
タスク駆動型モデルと神経科学: 固有受容感覚の神経活動を予測するニューラルネットワーク

神経回路は適応度を上げるために、特定のタスク(群)をうまく解けるように進化しているはずである。であれば逆に、様々なタスクを解かせるよう学習させたモデルでどれが神経活動を最もうまく説明できるかを比較することにより、脳がどのようなタスクに最適化しているかを明らかにできるのではないか?
固有受容感覚は、脳に対して四肢の位置、動き、力を伝え、様々な行動に必須の機能である。錐体核(Cuneate nucleus: CN)は、脳幹の延髄に位置し、体性感覚経路の上半身の感覚情報を処理する。1次体性感覚皮質(Primary somatosensory cortex: S1)は、触覚、痛覚、固有感覚などを処理する大脳皮質の領域で、CNとともに上行性固有感覚路を形成する。
それでは、固有感覚を入力とする人工ニューラルネットワーク(ANN)を特定のタスクを解くようにトップダウンにトレーニングすることで、CNやS1の固有感覚の活動を予測できる表現を獲得できるだろうか?
本論文は、トラッキング、生体力学的モデル、ANNを用いた表現学習を組み合わせ、固有受容感覚がどのように神経活動にエンコードされているかに関する仮説を検証した。キネマティクスを表象するタスク駆動型のモデルが神経活動の予測性能が高く、能動的に手を動かす際にCN、S1においてトップダウンの入力が重要な働きを担う可能性を示唆した。
Vargas, Alessandro Marin, et al. "Task-driven neural network models predict neural dynamics of proprioception." Cell 187.7 (2024): 1745-1761.
Task-driven neural network models predict neural dynamics of proprioception: Cell

Methods
図1は、ANNを用いたモデルと実験を組み合わせて仮説の生成、検証を行う本研究のアプローチを示している。筋骨格のモデルから人工的に生成した筋紡錘のデータを入力とし、特定のタスクを解かせることで、固有感覚にかかわる神経活動はどのような情報を表象しているかについての仮説を16個作成した(図1A)。次に、非ヒト霊長類であるマカクザルがリーチングを行う際のCNとS1の神経活動データをどのモデルが最もよく説明できるかを比較することで、生成した仮説の網羅的な検証を行った(図1B)。本研究にはタスク駆動型のモデルと比較するために、筋紡錘のデータから神経活動を予測するモデルとして、線形回帰モデル、人工ニューラルネットワーク(ANN)モデル、トレーニングしていないANNの次元削減した潜在空間を線形回帰したモデルを作成した(図1C)。タスク駆動型のモデルは3つ目のモデルのANNを特定のタスクを解くようにトレーニングしたANNで置き換えたものである。

図2は、固有感覚を調べるために今回検証する仮説を提示している。ここでは、固有感覚が手の位置や速度など動きのキネマティクスの表象しているという仮説や、関節を動かすのに必要なトークであるダイナミクスを表象しているという仮説などが含まれる(図2C)。大脳皮質がキネマティクスとダイナミクスどちらを表象するのかは、長年議論の続く重要な問いである。

図3は、固有感覚を調べるためにマカクザルに行わせたリーチングタスク神経活動記録の概要を示している。能動的なリーチング課題と受動的なリーチング課題を数100回行わせ(図3A下)、CNまたはS1から数十神経の活動を記録した(図3A上)。サルは中央から外側へリーチング行動を行い(図3B上: 能動的、図3B下: 受動的)、特定の方向にリーチングしたときのみ活性化する細胞などが得られた(図3C上: 能動的、図3C下: 受動的)。

Results
図4は、タスク駆動型のモデルが神経活動をよく予測できることを示している。タスク駆動型のモデルは、CNやS1の神経活動を高い精度で予測できる場合もあった(図4A)。ただし、図4Bに示されているように、これは最もよく神経活動を予測できた場合であり、平均的には予測精度を表す説明分散(EV)が0~0.2程度であることに注意する必要がある。

