
【レポート】UR協働ロボットフェア2024

協働ロボット・ユニバーサルロボット(以下UR)のプライベート展示会へ行きました!
私はURユーザではないですが、協働ロボットの知見が乏しく、これは絶対行くべきだと思い即決しました。
目的は以下の3点になります。
・協働ロボットが目指そうとしている市場や技術領域を知る事
・協働ロボットの導入ハードルの低さを知る事
・センサ、ロボットビジョンなど周辺機器の調査
それでは、いきましょう!
イントロダクション
展示内容: UR協働ロボットフェア 2024
テーマ: 協働ロボットの最新情報と周辺機器のデモ
開催日時: 2024年4月23日 (火) 09:30 - 17:00
開催場所: 東京都立産業貿易センター 浜松町館
主催者: ユニバーサルロボット日本支社
この展示会では、6種類すべてのURロボットを用いたデモが行われ、16のセミナーと初出展9社含む21社の周辺機器が大集合します。
協調ロボット単体だけでなく、どんな周辺機器があるか、どんな用途で活用されそうか、など周辺をまるごと情報収集ができます!
今回はじめての参加で、数多くの革新的な技術と製品が披露されましたが、特に注目すべきいくつかのハイライトを以下に紹介します!
ハイライト1:直感操作で用途拡大
従来はマシンテンディングやピック&プレイスが主要な用途でしたが、そのほかのアプリケーション拡充の流れが感じました。
研磨、塗装、磨きなど従来人の感覚で行われた作業を協働ロボットに置き換える提案が目立ちます。
NordboRobotics社「Mimic Platform」
概要:
Mimic Platformは、Nordbo Roboticsが提供するモーションベースのロボットプログラミングツールです。ユーザーの動きを直接ロボットに転送し、専門的なプログラミングなしにタスクを自動化します。
詳細リンク
特徴:
直感的操作: 操作者の動きを直接ロボットに記録し、それを基にタスクを自動化するため、専門的なプログラミングスキルは不要。かつ自然な動きを再現できる。
多様なセンサーとトラッカー: IRトラッカーやFTトラッカーなど、様々なセンサーを用いて人間の動きを正確に捉え、それをロボットが学習します。
広範なアプリケーション: 塗装、研磨、バフ研磨など、複数の工程での使用が可能で、特に表面処理の自動化に効果的。
業界への影響:
製造業における労働力不足の問題に対する一つの解決策として注目されています。この技術により、熟練工が直接ロボットを教育することで、品質を維持しながら省人化が実現できる。また、従来のプログラミングに頼ることなく、より迅速かつ柔軟に生産ラインの変更や改善が行えるようになるため、製造業の現場で導入がしやすそうです。
デモンストレーション:
スティックをもって動かせばロボットが同期的に動作します。
スティック先端がロボットのツールセンターポイントになっていて、位置や向きを変えれば追従するのがわかります。
ハンドツールには研磨機器がついていて、反力を吸収できるクッション機構になっていました。多少の位置ズレはあるみたいなので、その対策をメカ側で施していました。
【URフェア】
— あるぱか (@AlpacaRobotics) April 23, 2024
ミミックのシンクロ率高い!
熟練工の人間の感覚を再現する提案が目立つ。#Universalrobot pic.twitter.com/U2qpbCHVdf

MOTION LIB社「URH (Universal Robot Haptics)」
概要: URHは、慶應義塾大学発の「リアルハプティクス®」技術を活用し、繊細な力加減を必要とする作業をロボットで自動化するシステムです。
特徴:
感触伝達: 遠隔操作でのリアルタイムの感触伝達を可能にする。押し当て量がリアルタイムに伝達され人間はフィードバックできる。
直感的操作: リーダー/フォロワー式の遠隔操作で、操作者が直接ロボットを動かし、反対側のロボットが同期して動きます。
多用途対応: 研磨、バリ取り、食品盛り付けなど、広範な用途に適用可能です。
写真は展示会のデモ機です。教示ロボットを直接動かして加工ロボットが同期します。そのとき反力が加工側から教示側へリアルタイムで伝達されるという仕組みです!

