
Mini Pupperの組立ポイントをまとめてみる

Mini PupperはKickstarterで5,700万円(HK$3,900,000)を集めた、中国のMangDangテクノロジー社の四足歩行ロボットです。
現在(2022年2月)日本では、Makuakeでキャンペーン中です。

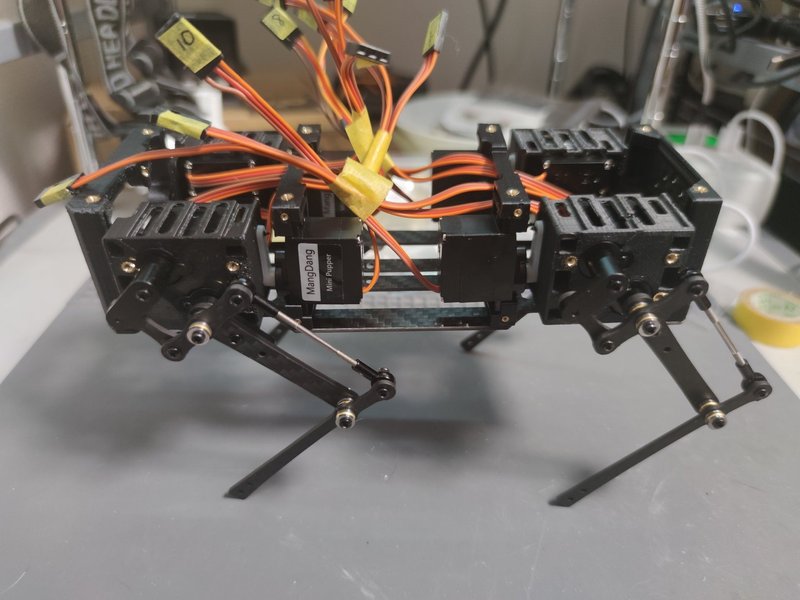
実際に完成したものを動かした動画です。思った以上にキビキビと動いて楽しいです。
よし!リモコンで動いた!これは楽しい!#100日後に動き出すMiniPupper
— tomorrow56 a.k.a. ThousanDIY(モ2済3未) (@tomorrow56) February 12, 2022
93日前倒ししたww pic.twitter.com/Vu0LGMS0nQ
今回は評価機を提供していただけましたので、組立で苦労したポイントをまとめてみます。
組立の実況中継をツイッター
組立にあたっては、まとまった時間を取れなかったので、毎朝1−2時間と時間と作って組立状況をツイッターで実況しました。
#minipupper 日本代理店からの評価機が届きました。これから開封~ pic.twitter.com/PmInI6XY60
— tomorrow56 a.k.a. ThousanDIY(モ2済3未) (@tomorrow56) February 6, 2022
組み立てにあたっては、公開されている手順書でわかりにくい部分や現物と異なる部分がありましたので、実際の組み立て手順に従ってまとめていきます。
組立て前の準備
組立手順書の入手
本体には組立手順書は同梱されていません。
手順書は以下で公開されていますので、これを見ながら順番に組み立てていきます。手順書は英語と日本語が併記されています。
また、各種ドキュメントや設計データはオープンソースとしてMangDang社のGitHubで公開されています。
開封の儀
外箱を開けると、各部品は個包装されていて、スポンジのクッションで固定されています。予想よりきちんとしています。

本体パーツは白い箱に収められています。箱の中は余裕があります。
中国製のキットはギチギチに詰め込まれているものを見かけることが多く、これはきちんとしているという印象です。

赤い箱にはRaspberry Pi 4(以降、ラズパイ)とコントローラボード(カスタム回路基板)が入っています。現在、調達が非常に困難なので、苦労が想像されます。

付属のリモコンはPS4互換です。Binbok製のこちらの色違いのようです。

ちなみにリモコンのボタンの表示がPS4純正品と異なっています。組立手順書ではPS4のボタン名で記載されていますので、以下を参考にボタン配置を確認しておきます。
バッテリーパックとリモコンの充電
組立を開始する前に、バッテリーパックとリモコンを充電しておきます。
特に、付属リモコンは充電中はペアリングモードには入らないので、必ず組立前に充電することをおすすめします。

