
かわロボの暴走について

どうも、トンチャンです
今回はかわロボでよくある暴走について書いてみたいと思います
(※いつものことですがこれから書くことは経験則ですので鵜呑みにしないでくださいね…)
練習会ではよく見ますよね
プロポの操作の有無に関わらずロボが勝手に動いて、
急いで電源を切るやーつですね
自分が考える要因として以下があると思っています
・受信機アンテナの配置
・信号線がゆるい(抜けやすい)
・バッテリーの劣化&消耗した状態での使用(一番重要)
・受信機アンテナの配置
これは頻度的にはあまり無いような気がします
かわロボ界隈で使うフタバ製の受信機であればたとえノイズの乗りやすいと言われるモーターの近くに配置しても正常に動くことが多いので、この辺りはあまり影響は少ないのかと
まあ、ノイズが乗りやすいと言われている近くに配置するよりは離した方がいいと思います
・信号線がゆるい(抜けやすい)
これは想像でも分かりやすいかと思います
制御を司る血管のような存在なので、ここが接触不良を起こしていれば暴走の原因になりえます
信号がしっかり読めないわけですからね
・バッテリーの劣化&消耗した状態での使用
自分が今回一番言いたいのがこれです
この項目を語る上で知っておく必要がある事がいくつかあります
・バッテリー劣化による違い
・BECの特徴
・バッテリー劣化による違い
実験してみます

これらを比較してみます
上が過放電を何度も起こしている傷んでいる(劣化している)練習用バッテリー(YUNTONG3400リフェ)
下があまり傷んでいない(劣化少)本番用バッテリー(イーグル3200リフェ)

このような放電器を使って計測してみます
この機械は放電電流のMAXが35Aまで行けます
充電仕立てのバッテリーが大体7v前後なのでそこからバッテリー電圧が5.0vになるまで徐々に電流量をMAX35Aまで機械が勝手に上げていってくれます
シールド回転の場合、停止状態から回し始めて(減速比にもよりますが)瞬間で200A越えますので全然容量足りませんが、まあ比較の参考までだと思ってください

