
保険適用手術の種類 -work.05-

下の表は、「診療報酬の算定方法の一部を改正する件(告示) 令和2年厚生労働省告示第57号 医科点数表 手術 第1節 手術料」を参考に、保険適用となっている手術区分(種類)及び手術料が設定されている項目数について私なりにまとめてみたもの。
例えば、以下の場合。
K655-2 腹腔鏡下胃切除術
1 単純切除術 33,850点
2 悪性腫瘍切除術 64,120点
⇒「K655-2 腹腔鏡下胃切除術」を手術区分(種類)、「1 単純切除術」及び「2 悪性腫瘍切除術」を診療報酬点数区分としてカウント。

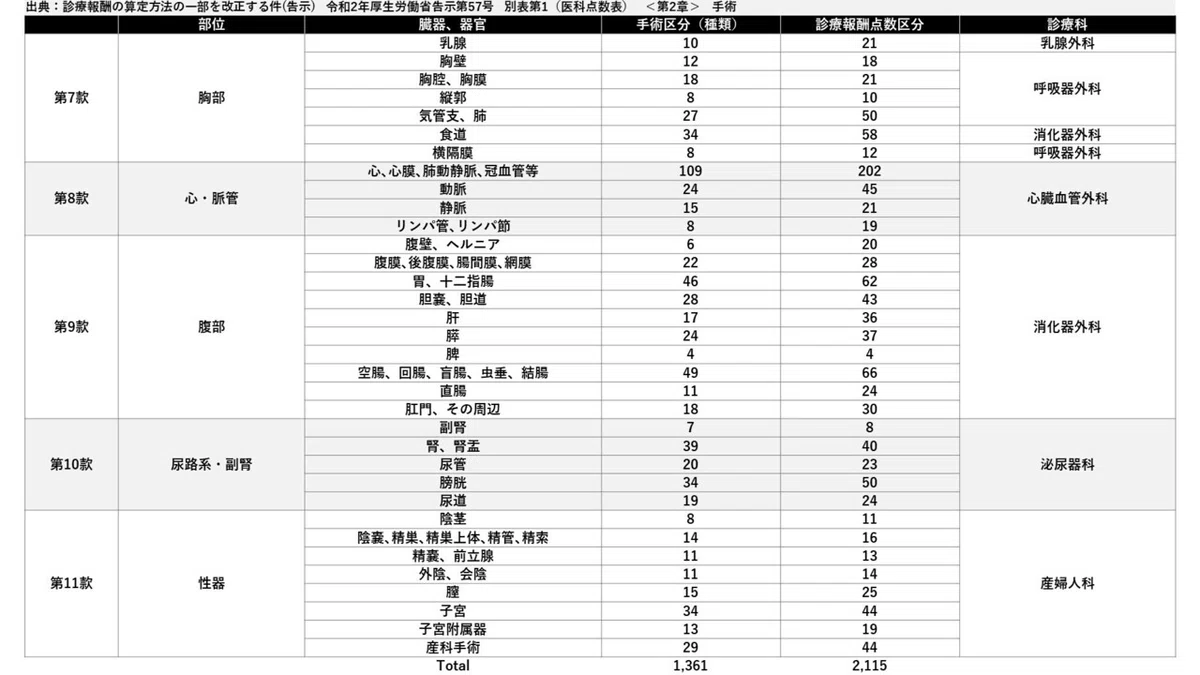
現在保険適用されている手術区分(区分番号:K000~K915)は、私調べて全1,361種類、診療報酬点数区分はさらに約2,100あまりの項目に分類され、この項目全てに公定価格として手術料が設定されている。
手術料は医科点数表(診療報酬の算定方法の一部を改正する件(告示) 令和2年厚生労働省告示第57号 医科点数表 手術 第1節 手術料)に記載され、手術種類には開腹手術、鏡視下手術(腹腔鏡下、胸腔鏡下)、ロボット手術(内視鏡手術用支援機器を用いるもの)などが含まれている。
https://www.mhlw.go.jp/content/12400000/000603762.pdf
保険適用手術を整理する中で、ロボット支援下内視鏡手術についても調べてみた。
1.内視鏡手術支援におけるロボット市場
現在の市場は、米国インテュイティブ・サージカル社(製品名:da Vinci Surgical System)が世界のマーケットを席巻。これに追随する企業としては、米国トランスエンテリックス社(製品名:Senhance Digital Laparoscopy System)、そして国産初の手術支援ロボット「hinotori surgical robot system」を取り扱うメディカロイド社(川崎重工業とシスメックス社の共同出資)などが存在する。
近年、手術支援ロボットの開発競争が激化している。背景にあるのは、世界市場で圧倒的なシェア(7割程度?)を占めるda Vinciの特許切れである。2019年頃での大半部分の特許切れにより、参入障壁が緩和され、今後、益々新規参入企業は活性化してくることが予想されている。
国内市場に目を向けると、世界の手術用ロボット市場において米国に次ぐ2番目の規模にあり、2009年11月に”da Vinci”が認可されて以降、2019年5月に”Senhance”が厚生労働省からの承認を取得(同年7月から保険適用)。また、2020年8月には”hinotori”も製造販売承認を取得している(同年9月から保険適用)。
2.保険適用のロボット支援下内視鏡手術
下記表は、保険適用となっているロボット支援下内視鏡手術及び保険収載年度をまとめたもの。
現在、ロボット支援下内視鏡手術は5診療科21件で保険適用となっている。ただし、ロボット手術加算(内視鏡手術用支援機器を用いるもの)が付いているものはわずか2件(腹腔鏡下前立腺悪性腫瘍手術、腹腔鏡下腎悪性腫瘍手術)のみであり、残りの19件については、通常の内視鏡下手術と同値の手術料に設定されているのが現状である。