脚の組立て
脚パーツの組立て
まず最初に脚を組み立てていきます。手順書の写真をもとに必要な部品を確認します。
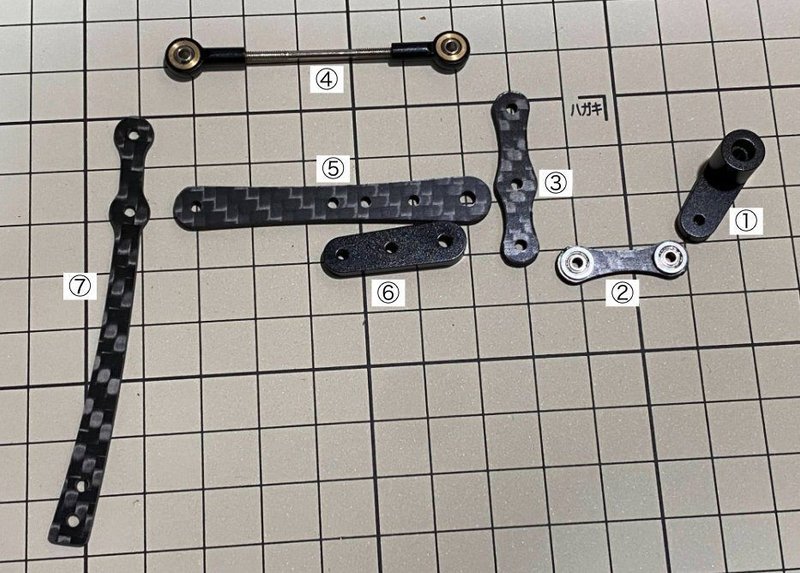
脚のパーツのほとんどはまとまった袋に入っています。ただし、①と⑥の部品はサーボの袋に入っているので注意してください。
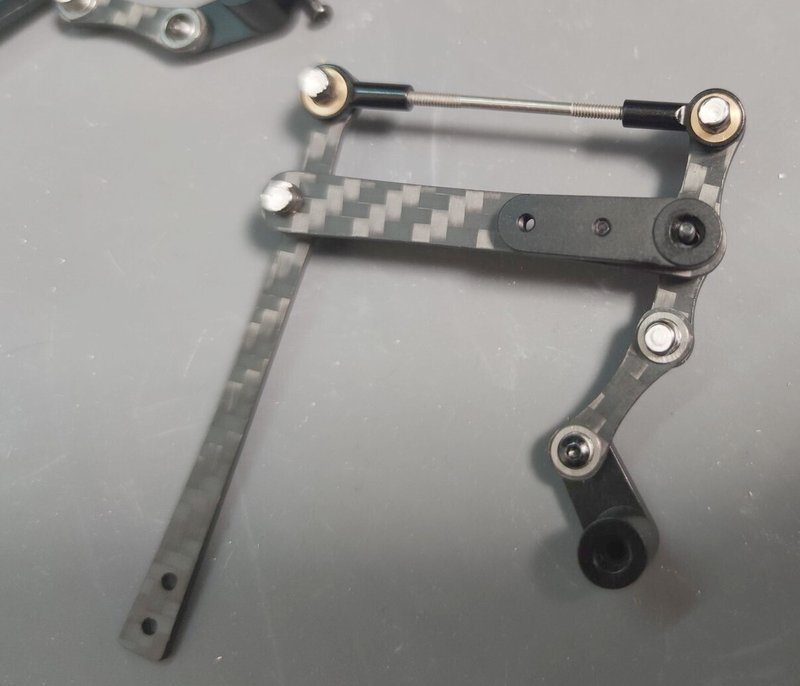
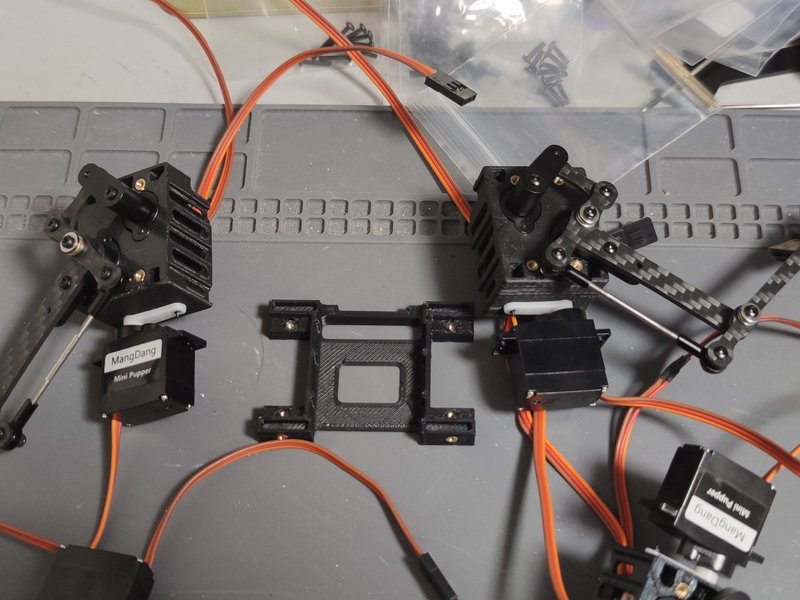
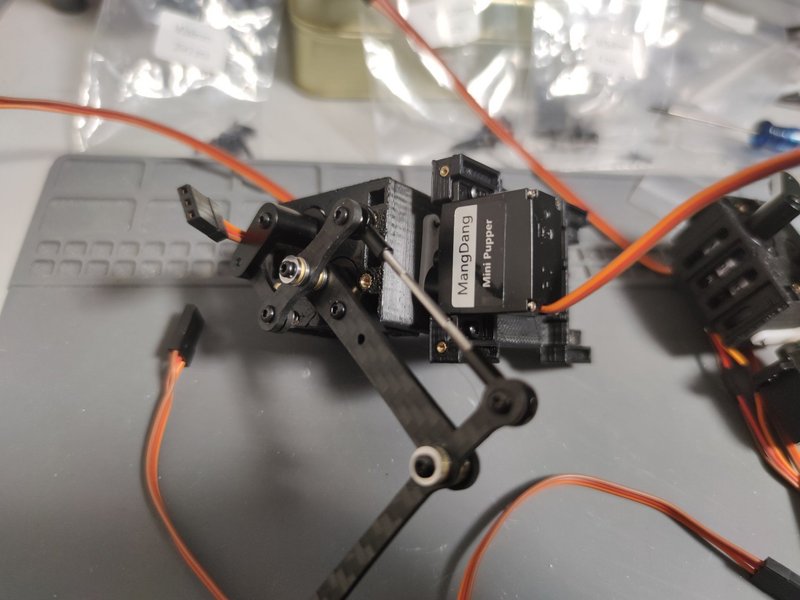
④の部品は、3個のパーツを組み合わせているので、以下の写真のように、球状軸受の位置が⑤の穴位置と合うように長さを調整します。

