
スマートフォンカメラのオートフォーカスについて

はじめに
スマートフォンカメラの高度化に伴い、スマートフォンカメラのオートフォーカス技術も高度かつ複雑なものになった。この記事は、現在のスマートフォンカメラにおけるオートフォーカス技術について整理することで、読者のスマートフォンカメラに対する理解促進を目的とするものである。
基本的なイメージセンサーの構造について
まずオートフォーカスについて触れる前に、前提知識としてイメージセンサーの構造について整理する。
イメージセンサーとは、人の目の網膜の部分にあたり、被写体をセンサーの受光面に結像させ、結像した像の光の明暗を電気信号に変換(光電変換)して、変換した信号を読み出すことで、画像を映し出すことができるデバイスである。
イメージセンサーは数百万から数億の受光素子(画素)の集合体であり、受光素子の数を画素数と言う。またイメージセンサーのサイズをセンサーサイズ、画素1つ1つのサイズをピクセルサイズと呼ぶ。
センサーサイズが一定の場合、原則として画素数が多いほど解像度が上がる一方で、ピクセルサイズは小さくなるため、画素1つ1つの受光量が減少し感度は低下してしまう。従って画素数とピクセルサイズのバランスが重要であり、現在スマートフォンカメラの画素数は、デジタルズームを考慮しない場合1200万画素程度で十分であると考えられている。尚、実際にはデジタルズーム性能が求められることや、後述するクアッドベイヤーという技術の関係上、現在スマートフォンの広角カメラにおいて主流な画素数は5000万画素前後である。
イメージセンサーは主に「オンチップレンズ(On Chip Lens, OCL)」「カラーフィルター」「フォトダイオード(PhotoDiode, PD)」の3層で構成されている。オンチップレンズで集められた光をカラーフィルターによって色(波長)ごとに分離し、その光をフォトダイオードで電荷に変換・転送することで光を電気信号に変換している。

クアッドベイヤー(Quad Bayer)について
本題へと入る前にもう1点、近年のスマートフォンカメラについて語る上では避けることの出来ない技術である、「クアッドベイヤー」について触れたい。
イメージセンサーのサイズが一定である場合、画素数を上げ高解像度を実現しようとすると感度が下がるため、高解像度と高感度を両立させることは難しい、というのは先述した通りである。このような問題に対する解決策として挙げられるのがクアッドベイヤーと呼ばれる技術である。
クアッドベイヤー配列では一般的なベイヤー配列とは異なり、高画素数のイメージセンサーにおいて隣接4画素に同色のカラーフィルターを配置。そして通常撮影時は隣接する4画素を1つの画素として扱うこと(ピクセルビニング)で高感度性能を高め、デジタルズーム時など高解像度が求められる場合には、配列変換処理(リモザイク)を行い通常のベイヤー配列に戻すことで、高画素数センサーとしての強みを発揮する。



オートフォーカス(Auto Focus, AF)について
ここからが本題である。オートフォーカスとは、カメラの焦点を自動的に合わせるシステムのことであり、アクティブ方式とパッシブ方式の、大きくわけて2種類が存在する。更にパッシブ方式のAFはコントラストAFと位相差AFの2種類に大別される。
コントラストAF(Contrast AF, CAF)
コントラストAFとは、撮像素子に映った映像をもとに、ピントレンズを動かしながら明暗差(コントラスト)が大きなところを探してピントを合わせる方式である。
コントラストAFは、通常の位相差AFのように専用の部品を必要とせず、低照度環境での動作を得意とする一方で、位相差AFに比べAF速度が遅いという欠点を持つ。
位相差AF(Phase Detection Auto Focus, PDAF)
位相差AFとは、レンズから入った光をセパレータレンズで2つに分けて専用のAFセンサーへと導き、その2つの像のズレを基にピントの方向と量を判断する方式である。

