
ロボットが、我が家にやってきた。

キックスターターでクラウドファンディングしていた「PLEN:bit」というロボットキットが10連休の前日に手元にとどきました。PLENbitは名前の通りmicro:bitというマイコンボードで動くロボットです。
10連休はいろいろと予定が詰まっていたこともあり、また手軽に作ってしまうのも勿体ないと思い、連休明けの仕事が一段落するまで大切に温存していましたが、ようやく楽しみながら組み上げ、
とうとう我が家にロボット君がやってきました。
ということで、これからやってみたいことを宣言しておきます。
1:みんなでプログラミング
PLEN:bitを動かすのは簡単です。micro:bitのプログラム環境である「MakeCode for micro:bit」というアプリにPlen:bitのライブラリを読み込み、動かしたいようにブロックをつなげるだけでできてしまいます。
micro:bitはもともと小中学生でも使えるように、すぐに作って直ぐに試してみることができるように考えられています。その特徴は大人に対してもいろいろな知識レベルの人が集まって、共同作業でプログラムを作るのにも適しています。
ここで言うプログラミングはコードを書いたりブロックを並べることではなく、実際に動くロボットをみて「どのような動きになればもっと良くなるのか」というアイデアを出し合うことです。
目の前で起きていることが、身体感覚として理解でき、また表現することができるため、言語化、身体化しやすく平等にアイデアが出せるようになります。
このワークショップが上手くいけば、同じ感覚でデジカメや医療機器などの製品に対しても、その振る舞いや役割について、アイデアを出すことができるようになるというのが最終的な狙いです。
UIデザインにおいて必要なコミュニケーションを取り戻したいと思っています。(それに職場でロボットが動いているっていうのは空気として大切だと思っている)

ブロックには、あらかじめ手足の動きを連動させて1つのモーションとしてプログラムしてあるものと、個々のサーボモーターやセンサーを設定していくものがあります。
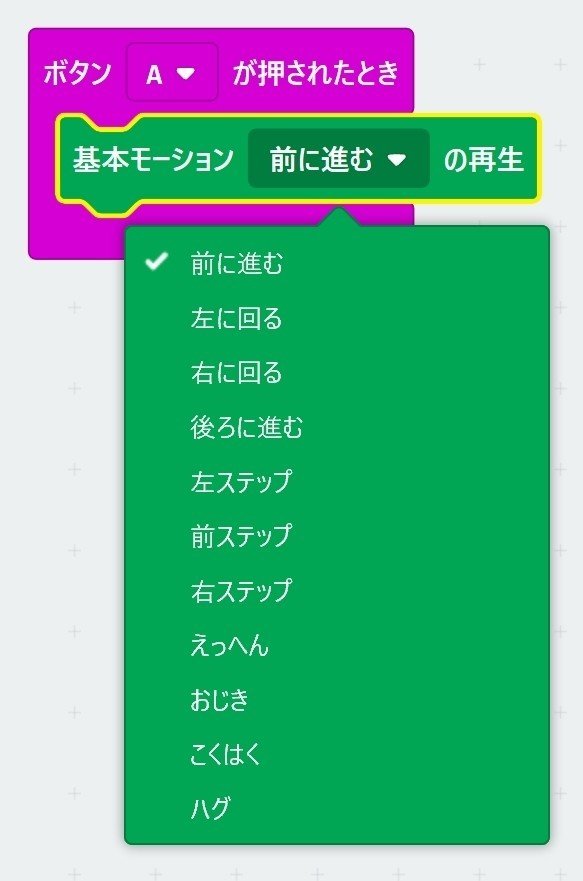


あらかじめ動きがプログラムされているモーション。これをつなげていくだけでストーリーのある動きをつくることができる。

個々のサーボの角度を組み合わせることでポーズを作ることができ、それをつなげていくことでモーションになる。実際にはこれを関数化して呼び出して使っていくことになる。
まだ何も試せていませんが、即興的にプログラムを組んで直ぐに動かしてみるというのを色々な人達とやってみるつもりです。
2:メタルボディに換装
これまで購入したスマホやデジカメには、外装に対して何らかの手を加えてきました。多くは革ケースや3Dプリンターで作ったグリップなどです。
工作が趣味ということもありますが、大量生産された製品に対して「どれだけ愛着を持てるか」ということに興味がありカスタマイズをおこなっています。
かわいいPlen:bitには申し訳ないのですが「ヘビメタ」ボディになってもらおうと考えています。。
アルミ板を切って曲げて、ヤスリで削って手作りしてみるつもりです。
CADで設計して3Dプリンターというやり方もありますが、今回は愛着を増すために手を黒くして作ります。
3:そして写真を撮ってもらう
自由に動きを作ることができるようになったところで「PLEN:bitに写真を撮ってもらう」という計画を持っています。
今年の初めにデジカメのリモートレリーズを使って、ロボット動作でシャッターを切る実験を完了しているので、あとは実際に作って撮影するだけです。

左側のサーボ部についている角度の変化を検知する「傾斜スイッチ」によって1st/2ndレリーズをおこなわせる。
電気回路を組んだり、スマホアプリでシャッターを切れる時代にあえてフィジカルなスイッチによって動作させてみる。
毎年年末に職場のフォトコンテストがあるのですが、そこに応募するのを今年の目標としたいと思っています。
この記事が気に入ったらサポートをしてみませんか?