Diffusion Modelを活用したカメラ画像の深度推定

この研究論文は、単眼カメラ画像からの距離推定に関する最新のアプローチについて記述しています。研究者たちは「Zero-Shot Metric Depth with a Field-of-View Conditioned Diffusion Model」という新しい手法を提案しています。この手法は、屋内と屋外の両方のシーンを共同でモデリングすることに焦点を当てており、従来のアプローチよりも優れた結果を示しています。
文献情報
タイトル:Zero-Shot Metric Depth with a Field-of-View Conditioned Diffusion Model
著者:Saurabh Saxena, Junhwa Hur, Charles Herrmann, Deqing Sun, David J. Fleet(Google DeepMind, Google Research所属)
出版日:2023年12月20日
背景と課題
この論文のタイトルは「Zero-Shot Diffusion Model」といい、Google DeepMindとGoogle Researchの研究者によって書かれました。論文は、単眼カメラを使用しての距離推定、特に「ゼロショット」メトリック深度推定の課題に対処しています。これは、カメラの内部パラメータが未知である状況において、画像から正確な距離を推定することを目的としています。
従来のアプローチでは、屋内または屋外のシーンに特化したモデルを使用していましたが、これらのモデルは一般的なシーンに対応できないことが多かったです。さらに、既存のモデルは、特定のカメラの内部パラメータに過度に適合し、未知のカメラや異なる状況に対してはうまく機能しないことがありました。
論文のメインアイデア
論文「Zero-Shot Metric Depth with a Field-of-View Conditioned Diffusion Model」では、モノクロ画像からの距離推定のための新しい手法「Diffusion for Metric Depth (DMD)」を提案しています。この研究の主なアイデアは、室内と屋外のシーンの両方を共同でモデル化し、カメラの内部パラメータが未知の場合でも正確な距離を推定することです。
解決策と技術
Log-Scale Depth Parameterization: 深度をログスケールで表現することで、室内(比較的浅い深度)と屋外(深い深度)のシーンに対して均一な表現能力を確保します。
Field-of-View (FOV) Augmentation: トレーニングデータにおけるFOV(視野)の多様性を高めるために、画像をクロッピングまたは拡大することで、異なるカメラの内部パラメータに対してもモデルが良好に一般化するようにします。
Field-of-View Conditioning: 深度スケールの不確実性を解消するために、FOV(視野)を条件付け情報として使用します。これは、カメラの焦点距離などの内部パラメータが未知の場合に特に重要です。
Efficient Diffusion Parameterization: ニューラルネットワークのデノイジングにおいて、効率的な拡散パラメータ化を用いることで、推論速度を大幅に向上させます。
実験された内容のまとめ
以下は、この研究で行われた実験の主要な要素です。
トレーニングデータ: 研究では、ImageNet、Places365、ScanNet、SceneNet-RGBD、Waymo、DIML Indoorなどの多様なデータセットを使用しました。これらのデータセットは、予備トレーニングのために使用されました。
