
トップレベル大学受験物理[2-Appendix]極座標の運動方程式

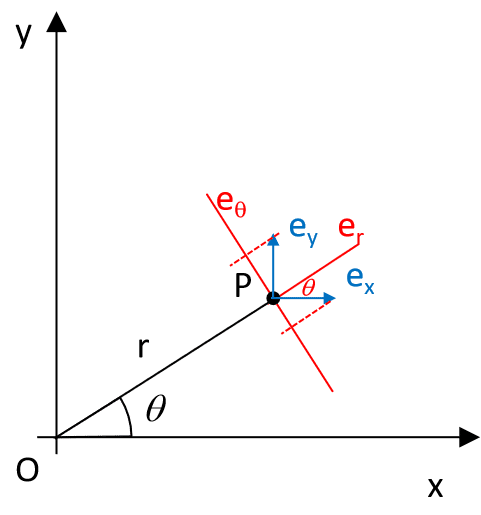
$${x}$$方向、$${y}$$方向の単位ベクトルを$${\bm{e_x}}$$、$${\bm{e_y}}$$とする。図のように、動径方向($${\vec{OP}}$$方向)、角度方向($${\vec{OP}}$$に垂直な方向)の単位ベクトルを$${\bm{e_r}}$$、$${\bm{e_{\theta}}}$$とすると、図より、
$$
\bm{e_r} = \cos \theta \bm{e_x} + \sin \theta \bm{e_y} \\
\bm{e_{\theta}} = -\sin \theta \bm{e_x} + \cos \theta \bm{e_y}
$$
となる。($${|\bm{e_r}|^2=|\bm{e_{\theta}}|^2=1}$$より、$${\bm{e_r}, \bm{e_{\theta}}}$$いずれも単位ベクトルである。)
ここで、
$$
\begin{align*}
\frac{d\bm{e_r}}{dt} &= \frac{d}{dt}(\cos \theta \bm{e_x} + \sin \theta \bm{e_y}) \\
&= -\dot{\theta} \sin \theta \bm{e_x} + \dot{\theta} \cos \theta \bm{e_y} \\
&= \dot{\theta} \bm{e_{\theta}} -----(1) \\
\frac{d\bm{e_{\theta}}}{dt} &= \frac{d}{dt}(-\sin \theta \bm{e_x} + \cos \theta \bm{e_y}) \\
&= -\dot{\theta} \cos \theta \bm{e_x} - \dot{\theta} \sin \theta \bm{e_y} \\
&= -\dot{\theta} \bm{e_r} -----(2)
\end{align*}
$$
$$
\begin{align*}
\frac{d^2 \bm{e_r}}{dt^2} &= \frac{d}{dt}(\dot{\theta} \bm{e_{\theta}}) \\
&= \ddot{\theta} \bm{e_{\theta}} + \dot{\theta} \frac{d \bm{e_{\theta}}}{dt} \\
&= \ddot{\theta} \bm{e_{\theta}} - \dot{\theta}^2 \bm{e_r} ----(3) \\
\frac{d^2 \bm{e_{\theta}}}{dt^2} &= \frac{d}{dt}(-\dot{\theta} \bm{e_r}) \\
&= -\ddot{\theta} \bm{e_r} - \dot{\theta} \frac{d \bm{e_r}}{dt} \\
&= -\ddot{\theta} \bm{e_r} - \dot{\theta}^2 \bm{e_{\theta}} ----(4) \\
\end{align*}
$$
今質量$${m}$$の物体が点Pの位置に存在し、力$${\bm{F}}$$を受けているとすると、物体の位置ベクトル(位置座標)$${\bm{r}}$$は、
$$
\bm{r} = r \bm{e_r} + 0 \bm{e_{\theta}}
$$
と表される。したがって、物体の速度、加速度は、上記$${(1)-(4)}$$を参考に、
$$
\begin{align*}
\frac{d \bm{r}}{dt} &= \frac{dr}{dt} \bm{e_r} + r \frac{d \bm{e_r}}{dt} \\
&=\dot{r} \bm{e_r} + r \dot{\theta} \bm{e_{\theta}} ----(5) \\
\frac{d^2 \bm{r}}{dt^2} &= \frac{d \dot{r}}{dt} \bm{e_r} + \dot{r} \frac{d \bm{e_r}}{dt} + \frac{dr}{dt} \dot{\theta} \bm{e_{\theta}} + r \frac{d \dot{\theta}}{dt} \bm{e_{\theta}} + r \dot{\theta} \frac{d \bm{e_{\theta}}}{dt} \\
&= \ddot{r} \bm{e_r} + \dot{r} \dot{\theta} \bm{e_{\theta}} + \dot{r} \dot{\theta} \bm{e_{\theta}} + r \ddot{\theta} \bm{e_{\theta}} - r \dot{\theta}^2 \bm{e_r} \\
&= (\ddot{r} - r \dot{\theta}^2) \bm{e_r} + (2\dot{r} \dot{\theta} + r \ddot{\theta}) \bm{e_{\theta}} ----(6)
\end{align*}
$$
ここから先は
¥ 500
この記事が気に入ったらサポートをしてみませんか?