図5では、様々なタスク駆動型モデルの神経活動の予測性能を比較した。タスク駆動のモデル(色のついたバー)の性能は、ランダムに初期化したANNを用いたもの(黒いバー)の性能よりも能動的リーチング課題の場合に少し高く、線形回帰のモデル(白いバー)と比べると神経活動の予測精度が能動的、受動的リーチング課題の場合ともに高かった(図5A,C,D,F)。また、キネマティクスを表象するようにトレーニングされたモデル(手や関節の位置、速度を予測するモデル: オレンジ、紫、緑のバー)が最も神経活動を説明できることも分かった。タスクを解くようにトレーニングすることで神経活動の説明精度が上がる場合と下がる場合があることが、潜在空間の可視化により示された(図5B,E)。
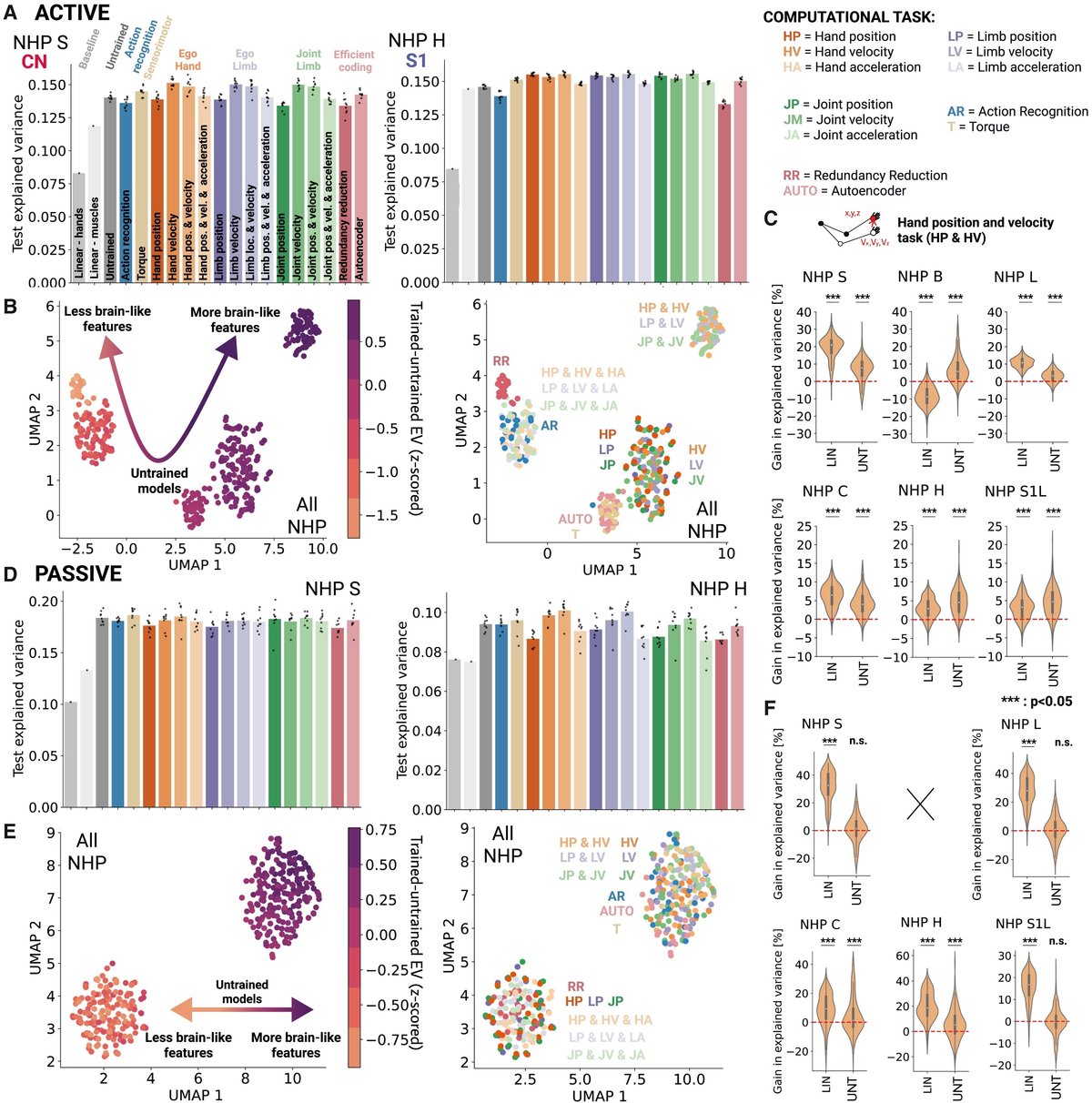
図6は、ANNのタスク性能が神経活動の予測性能と相関があることを示している。能動的・受動的にかかわらず、リーチングタスク中の神経活動を説明するタスク駆動型の多くのモデルで、タスクテスト時のエラーが下がると神経活動を説明できる割合が上がるという関係がみられた(図6G)。これは、生物の神経系と進化的な基盤を共有しないANNを用いたモデルを使用していることを考えると、意外な結果である。