また、先に述べた3社が取り扱う各製品の保険適用範囲について記載する。"da Vinci"は記載した21件全てで、"hinotori"は泌尿器科領域に限定しての保険適用となっている。ただ、"Senhance”については、”da Vinci”や”hinotori”よりも圧倒的に広範であり、一般外科、婦人科、泌尿器科、小児科における腹腔鏡手術の全てとなる98疾患が保険適用となっている。
3.各社製品特徴

◆da Vinci Surgical System
<機能性>
・本体から4本のアームが伸びた構造をしており、術者がコンソール(操作卓)をのぞき込む形で操作を行う。
・先端の鉗子などはda Vinci専用の器具を用いる。
・関節数が豊富なアームや専用鉗子によって腹腔鏡手術では非常に高難度な術式でも、精緻かつ安定的に手術を行えるのが強み。
・触覚の感知・フィードバックがないというのは弱点。
<コスト>
・非常に高価。本体価格(Xi:約3億円)及び年間のメンテナンス費用(約2千万)。
・使用する先端の鉗子なども専用器具となり高価。
<保険適用>
・21件(ロボット支援下内視鏡手術 保険収載分)
<利便性>
・大型。手術室の稼働率に影響を与える可能性も。
<使用条件>
・施設基準あり。施設基準の取得が厳しい症例も多数。

◆Senhance Digital Laparoscopy System
<機能性>
・独立した3つのアームと3Dカメラを搭載。術者は離れたコックピットで遠隔操作を行う。
・コックピットでの鉗子操作がda Vinciとは逆向き(ミラーイメージ)になるため、da Vinciの使用に慣れていると、操作に戸惑う場合もあり。
・触感機能を持つ。鉗子先端にかかる張力や圧をコックピット内の術者の手に伝える触感機能があることで、縫合時の糸の引っ張り具合いを感じ取れ、鉗子が臓器に接触している感触も伝わることで、臓器損傷のリスクの軽減につながる。
・その反面、触角のフィードバックがある分、関節がダヴィンチより1つ少ないという問題もあり。
・視線追跡装置を搭載しているため、術者の目の動きでディスプレーに映る内視鏡映像を切り替えられる。(da Vinciは覗き込む必要があるが、メガネ型デバイスによって姿勢の固定負担がない分、術者の背中への負担は軽減できそう)
<コスト>
・ランニングコストが抑えられる。手術1回当たりのコストを従来の腹腔鏡手術と同等に維持する上で役立つリユーザブルインスツルメントを標準としている。つまり、既存の腹腔鏡で用いられる硬性鏡、トロカール、鉗子などがリユース使用できる。
<保険適用>
・一般外科、婦人科、泌尿器科、小児科における良性疾患および悪性疾患の98種類全ての腹腔鏡手術の保険適応が認められている(従来の腹腔鏡手術と同等の手術料)
・腹腔鏡手術として保険収載されている術式であれば全て保険診療として行えるのは、保険適用上、腹腔鏡として扱われているため(保険適用の対象となる手術は日本のあらゆる腹部ロボット手術プラットフォームの中で最も広範)
<利便性>
・大型。使用する上で、オペ室の広さも考慮する必要がでてくる。
<使用条件>
・da Vinciなどに課される施設基準は適用されない。腹腔鏡手術を実施できる施設であれば、術者がトレーニングを行えば手術を行える。

◆hinotori Surgical Robot System
<機能性>
・4本のアームを備えたオペレーションユニットと、操作設備のサージョンコックピットから構成。
・違和感なくスムーズな操作が可能。4本のアームは、左から2番目に内視鏡カメラが設置され、その右側と左側にロボット鉗子を装着。一番右端のアームには、手術中に組織などを掴む手術器具を装着。つまり、人体の構造同様、中央に視点が確保され、右手と左手でロボット鉗子を操る形をとっている。
・アームの太さは人の腕ほど細く、8つの関節を持ち、動作の自由度が高い。また、アーム同士やアームと手術台横の助手がぶつからないよう制御されている。
・動作状況をモニタリングするネットワークサポートシステム「Medicaroid Intelligent Network System( MINS)」を標準装備。手術中にロボットが正常に作動しているかを外部からチェックでき、リモートサポートによるトラブル解決が可能。また、5Gの普及とともに遠隔治療や遠隔手術も今後視野に入ってくる。
・サージョンコックピットでは、高精細な3Dの内視鏡画像を見ながらオペレーションユニットのアームを操作。
<コスト>
・本体価格は不明。ダヴィンチの半値程度?
・リースプランや1症例毎の支払いパターンもあるかも不明。
・年間メンテナンス費用も不明。
<保険適用>
・対象は、ロボット支援下内視鏡手術における泌尿器科領域。
<利便性>
・小型サイズで移動しやすい。
<使用条件>
・da Vinci同様に施設基準あり。
4.次回のOutputに向けて
今回のOutputでは、ロボット支援下内視鏡手術を含めた保険適用手術などについてまとめてみた。次回からは、手術の定義や種類、その上での具体的な手術の術式などについても踏み込んでいきたい。
お読み頂きありがとうございます。もしよろしければサポートお願いしますm(__)m 頂いたサポートは、クリエイターとしての活動費(かけっこ教材などの運営費etc)に使わせていただきます!