partial A_x}{\partial x} \left( x', y, z \right) \mathrm{d} x'
+ \frac{\partial c_2}{\partial y} (y,z) - \frac{\partial c_1}{\partial z} (y,z) \\\ \\\
= A_x (x,y,z) - A_x (x_0 ,y,z) + \frac{\partial c_2}{\partial y} (y,z) - \frac{\partial c_1}{\partial z} (y,z)
$$
となるので、任意関数 $${ c_1 , c_2 }$$ は
$$
\frac{\partial c_2}{\partial y} (y,z) - \frac{\partial c_1}{\partial z} (y,z) = A_x (x_0 ,y,z)
$$
を満たすように決めればよいことが分かります。ここでもやはり不定性があって、$${ c_1 , c_2 }$$ は一意には決まりませんが、スカラー関数 $${ \psi (\bm{x}) }$$ を適当に選ぶことにより、例えばどちらか一方をゼロにする、等ができます。もし $${ c_1 (y,z) = 0 }$$ とすると、
$$
c_2 (y,z) = \int_{y_0}^y A_x \left( x_0 , y', z \right) \mathrm{d} y'
$$
と決まります。
このようにして、与えられたベクトル場 $${ \bm{A} }$$ から $${ \bm{P} }$$ をつくられることが分かりましたので、 1. $${ \Rightarrow }$$ 3. を示すことができました。
最後に 2. $${ \Rightarrow }$$ 3. について、すでに 2. $${ \Rightarrow }$$ 1. と 1. $${ \Rightarrow }$$ 3. が示されているので、論理的にはつながっていますが、直接示すことも可能です。ただ、それは技術的に少し難しくなるので、別の記事に書くことにします。
このように、「1. あるいは 3. から 2. を示す」のは難しくなく、教科書・演習書にもよく載っていますが、「2. から 1. を示す」「1. から 3. を示す」のはやや難しい、あるいは注意が必要で、教科書を見ても詳しい説明が省略されていることがあります。ベクトル解析の計算にある程度慣れた後で、この記事で扱っているような部分での論理的なつながりが気になる人もいるかもしれません。この記事がそのような人の理解の助けとなれば幸いです。
この記事が気に入ったらサポートをしてみませんか?