
システムのモデル化と制御系設計

本記事では、電気機器に電力を供給する回路の制御系を設計して、Python-Control で特性をシミュレーションしてみます。最後に、回路シミュレータのPSIMを使って Python-Control のシミュレーション結果と比較します。
制御について、もう少し具体的に書くと、DC/DC降圧コンバータを電流フィードバック制御、電圧フィードバック制御して、コンバータの出力電圧を制御します。
ちなみに、今回の制御対象は電気回路ですが、制御対象の伝達関数を違うものに置き換えれば、様々なシステムの制御に応用展開できます。例えば、制御対象がモータになれば、慣性モーメントの伝達関数で置き換えて、モータの速度制御に応用できます。
内容は、大学の授業レベルで書いていきます。授業のレポート作成だけでなく、新しく勉強を始められた方、復習している方のお役に立てればうれしいです。
また、かなりボリュームのある内容なので、少しずつ読み進めていくのが良いと思います。後半は有料記事となっておりますので、途中まで読んで興味をもって頂けたら、最後まで読んで頂けると嬉しいです。
目標
DC/DC降圧コンバータの出力電圧を制御する。
システム構成
本記事で扱うシステムの構成は下図となります。以降では、このシステムを伝達関数にモデル化し、フィードバック制御の閉ループ伝達関数を導出、コントローラの制御設計をしていきます。そして最後に、Python-Control のシミュレーションと、回路シミュレータのPSIMを用いたシミュレーションでステップ応答の特性を確認していきます。
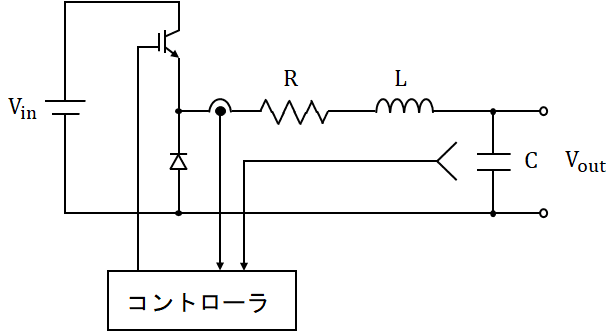
上図のシステムは、「制御対象(プラント)」と「制御部(コントローラ)」に分類されます。
【システム構成の分類】
①制御対象(プラント)
⇒ 電気回路
②制御部(コントローラ)
⇒ マイコン等
制御対象は以下のパーツで構成されています。補足ですが、リアクトルとは、電気回路におけるインダクタンス素子です。コイルと考えてもらえればいいと思います。コイルには巻き線の抵抗分がありますので、巻き線抵抗を R として回路に含めています。
【制御対象の構成】
・入力の直流電源 Vin
・降圧チョッパ回路の半導体素子
(IGBTやMOSFET、ダイオードなど)
・リアクトルのインダクタンス L
・リアクトルの巻き線抵抗 R
・出力平滑コンデンサ C
制御部は次のように構成されています。リアクトル電流と出力電圧の2箇所をセンサで検出して、フィードバック制御を行います。
【制御部の構成】
・電流フィードバック制御系
・電圧フィードバック制御系
そして、制御部のアウトプット(操作量)にしたがって、制御対象の状態をコントロールする役割を担うのが降圧チョッパ回路になります。具体的には半導体スイッチ(IGBTやMOSFET等)の ON/OFF 動作です。コントローラから与える操作量にしたがって半導体スイッチをON/OFFすることで、リアクトル電流と出力電圧を制御します。降圧チョッパの動作や伝達関数は後ほど解説します。
【制御部 ⇒ 制御対象の実現】
・半導体スイッチのON/OFF
(IGBTやMOSFET等)
ここまでの内容で、システム全体の構成は把握できたと思います。次は、システムを伝達関数にモデル化していきます。
モデル化(リアクトル)
リアクトルをモデル化します。電気回路なので、電圧方程式を立ててモデル化します。
システム構成図から、リアクトルのインダクタンス L と巻き線抵抗 R を抽出したのが下図になります。回路は4端子回路で In/Out を考えます。ここでは、チョッパ回路の出力電圧(ダイオード両端電圧)を Va とし、リアクトルに流れる電流を Ia とします。
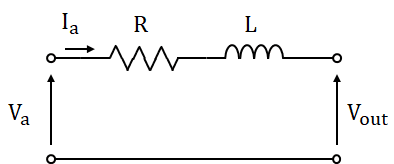
上図の回路から電圧方程式を立てます。

