
【ヘルプ】前進させて、すぐに後進させたいとき(2つのモータを同時にうごかす)

今回の記事は、この動きをさせたい人向けの記事になります!

ココロキットでは苦手な処理がありますので、現象を理解していただき正しく動くようにプログラムしていただければと思っております 🙇
2つのモータを同時に正回転から逆回転にしたいとき、うまく動かない
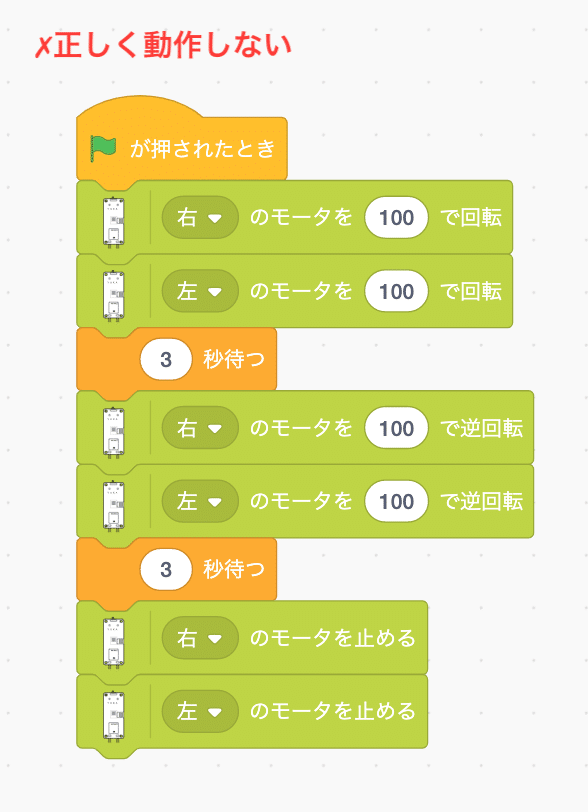
ココロキットで、上記のプログラム(左右のモータを正回転で3秒、左右のモータを逆回転で3秒、止まる)を動かした際にモータの動きがプログラム通りにならない現象を確認しております。


ロボットの動きを見てみると、上記の矢印で示している「左のモータを100で逆回転」が実行できていないことがわかります。
こちらですが、2つのモータの回転を同時に反転させるコマンドを送信する際に、2個目のコマンドを正しく処理することができません。
以下のように一度モータを停止してから逆回転させると正しく動作しますので、プログラムの改良をお願いします。
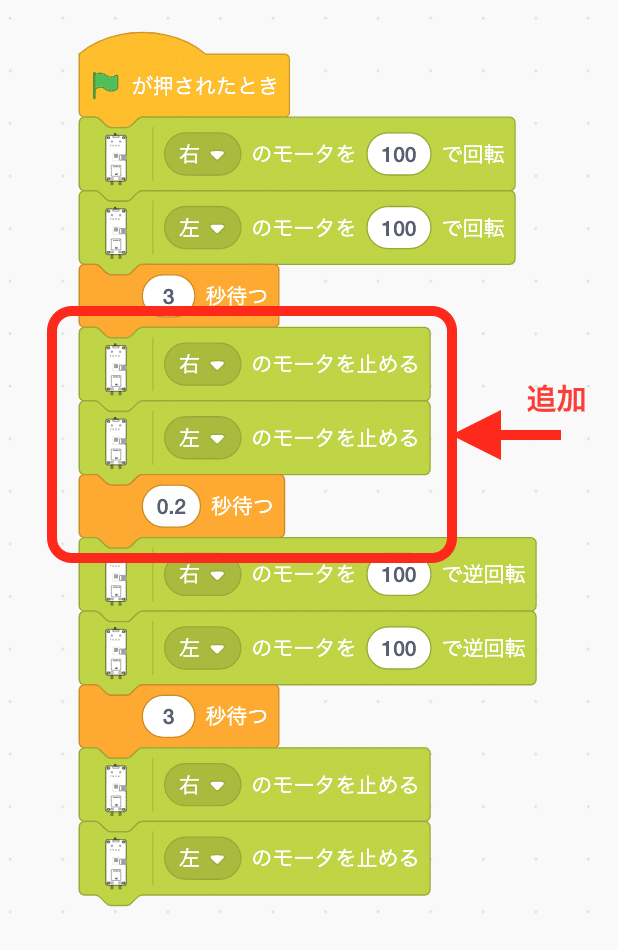

コツ:2つのモータを同時に反転させたいときは、一度モータを止める処理を入れましょう
ココロキットは、複数の命令を短い時間に同時に実行することが苦手です。
以下の記事も参考にしながら、waitブロックとうまく組み合わせてご利用いただければと思います。
こちらの他にも、プログラミングはあっているはずなのに、うまく動作しないという場合は、以下へご連絡いただけますとサポートさせていただきます。
この記事が気に入ったらサポートをしてみませんか?