Discussion
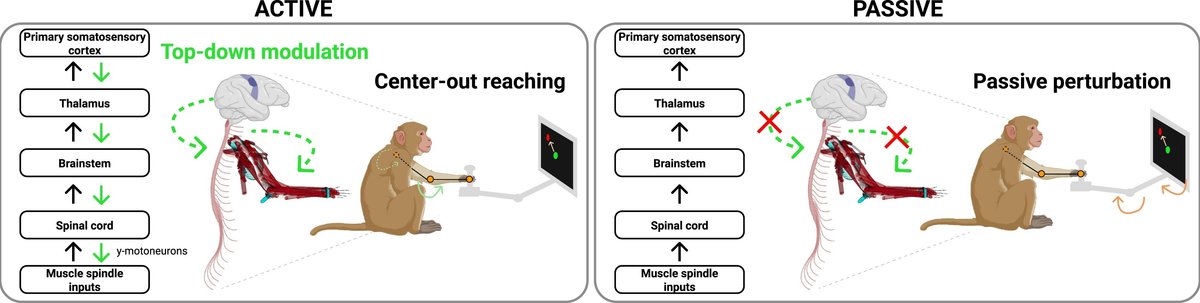
本研究は、タスク駆動型のモデルが受動的なリーチングよりも能動的なリーチング時の神経活動の予測精度が高いことを示していた。この傾向は脳幹に位置するCNと大脳皮質に位置するS1で類似しており、これらの領域が能動的な行動時にM1などから行動に関する情報をトップダウンに受け取っている可能性を示唆している(図7)。
タスクを解ける人工ニューラルネットワーク(ANN)が生物の神経活動を予測できる必然性はないが、この研究はそのような関係性が成り立つことを示している。このような”タスク駆動型モデル”を用いた研究はCNNと視覚野、Transformerと聴覚野や言語関連の領域などでも行われているが、これらの感覚皮質に内在する特性なのか、何か普遍的なANNとBNNの共通特性を表しているのかは今後の研究が待たれる。
まとめ図である図7のタイトルに"possible"が含まれているように、実験的に特定の生命現象に関する結論を出したというよりはモデルと神経活動データを比較することで有力な仮説を提唱したというような研究であり、Cellのようなトップジャーナルに載る研究としては珍しい。今後はデータドリブンに大規模なモデル比較を行い、検証可能な仮説を生成するといった研究が増えてくるかもしれない。
参考文献
Performance-optimized hierarchical models predict neural responses in higher visual cortex | PNAS
Shared computational principles for language processing in humans and deep language models | Nature Neuroscience
神経回路は特定のタスクに適応するよう進化しており、これを逆に利用して脳がどのタスクに最適化しているかを明らかにできる。固有受容感覚は四肢の位置や動きを脳に伝え、行動に必須であり、錐体核や1次体性感覚皮質がこの感覚を処理する。本研究は、タスク駆動型の人工ニューラルネットワークを用いて固有感覚に関する神経活動を予測し、特定のタスクを解くモデルが最も高い予測性能を持つことを示した。
サムネイル画像の出典:Task-driven neural network models predict neural dynamics of proprioception: Cell