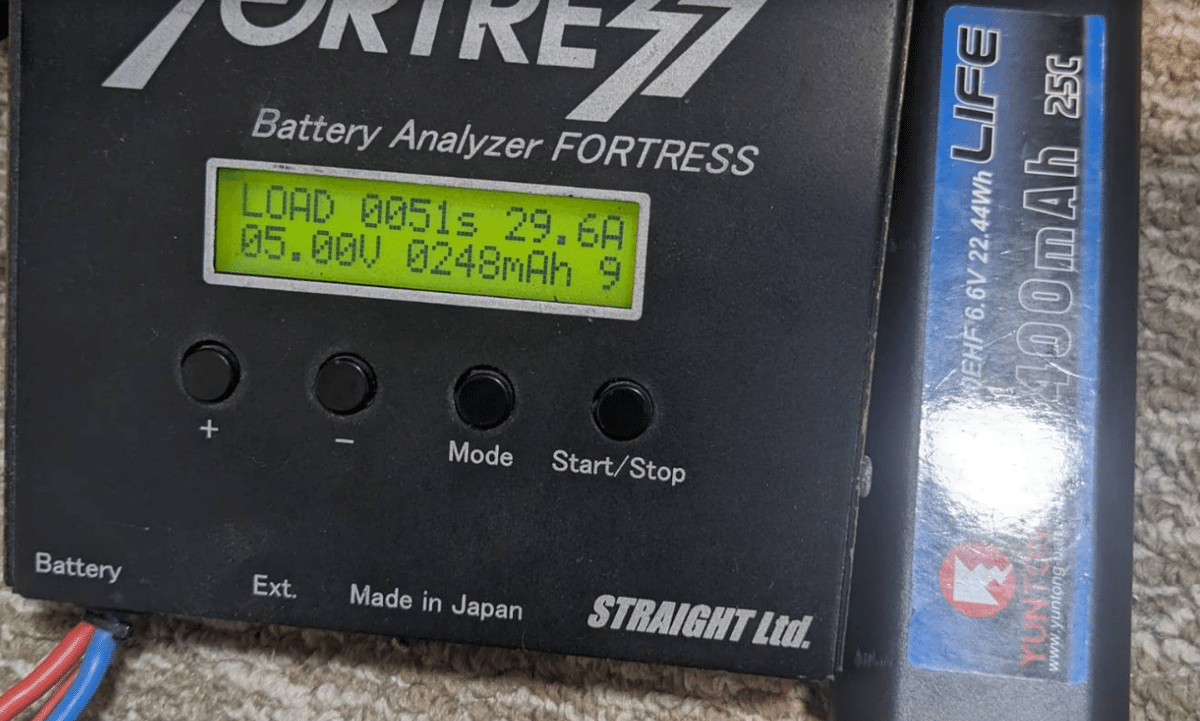
負荷をかけたときの電流値(5.0v29.6A)(YUNTONG3400リフェ)
YUNTONG3400 pic.twitter.com/iPHrnb810x
— トンちゃん@製作依頼受付中 (@shintyanpon) November 20, 2023
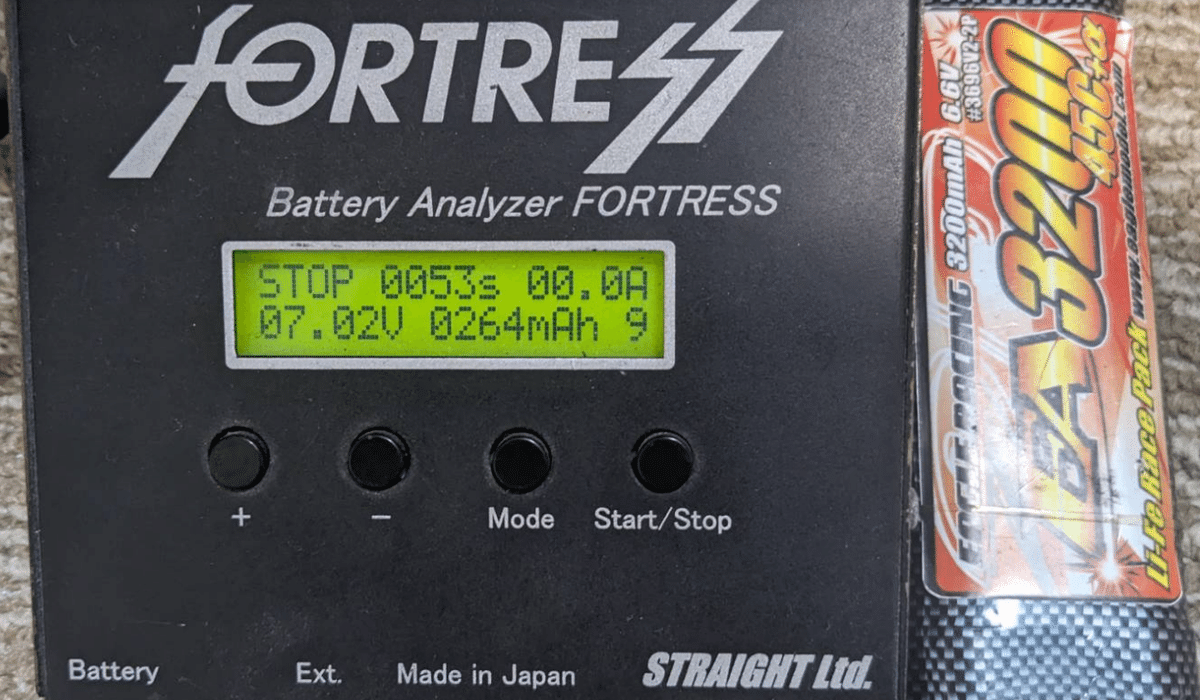