像面位相差AF
通常の位相差AFは、専用のレンズとセンサーを必要としているため、スマートフォンカメラのような小型カメラに採用するには不向きな仕組みである。
そこでイメージセンサー(像面)に位相差AFの機能を持った画素を配置し、限られたスペースで位相差AFを実装できるようにしたものが像面位相差AFである。
遮光幕を利用した像面位相差AF
像面位相差AFの基礎的な方式として、遮光幕を利用したものがある。この方式では、近接して配置した右半分を遮光した画素と左半分を遮光した画素の1組を、位相差AFに使用する(位相差検出用画素)。右半分を遮光した画素と左半分を遮光した画素、それぞれに映し出される像のズレを基にピントの方向と量を判断する。

2×1 OCL
2×1 OCLは、1つのOCLを2画素で共有したものを位相差検出用画素として使用する方式である。左右の画素に映し出される像のズレを基にピントを調整するという基本的な仕組みは遮光幕を利用する方式と同様だが、遮光幕を用いないためより多くの光を取り込むことができ、暗所でも高い精度の位相差AFを実現できるというメリットがある。

Super PD
Samsungは2×1 OCLをクアッドベイヤーセンサーに採用した方式をSuper PDと呼んでいる。またSuper PD比で位相差検出画素を2倍に増やし、AF性能を向上させた技術がDouble Super PDである。

全画素AF
位相差検出用画素は多いほどAFの精度が向上する一方、通常の像面位相差AFでは位相差検出用画素を撮像用画素として使用することはできないため、位相差検出用画素を増やすとAF性能が向上する代わりに画質は劣化してしまい、減らすと画質が向上する代わりにAF性能は低下するというジレンマを抱えている。
このような欠点を克服し、撮像用画素の全てを位相差検出用画素としても使用できるようにした仕組みが全画素AFである。

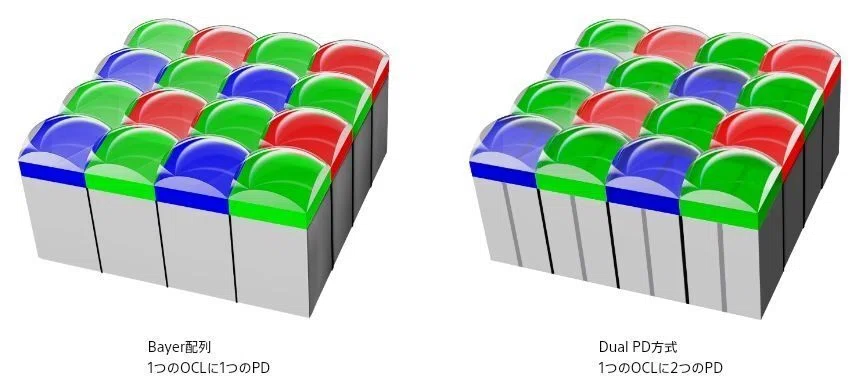
Dual PD(Dual Pixel)
Dual PD方式は全画素AFの基本方式である。Dual PD方式では、1つの画素を左右2つのPD(フォトダイオード)に分割する。この時、OCL(オンチップレンズ)を共有する構造にすることで左右のPDに別々の入射光が入るため、位相差を取得することができる。画像信号として使う際は、左右のPDの情報を足すことで位相差の影響を打ち消す。Dual PDはSonyの技術だが、同様の技術をDual Pixelと呼ぶこともある。
Dual Pixel Pro
Dual PD(Dual Pixel)方式の発展形として、緑色の画素を斜めに分割し、左右だけでなく上下の位相差も同時に比較できるようにしたことで、AF性能を向上させた技術がDual Pixel Proである。
2×2 OCL
2×2 OCL方式は、クアッドベイヤーセンサーをベースに、1つのOCLを同色4画素で共有する構造を採用している。この方式では、Dual PD方式の「画像信号として使う際の左右のPD出力の加算」が不要なため、ピクセルビニング時は後述するOcta PD方式よりも解像度を高めやすい。一方で通常のクアッドベイヤーセンサーに比べリモザイクとの相性が悪く、デジタルズームにはあまり適していない。2×2 OCLはSonyの技術だが、同様の技術をQPDと呼ぶこともある。

