
黄色を追いかけるロボットを作ってみよう〈色追跡拡張機能〉

今回のアップデートでは、カメラを使って「赤・青・緑・黄」の4つの色の場所の座標を調べることができる拡張機能を新しく追加しました🙌
新しい色を追いかける拡張機能を使って、黄色を追いかけるロボットを作ってみましょう🙋
今回の作例のポイントは、2つのモータを重ねて「うなずく」動きと、「首を振る」動きを作ることです💡
この作例で使っているもの

・紙コップ
・両面テープ
・はさみ
・ココロキット+(モータ2個、スイッチ1個、白い部品)
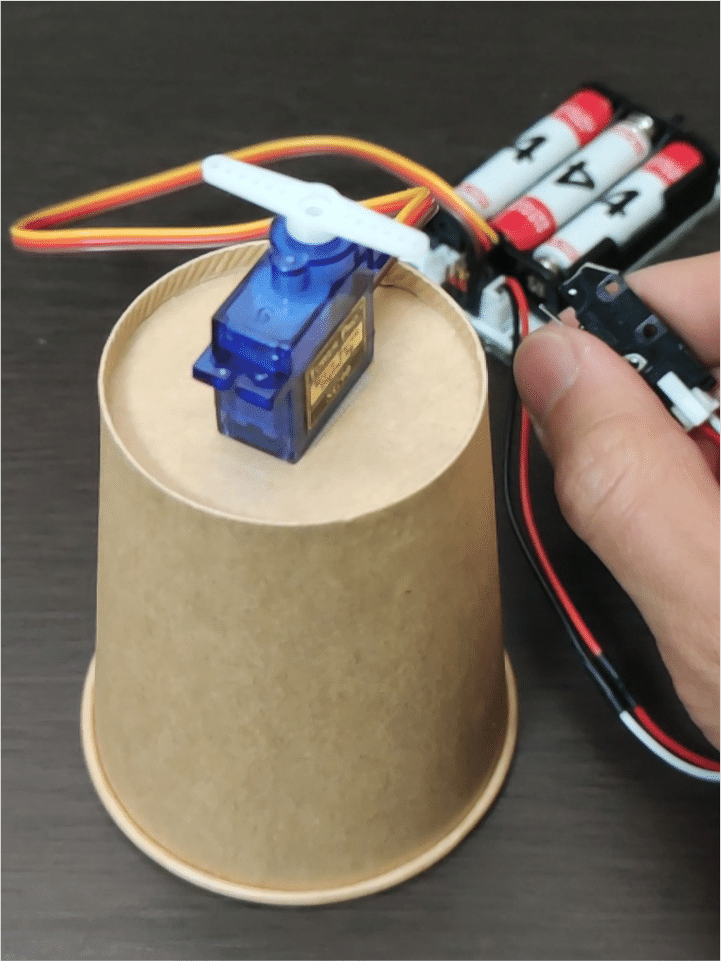
1つ目のモータを紙コップに貼り付ける
紙コップの上に両面テープで貼り付けます。

下の画像の白い部品を付けたら、モータを1番に挿します。
動かしてみましょう!
動かし方をまだ知らない!という方は、作るときにこの記事を読んでくださいね!とりあえずは読み進めましょう🙋
2つ目のモータを貼り付ける
1つ目のモータの白い部品に両面テープを貼り付けて、下の画像のように2つ目のモータを貼り付けます。

残りの白い部品を付けた後の、別の角度からの写真です👀

モータを2番に挿したら、動かして見ましょう!
これでロボットの動きは完成です!👏
ロボットの顔を作って、取り付けます
2つ目のモータに顔を付けるんですが、モータの幅とほぼ同じ長さで顔を作ります。

こんな感じです。コの字の形の顔を作ります。

ちょっと強度が心配なので、コの字の空いた部分に新しい紙を貼り付けておきます。

このように2つ目のモータに貼り付けます。

動かして見ると…。元気よく横を向くロボットの完成です!👏
サンプルプログラムを動かして見ましょう!
「黄色を追いかけるロボット」を動かすのに必要なのは、
カメラがついているパソコンです🙋
次のサンプルプログラムを開いたら、ココロキット+をつなぎます。
👉 https://kurikit.ux-xu.com/play/#100000003
サンプルプログラムを動かす方法がわからない方は、こちらのnoteを読んでくださいね🏃
ココロキット+とつないで動かせば、黄色を追いかけるロボットを試してもらえます!😁

この作例をロボットとして使ってみる
このロボットは、首を縦に振ってうなずいたり、首を振って「ちがうちがう」と示すことができます😀
なので音声認識機能と組み合わせると、話しかけるとうなずくロボットが作れたりします!
また、音声合成(Text-to-Speech)という文字から音(声)を作ってくれる機能もあるので、こちらのnoteの中で少し使っている「音声合成」という拡張機能を使うと、「それはちがう!」と首を振りながら答えることができるロボットを作れます!
ぜひ、試してみてください💪

この記事が気に入ったらサポートをしてみませんか?