イーグル3200 pic.twitter.com/lEwF6jAea4
— トンちゃん@製作依頼受付中 (@shintyanpon) November 20, 2023
本当は同じ種類のバッテリで比較したかったのですが今回は許してください…
YUNTONG3400リフェは35.0Aまで放電電流を上げきる前に5.0vを切ってしまいました
一方イーグル3200リフェは35.0Aでは足りず5.69vを示しています
バッテリーの種類は違えど容量はYUNTONG3400リフェのほうが大きいのでそこまで差は出ないはずなのですが5.0v29.6Aと5.69v35.0A(5.0v換算で電流量は相当大きい)はだいぶ差がありますよね
このように傷んでいるバッテリーとそうでないバッテリーでここまで差が出てきます
負荷を大きく掛けても維持できる電圧が異なるんです
この結果を踏まえて今度はBECのお話へ
・BECの特徴
まず、BECとは?
昔の電動ラジコンが流行り始めた頃はまだBECというものはなく、
受信機+受信機&サーボ用バッテリ、可変抵抗器(厳密には違う)+サーボ、駆動モーター+駆動用バッテリ
という感じで、まだアンプすらなかったんですねぇ
そして後にアンプ(ESC)が誕生して
受信機+受信機&サーボ用バッテリ、アンプ+サーボ+駆動モーター+駆動用バッテリ
という構成になっていきました
つまり、今までは【動力】用と【サーボ&受信機】用の2種類のバッテリーを用意する必要があったわけです
バッテリーを2個用意するのは手間ですし、なんなら受信機用バッテリーの分、重量も加算されてしまうんです
それを解決すべく出来たものがBECなのです
受信機&サーボ用バッテリーの代わりに動力用バッテリーから電源を分けてもらおうという考え方です
かわロボで言えばlife4セル(13.2v)を5〜7v程度に減圧させて受信機に供給します
こうすることで
受信機+アンプ+BEC+サーボ+駆動モーター+駆動用バッテリ
というように、受信機とサーボの電源をBECに担当させることで単純化、軽量化出来るようになりました
ここまで見てみるとBECを使うと良い事ばかりですが、もちろんデメリットもあります
特徴として
・電源電圧がBECの出力電圧以下になると電源供給がストップしてしまう
というものがあります
この特徴を踏まえていえることは…
・私の考える大半の原因
劣化したバッテリーを使うとこういうサイクルが起きます
①モーターを回す
②バッテリーに負荷がかかる
③バッテリー電圧が下がる(モーター個数の影響大)
④瞬間的にバッテリー電圧がBEC出力電圧を下回る
⑤BEC電圧の供給ストップ
⑥瞬間的に受信機電源が落ちる
⑦受信機が落ちることでアンプ出力も一旦停止
⑧負荷がなくなることでバッテリー電圧が回復する
⑨受信機ONになるがニュートラルがズレた状態でアンプ起動
⑩モーター暴走
私は暴走の原因はほぼこれだと思っています
要は受信機への電源供給が行われなくなり一時的に受信機がオフになるということです
その結果暴走を起こすことになります
・対策
対策として以下があげられると思います
・受信機用電源を別に用意する
・受信機の余っているポートに大きめのコンデンサを取り付ける
・バッテリーの状態を把握しておく
・受信機用電源を別に用意する

例えばこの受信機であれば4.8~7.4Vの電圧がかけられるみたいなのでその電圧帯のバッテリーをつなぐのが間違いないですね
電源切るごとに抜かなきゃいけませんがw
・受信機の余っているポートに大きめのコンデンサを取り付ける


受信機の電源(赤線)とGND(黒線)は写真に写っている受信機の場合1~6chまで導通していますので、余っているポートにコンデンサを差すだけで超軽量な停電時非常用電源になります
(昔もっと小さいのあったんだけどなあ)
・バッテリーの状態を把握しておく
上記の④が起こらなければいいわけですね
よく学校の団体で参加されている方々で、バッテリーを個人管理でなく団体で管理しているパターンがよくあるかと思います(団体管理が悪いと言っているわけではありません)
この場合、数回過放電したバッテリーがどれか、などの情報が使用者に伝わらないので、荒く操縦したりして電圧がすぐに下がってしまいます
なかなか管理難しいですが…
以上こんな感じで書いてみました
トラブルシューティングの参考程度になれば幸いでございます
ではまた
(X(旧ツイッター)で読んだよコメントもらえると励みになります…)
この記事が気に入ったらサポートをしてみませんか?