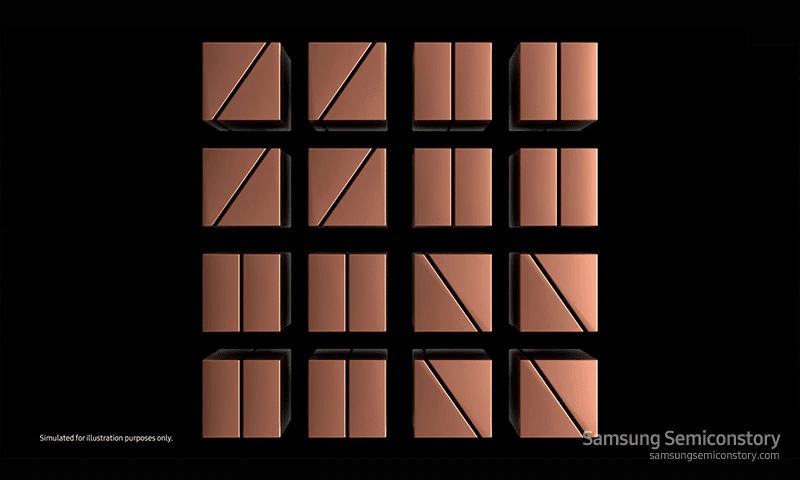
全画素AFを捨て、クアッドベイヤーセンサーの一部にのみ2×2 OCLを採用することもある。このようにすることで、AF性能を犠牲にデジタルズームの性能を向上させることができる。中華スマートフォンのペリスコープ望遠カメラに多用されているOV64Bはこの方式である。

右:全てに2×2 OCLを採用し、全画素AFを実現
Octa PD
Octa PD方式は、クアッドベイヤーセンサーに対してDual PD方式を掛け合わせた技術である。クアッドベイヤーセンサーの、高感度と高解像度を両立できる長所に加え、全画素AFによる優れたAF性能をも実現できる。全画素AFの最も先進的な方式と言えるが、現段階において小型化は難しく、IMX989やLYT-900といった、モバイル向けとしては大型なイメージセンサーにのみ採用されている方式である。

レーザーAF(Laser AF, LAF)
アクティブ方式のAFである。被写体にレーザー光線を当て、その反射の状況を検知して対象までの距離を測り、写真のピントを合わせる。暗い場所でもピントを合わせることが可能な反面、被写体との間にガラスなど透明な板がある場合に距離検出を誤ることがある。また風景写真など被写体が遠距離にある場合は、反射波がカメラまで届かない、或いは届いても微弱なために、ピントを合わせにくい。
LiDARセンサー・ToFセンサー
iPhoneのProモデルやiPad Proに搭載されているLiDAR(Light Detection And Ranging、光による検知と測距)センサーや、Androidスマートフォンに搭載されているToF(Time of Fligh、光の飛行時間)センサーがAFのために用いられる場合、基本的な仕組みはレーザーAFと同様である。しかし、例えばiPhoneのLiDARセンサーは、AF以外にもポートレートモードで撮影する際に深度情報を取得するために用いられたり、ARコンテンツを利用する際に用いられたりするため、LiDARセンサーやToFセンサーはレーザーAFシステムの拡張版と見なすことができる。
固定焦点(Fixed Focus, FF)
固定焦点とは、ピントを合わせる機構を持たず、あらかじめ適当な位置でピントを固定してあるレンズやカメラのことである。マクロ撮影では被写体との距離がある程度固定されているため、安価なスマートフォンのマクロ撮影専用カメラは固定焦点になっていることが多い。
参考サイト
Wikipedia オートフォーカス
キャノン公式HP
ソニーセミコンダクタソリューションズグループ公式HP
シャープ公式HP
Samsung公式HP
OmniVision公式HP
itmedia「コントラスト」「位相差」2つのAFを理解する
ケータイWatch「Xperia PRO-I」で採用、像面位相差オートフォーカスとは
この記事が気に入ったらサポートをしてみませんか?