業界への影響:
URHは、危険な作業の安全な遠隔操作や技能継承の問題を解決することで、作業の効率化と安全性の向上の点で期待できそうです。
例えば溶接作業や高温の鋳物を扱う現場のような3K作業(きつい、きたない、汚い)を遠隔で操作させて過酷な環境から解放させられる。
デモンストレーション:
デモをやってみたが完全に同期しているし、本当に押し当て量が伝わってくる!どんな理屈なのかサッパリなんだが、これなら研磨のティーチングができそうと感じました(多少の慣れは必要だと思う)。
デモのような研磨作業は、押し当て力や軌道が肝心で、人間の熟練範囲のため数値化がしづらいです。
そこを数値化せず直感操作するので一気にハードルが下がるので導入はしやすそうですね。
ハイライト2:PLCレス!立ち上げ工数削減
ユニバーサルロボット製協働ロボットの周辺機器プラットフォーム「UR+」製品として認証した外部機器の展示がほとんどを占めていました。
その中でも、特に目立ったのは、外部機器をロボットに繋げるだけで、簡単に設定ができる提案でした。
PLCを介さず、制御はすべてペンダント内で完了、立ち上げ工数削減の恩恵が得られます。
【URフェアレポート】
— あるぱか (@AlpacaRobotics) April 24, 2024
立ち上げ工数削減の工夫
サードパーティのUR+認証の外部機器の展示がほとんどを占めていて、立ち上げ工数削減の恩恵をアピールしている。PLCを介さず、ロボットコントローラ内だけで制御が成り立ち、立ち上げも簡単。… pic.twitter.com/Y7N6d13Gpo
Oriental Motor 「DGIIシリーズ」
概要:
DGIIシリーズは、UR専用のロータリーアクチュエータです。
詳細リンク

https://x.com/AlpacaRobotics/status/1782971022939209890
https://twitter.com/AlpacaRobotics/status/1782971022939209890
MONOistの記事でも取り上げられていました。
DG IIシリーズはユニバーサルロボット製協働ロボットに接続された周辺機器を操作、設定するプラグインソフト「URCap」に対応しており、ロボットコントローラーとDG IIシリーズのドライバーをEthernetケーブルでつなぐことで、テーティングペンダントでロボットとロータリーアクチュエーターの通信設定や位置、速度のパラメータ設定、ロボットと連動した動きの制御を設定ができる。
特徴:
①精密な位置制御: 高度な位置決め操作が可能。
②URCap対応: ユニバーサルロボットのURCapで簡単に統合できる。
③イーサネット対応: ネットワーク経由でのコントロールが可能。
所感:
ロボットのプログラミングと操作がかなり簡単になりそうです。
なぜなら、外部軸含めたロボット制御すべてをペンダント内で管理できるからです。従来ではロボットと外部軸を連動させるためには、PLCを介して調整します。
その場合、PLCを理解している制御マンが必要になって、なかなかいない人材です。PLCを介さないことでそこのハードルを下げて、かつ工数削減が望めそうです。
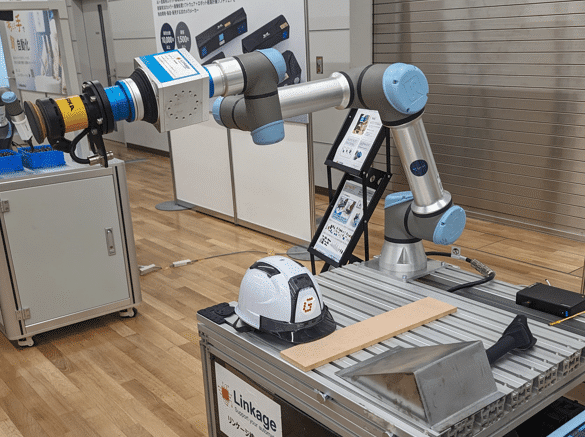
IGUS 「7th axis for robots(軽量ロボット用走行軸)」
igusは軽量タイプのURに対応する走行軸ユニットを拡大していました。
詳細:https://www.igus.co.jp/robolink/7-axis-for-robots

