
電子工作素人によるスタックチャン製作記3(サーボ工作編)

これまでの記事(というか作業記録)と、今後の予定です。
以下、今後の予定
スタックチャン・顔カスタマイズ編:m5stack-avatar
シン・スタックチャン編:AI ChatGPT対応
ひとまず、前回でM5Stack Core2の起動とかデータの送り方とかが分かったということで、今回はスタックチャンの筋肉ともいえるサーボモーターを接続するための配線キットを組み立て抵抗と思います。
今日の具材
4pinデュポンコネクタハウジング
ミニブレッドボード(25)
両端ロングピンヘッダ(4pin)× 2、(3pin)× 1
Grove-デュポン変換ケーブル(ピンなし)
電解コンデンサ 6.3V 220μF
セラミックコンデンサ 50V 0.1μF
サーボモータ × 2
今回はM5Stack Servo Kit 180 と FEETECH FS90MG の組み合わせにしてみます。種類をバラバラにしたのは特に意図はないです。図では袋のままですが、実際には各1個ずつ使用です。

その他、作業道具
ピンセット
ニッパー
実施内容
サーボモータのコネクタを外す
どちらか1つのサーボモータのコネクタを、4pinデュポンコネクタハウジングに取り替えるため、既存のコネクタを取り外します。
このコネクタを取り替えたサーボモータは水平方向の動作用になります。
今回はM5Stack Servo Kit 180のサーボモータのコネクタを交換してみます。
ピンセットなどでコネクタの隙間から爪を持ち上げると、コードを引き抜けます。結構狭いので、そこそこ先が細いものが良いです。今回はプラモ用のピンセットがあったので助かりました。

サーボモータのコネクタを付け替える
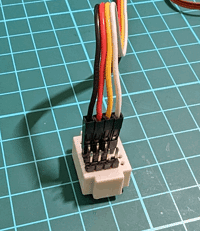
4pinデュポンコネクタハウジングに対して、コネクタを止める爪がある面を上にして次の順番に取り付けます。
黄
空き
赤
茶(GND)

ミニブレッドボードの準備
スタックチャンのBodyの内部は狭いので余計な部分は削っておかないと配置や配線が大変なので、
ミニブレッドボードの裏面にある突起をニッパーで切り取ります。

ミニブレッドボードに、サーボモータなどのコネクタを取り付けられるように、123と書いてある面を下に、両端ロングピンヘッダを次の配置で差し込みます(下図の■の並びで差し込み)。
〇〇〇〇〇
〇〇〇〇〇
■ ■ ■ ■〇 ・・・ 4pin (※)
■ ■ ■〇〇 ・・・ 3pin
■ ■ ■ ■〇 ・・・ 4pin
123
※ Grove-デュポン変換ケーブルの2.54 mm端子側(黒いほう)にあらかじめピンがついている場合は、最上段の4pinは不要です。

Grove-デュポン変換ケーブルをミニブレッドボードに接続
ブレッドボードの一番上に指した4pinのピンヘッダに対して、Grove-デュポン変換ケーブルを左から次の順番で差し込みます。
※ Grove-デュポン変換ケーブルの2.54 mm端子側(黒いほう)にあらかじめピンがついている場合は、最上段の4pinは不要で直接ブレッドボードに差し込めます。
黒(GND)
赤
黄
白
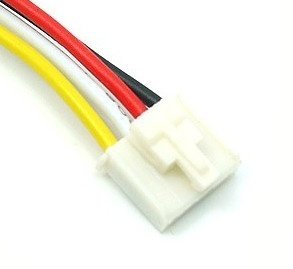
もし、Grove-デュポン変換ケーブルの白い端子側(Grove端子)に下図の様なツメがついている場合は、M5Stackに指すときに邪魔になるのでニッパーなどで切り落とす必要があります。(今回買い物編で買ったやつは爪がないやつだったので、その作業は割愛します)
コンデンサ類のセット
電解コンデンサ 6.3V 220μF と、セラミックコンデンサ 50V 0.1μF をブレッドボードにセットするため、少しリード線が長いので1~1.5cm 位の長さに切っておきます。

下図に示す通り、ブレッドボードに対して★に電解コンデンサ、☆にセラミックコンデンサを差し込みます。電解コンデンサ(筒状の方)は白い帯がある面GNDなので、そちらがブレッドボードの外側になるように差し込みます。セラミックコンデンサ(青いほう)は極性がないので特に気にせず差し込みます。
★★〇〇〇 ・・・ 電解コンデンサ(コンデンサの白帯が外側)
☆☆〇〇〇 ・・・ セラミックコンデンサ
■ ■ ■ ■〇 ・・・ 4pin(M5Stackとの接続)
■ ■ ■〇〇 ・・・ 3pin(垂直方向)
■ ■ ■ ■〇 ・・・ 4pin(水平方向)
123

サーボモーターのセット
ブレッドボードの3pinと4pinに、それぞれ垂直方向と水平方向を稼働させるサーボモーターを取り付けます。4pinの方に、コネクタを取り替えたものを取り付ける点に注意してください。
また、取り付ける際、コネクタの配線色の茶がGNDなので、その色がブレッドボードの外側になるように差し込みます。

これで、スタックチャンの筋肉部分であるサーボモーターとその接続基盤の準備ができました。
次回は、今回組み立てた部品をサーボモータにつないで動作させてみたいと思います。
おまけ:スタックチャンのBodyゲットの巻き
自宅に3Dプリンタもないしなーと悩んでいたら、偶然にもTwitterでマグネット版のBodyが販売されるという情報を見つけたので4/1に浅草橋にある技研ベースで開催された技研フリマにお邪魔してきました。
https://gikenbase.com/blog/649/
@kennel_org さんありがとうございます。大事に育てます。
