

記事一覧

四足歩行ロボット進捗④
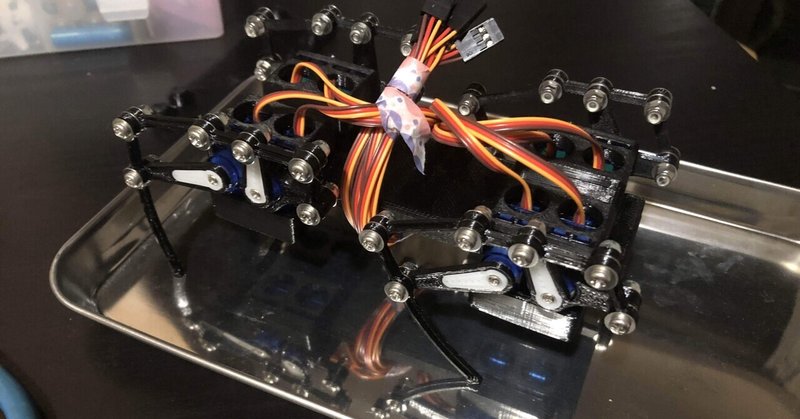
ついにサーボをまとめたタイプの機体一号が完成。
二関節の足x4で8自由度。
肩にあたる回転軸も付けたいけど強度の問題とかつけても動き作るのがそもそもまだできないので。
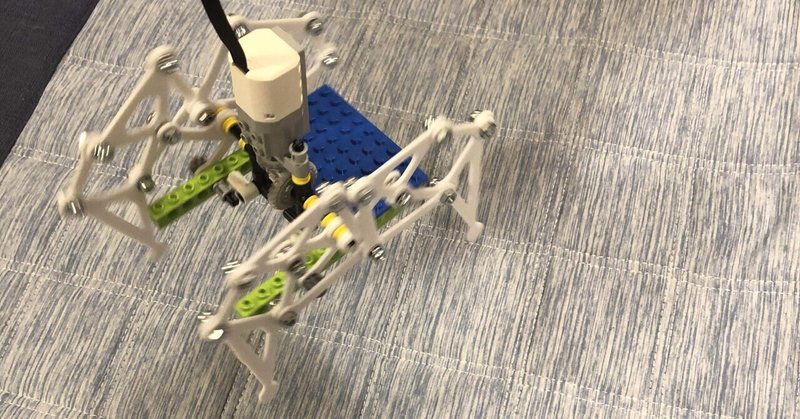
動かしてみる!
単純な動きを作るだけで結構時間がかかる。以下のような問題点
・配線ごっちゃでどのケーブルと何番のピンを対応させるかでこんがらがる
・モーターが安物なので初期値に全部まわしてからもっかい組み立てることになる
・

キャンプで暇だったので竹とんぼを作る
GWにキャンプ中、天気も良くて本も一通り読んじゃったのでぼーっとしていたら急に竹とんぼが作りたくなってきた。
すごく前に小学校の図工で竹とんぼを手作りした記憶がフラッシュバック
&近くに折れた竹が転がっている
作り方を以下にざっくり
①竹をのこぎりかなんかで15㎝幅くらいに切る
②鉈で割る(羽用の幅1.5cmと持ち手用に直径3mmくらいの)
③ナイフで削って竹とんぼの形に
④ロウソクとかで炙り

四足歩行ロボット進捗③
4月色々疲れるので全然進んでないがまとめないと脳みそが次のこと考えられない構造なのでちょっとまとめ。
調べた感じ小型の四足歩行はざっくり4パターンくらいあって、
1)関節すべてモーターのクモみたいなやつ
2)関節すべてモーターの犬タイプ
3)マジックハンドみたいにモーターから足を出してる犬タイプ(Pupperとか)
4)完全オリジナルのとかハイブリッド
予算的とか技術とか作りたいもののバラ
四足歩行ロボットが作りたいのでサーボモーターから始めてみる①
家に犬が来たからなのか、ロボコンの仲間の影響か四足歩行型のロボットが作りたくて仕方ないのでとりあえずサーボモーターの制御から始めてみることにした。
しかしプログラム書いたり電子工作の経験値は0なので、一歩一歩行くことにした。
①とにかくArduinoUnoについないでサーボモーターを動かす(1時間くらい)
ライブラリの追加とかにてこずったけど
servoWriteとdelayと基本の書式を習
四足歩行ロボットが作りたいのでサーボモーターから始めてみる②
前回とりあえずサーボを回せたということで、意外と簡単だなとか思ってたら遠隔で動かすの5時間くらいかかった。
赤外線リモコンを使いたい→参考になるやつないしライブラリのショートカットとかそのまんま使えるスケッチ例がなくて挫折
Blynk→LedのOn・Offはできるけど新しいバージョンになってからスライダーの使い方説明してるのがないしプログラムのどこ替えたらどうなるか量が膨大過ぎてわからんくて挫

四足歩行ロボットが作りたいのでサーボモーターから始めてみる③
前回1個のサーボは遠隔でWebから動かせたので、次は4つということで。
ESP32と普通の9gサーボを使用
前回と同じやつでスライダーを増やす→Servoに値を送るをイメージしてたがスライダーを増やした後どうすれば値を送信できるのかよくわからん。
基盤4つ使うとか力業はしたくないので、2時間くらいの悪戦苦闘の結果このサイトを参考にすることで落ち着いた。
これをLED→サーボ出力に替えるので


PETGフィラメントを試してみた
2年くらい使ってるEnder3proでPLA以外が使ってみたくなったので
AmazonでPETGフィラメントを買ってみた
友達から依頼された六角シャフト用スペーサーで練習
ベッドの温度200℃(PLA)→240℃(PETG)に変更したら他はあんまり問題なくできた
Curaが優秀なのか
ABSとか、blenderも練習中だからもっと複雑なのをためしてみたい!