特長:
・ストローク長:最大6M
・精度:±0.3mm 最大速度0.6m/s
・ドライリン(樹脂)構成のためメンテナンスフリー
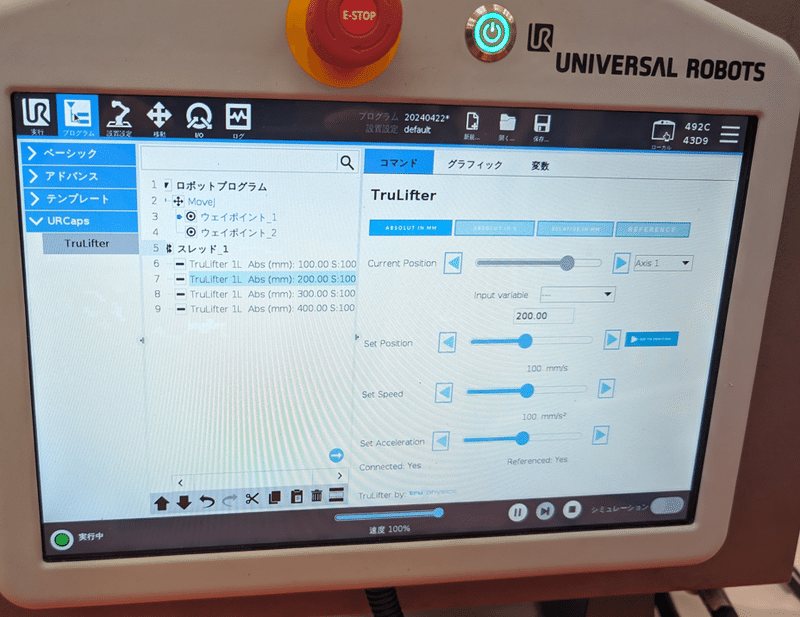
・走行軸制御のすべてをティーチングペンダント内で
・Configurator ページにて簡単に機器構成を作れる
関連ページ:https://robot-configurator.igus.eu/gb/en/7thaxis
感想:
こちらもオリエンタルモータ同様、外部軸をPLCを介さずにロボット管理しているため、工数削減効果があります。
ペンダント内で走行軸の設定ができる(下の写真)。
走行軸ユニットをパッケージで販売している会社は多数あるが、イグスはさらにロボットとの親和性が組み合わされるのがGOOD.
樹脂製なので精度はどうしても妥協しなければならない。
あと手で持てるぐらい軽量だから開発用途で重宝しそうだ。
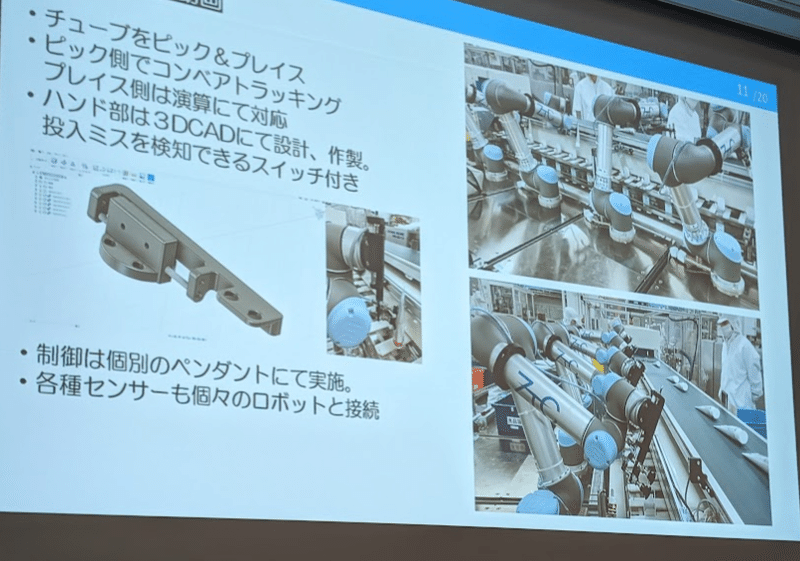
複数メーカーのロボットに対応しているとのこと(下図)だが、より高い重量のロボットまで拡大してほしい。