リアクトル電流をフィードバック制御したいので、入力が電圧、出力が電流となる伝達関数に式変形します。
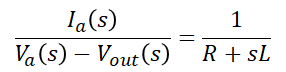
上式をブロック図で表すと次のようになります。
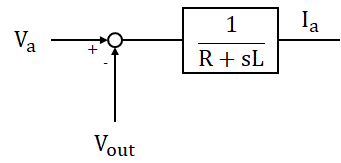
これでリアクトルのモデル化が完了です。
モデル化(出力コンデンサ)
出力コンデンサをモデル化します。リアクトルと同様に、電気回路なので、電圧方程式を立ててモデル化します。
システム構成図から、出力コンデンサ C を抽出したのが下図になります。リアクトルと同様に、4端子回路で In/Out を考えます。ここでは、コンデンサに流れる電流を Ic とし、降圧チョッパの外に出力される電流を Iout とします。
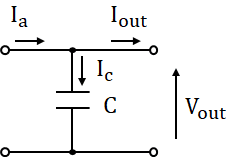
上図の回路から電圧方程式を立てます。


出力電圧をフィードバック制御したいので、出力が Vout となる伝達関数に式変形します。
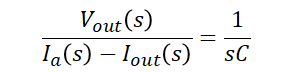
上式をブロック図で表すと次のようになります。
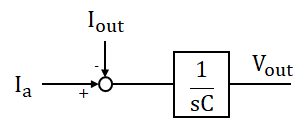
これで出力コンデンサのモデル化が完了です。
モデル化(PI調節器)
制御部(コントローラ)をモデル化します。制御には「古典制御」と「現代制御」があります。本記事では伝達関数モデルをベースとした古典制御で設計しています。
古典制御では、システムを制御するためにPID制御というものが使われていますが、微分器(Derivative)を入れるとシステムが高次化して設計が難しくなるので、今回はPI制御を用います。PI制御は比例器(Proportional)と積分器(Integral)の組み合わせです。もし、PI制御で所望の特性が得られなかったらPID制御にするのが良いと私は考えています。
制御設計のポイントとして、いきなり複雑な制御系を設計をするのではなく、簡単なモデルで設計を始めていき、必要に応じて追加していくのがポイントだと思います。複雑な設計は、あとで手を加えるときに、設計変更がかなり大変です。
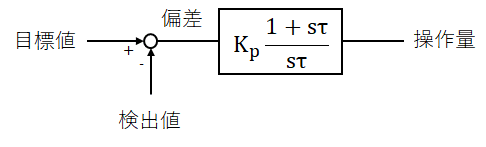
話が逸れてしまったので本題に戻します。PI調節器の伝達関数は、比例器(Proportional)+ 積分器(Integral)なので次式となります。Kp は比例器のゲイン、Ki は積分器のゲインです。この Kp と Ki を調整することでシステムの制御特性を変えることができます。


上式より、PI調節器をブロック図で表すと次のようになります。PI調節器に目標値と検出値の偏差をPI補償器へ入力し、比例+積分の出力である操作量を出力することでシステムを制御します。
これでPI調節器のモデル化が完了です。
降圧チョッパの解説
降圧チョッパをモデル化します。ですが、本題へ入る前に降圧チョッパの動作について簡単に解説します。
ここから先は
¥ 200
何かお役に立てたら、サポートしていただけると嬉しいです!モチベーションを高めて、アウトプットしていきます!