FOV(Field-Of-View)の拡張: トレーニングデータにおいて、異なるFOVをシミュレートするために、画像のクロッピングやアンクロッピングを行いました。これは、異なるカメラの内部特性に頑健なモデルを作成するために重要です。
FOVに基づく条件付け: メトリック深度推定において、カメラの内部特性が未知の場合、FOVを条件付け情報として使用しました。これにより、深度のスケールの曖昧さを解消しました。
デノイジング拡散モデル: DMDでは、効率的なU-Netアーキテクチャに基づいて、デノイジング拡散モデルを採用しました。これにより、メトリック深度推定における状態の最先端性能が達成されました。
サンプリング方法: 屋内データセットには8ステップのデノイジングが使用され、屋外データセットでは2ステップで十分でした。
実験結果

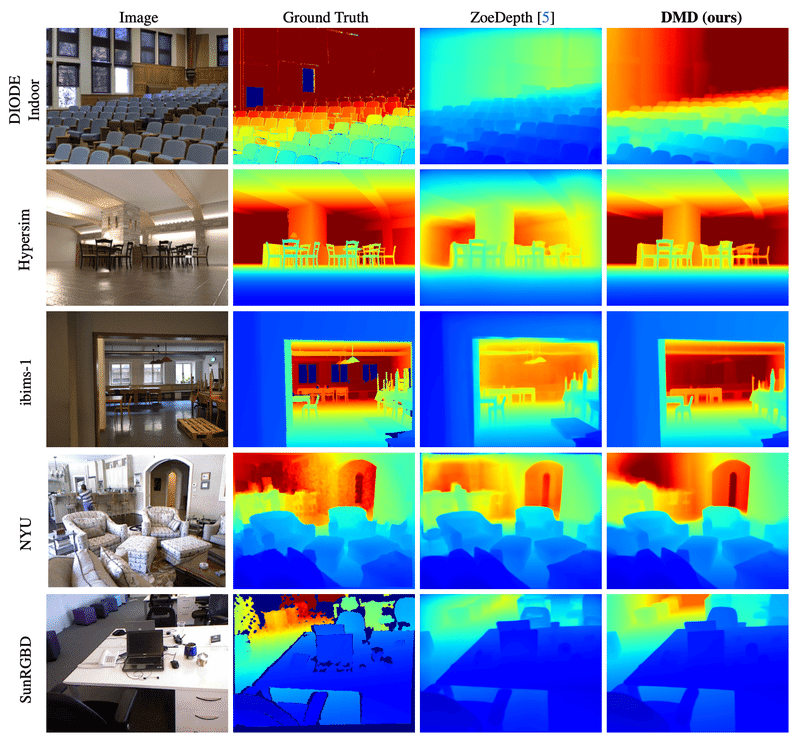
ゼロショット性能: DMDは、以前のモデルであるZoeDepthに比べて、未知のデータセット(屋内および屋外)における相対的な誤差を大幅に低減しました。特に、屋内データセットで25%、屋外データセットで33%の誤差削減が報告されています。
FOV条件付けの影響: FOV条件付けは、メトリック深度推定の精度を大幅に向上させました。特に、大きなFOVを持つデータセットでは、FOV条件付けがない場合に比べて、顕著な性能向上が見られました。
拡散モデルの効率: vパラメータ化を使用したDMDモデルは、従来のϵパラメータ化に比べて、少ないデノイジングステップで良好な性能を発揮しました。これにより、推論の遅延が大幅に短縮されました。
定量的評価: 屋内および屋外の両方のシナリオにおいて、DMDは他の最先端モデルよりも優れた性能を示しました。これは、DMDが広範囲のデータセットにまたがる一般化能力を持つことを示しています。
今後の展望
技術の進化: 研究は、モノクローム深度推定技術の進化を示しています。将来的には、より高精度でリアルタイムの深度推定が可能になることが期待されます。
応用分野の拡大: 自動運転、ロボット工学、仮想現実など、多岐にわたる分野での応用が予想されます。特に、現実世界の3Dマッピングやナビゲーションシステムへの応用が有望です。
アルゴリズムの最適化: 現在のモデルはさらなる最適化が可能であり、将来的にはより効率的なアルゴリズムが開発されることが予想されます。
注意点
計算コスト: 高度な深度推定モデルは計算コストが高い傾向があります。リアルタイム応用にはハードウェアの進化やアルゴリズムの効率化が重要です。
データセットの多様性: 訓練データセットの多様性がモデルの汎用性に影響を与えます。異なる環境や条件下でのデータを含めることが重要です。
エラーの可能性: どの技術にも限界があり、特定の条件下ではエラーが発生する可能性があります。これを理解し、応用時には適切な対策を講じる必要があります。
まとめ
この論文では、モノクローム深度推定のための新しいアプローチとして、拡散モデルを用いた「Diffusion for Metric Depth (DMD)」を紹介しました。このモデルは、屋内外のシーンの両方に適用可能で、特にゼロショット環境での性能が優れていることが示されています。また、深度推定のための新たな訓練戦略や、FOVの拡張と条件付けに関するイノベーションが紹介されました。将来的には、この技術はさらに進化し、様々な応用分野での使用が期待されます。しかし、計算コストやデータセットの多様性、エラーの可能性などの課題も考慮する必要があります。
この記事が気に入ったらサポートをしてみませんか?