ハイライト3:ロボットビジョンxAI
3次元カメラの展示が多数ありました。
Mech-Mindは使用経験がありますが、今回もっと面白いロボットビジョンに出会えたので紹介します!
AIロボットビジョン「Cambrian Vision System」
「Cambrian」は製造業向けのAI強化ロボットシステムで、ばら積み、挿入、部品組立などの複雑なタスクを自動化します。
ユーザはCADデータをアップロードさえすれば、あとはAIエンジンが自動で学習し、高性能カメラを使用してロボットを制御します。
詳細はこちらのリンクで確認できます。


特長を説明する前に、まず3次元カメラの予備知識を説明させてください!
三次元カメラのタイプ別比較
3次元カメラは「点群系」と「画像処理系」の2方式に大別されます。
MechMindのようなカメラは点群系はレーザ光源とカメラ一個で構成され、レーザを照射されたワーク表面の縞模様をカメラで見て形状を検知します。

Cambrianは画像系で、カメラが二つあり、複数角度からワークを見ることで形状を読み取ります。

つまりカメラの構造そのものが違います。
<点群系の課題>
・外乱工の影響をうけやすい
・光沢、透明ワークの検出が苦手
・アルゴリズム作成など人による工数が膨大
・AIソフトがあるが、ユーザ自身が主導で学習させるため膨大な時間がかかる
Cambrianはすべての課題をクリアしているので、ロボットビジョンの革命的存在になる予感がします。具体的には以下のとおりです。
Cambrianの強み
外乱光の影響 →受けない、暗所、太陽光でも問題なし。
光沢、透明体のワーク検出→OK
学習工数:ユーザ自身はCADモデルをインプットするだけ。あとはソフトが10~18時間かけて自動でAI学習させる。
アルゴリズム作成工数:AIにお任せだからUser側で作りこみが不要
下図講演のスライドのとおり、特に工数削減効果はSIerにはありがたい。

技術セミナーの参加
技術セミナーをいくつか参加してきました!
製造メーカ生産技術がロボットシステム内製プロジェクトを立ち上げ、協調ロボットの試行錯誤を生の声で聴けたのは貴重でした!
コボットの立ち上げの容易さ効果で、SIerに依存せず現場主導で内製化できることが理解できました。
従来は、専用機や産ロボといった専門性の高い装置はSIerに丸投げせざるを得ず、品種切り替えによる改造やトラブルがあったらSIer任せになっていたようです。
そうすると、余計にお金がかかったり、どうしても対応が遅かったりする。
でもユーザフレンドリーなコボットが普及し、内製化が進む、つまり自分たちで面倒が見れるスキル経験があれば、現場で課題解決するし、社員がどんどんレベルアップしていく。
そこで一つ疑問が、、
「内製化が簡単になる世界で、我々装置メーカーの立場は?仕事が減っていくのか?」
その疑問をXで投げたところ、様々なご意見を頂いたので共有します!
・社内でも出来るという新しい選択肢で、自動化できる領域が広がる
— ユニバーサルロボット (@urrobotjapan) April 25, 2024
・SIer様は専門性を活かした高付加価値システム、または導入しやすいパッケージシステムの開発ができ、ユーザー様のメリットが増える
と良いなと思っております!
来場ありがとうございました!
— ダイラク_コウイチロウ (@Dairaku_Gimatic) April 25, 2024
私見ですが、SIer・装置メーカーさんの仕事は減らないと思います。
ユーザーさん自身で出来る内容が増え、自社特有の用途は内製が進み、
より難易度が高い・専門性が高い案件、社内工数がかけられないものが外部へ、
といった自動車・飲料などのOEM同様の方向性かと。
なるほど。
我々SIerは高い専門性、高い付加価値のある技術・サービスに集中できるということで、むしろ新しい仕事が生まれるということですね!
その分高い技術力が求められるので競争が厳しい側面がありますが。
総括
以上報告でした!
この展示会を通して、協働ロボットの可能性を体感できました。
もう産ロボのような専門知識がいらなくなって、「だれでもロボットが触れる、作れる」という世界線に突入している、そんな未来が見えました。
協調ロボットの普及が今後確実に増えてきます。
引き続きウォッチしていきましょう。
この記事が気に入ったらサポートをしてみませんか?