まず、①と②をM2x5mm のボルトで固定します。ボルトを締めるには付属のM2用の六角レンチを使用します。ただ、付属のレンチはボルトの穴に対してかなり緩めですので、別途、きちんとした六角レンチを準備しておくことをおすすめします。

これに③の部品をM2x8mm のボルトと M2のロックナットを使用して取り付けます。ロックナットは付属のスパナを使って締めます。


次に脚のパーツ⑤にサーボホーン⑥をM2x5mmのボルトで固定します。⑥の取付方向とボルトの向きを間違えないように注意します。
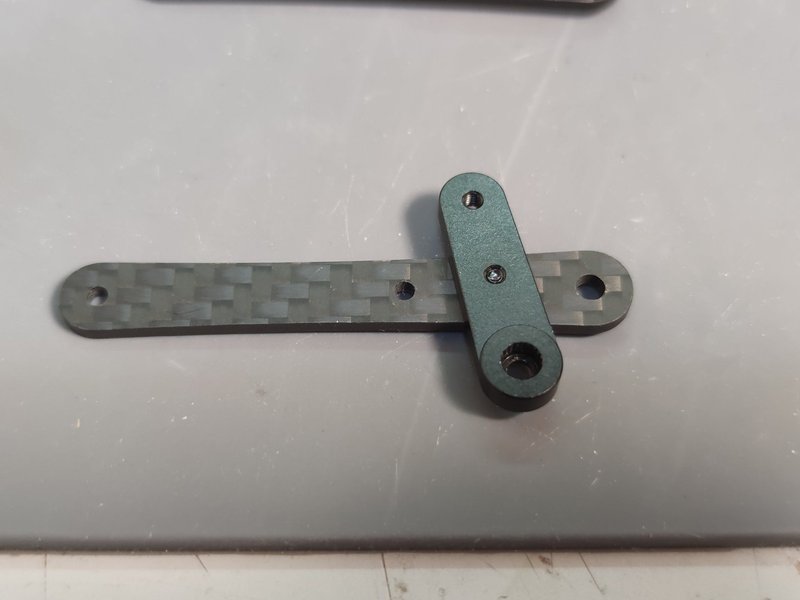
このパーツに⑦をM2x12mmのボルトとM2ロックナット、ボールベアリングを二組を使用して取り付けます。
一組のボールベアリングは3つの部品に分かれているので、上下の部品の溝がある方を内側に向けて、真ん中のボールのついた部品をはさみます。

ボルト、ボールベアリング、ロックナット及び各部品は以下の写真を参考に順番にボルトに通してロックナットで固定します。
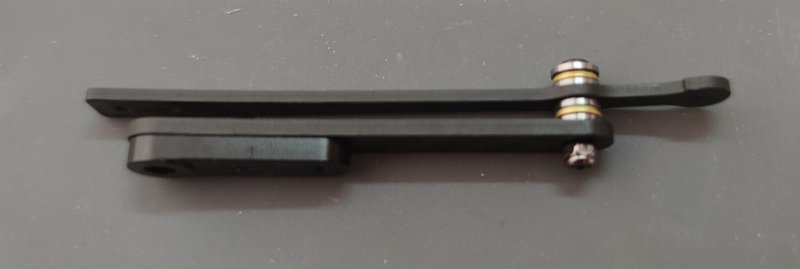
これに④の球状軸受部分をM2x8mmのボルトとM2ロックナットを使用して固定します。
取り付けの向きは以下の写真を参考にしてください。

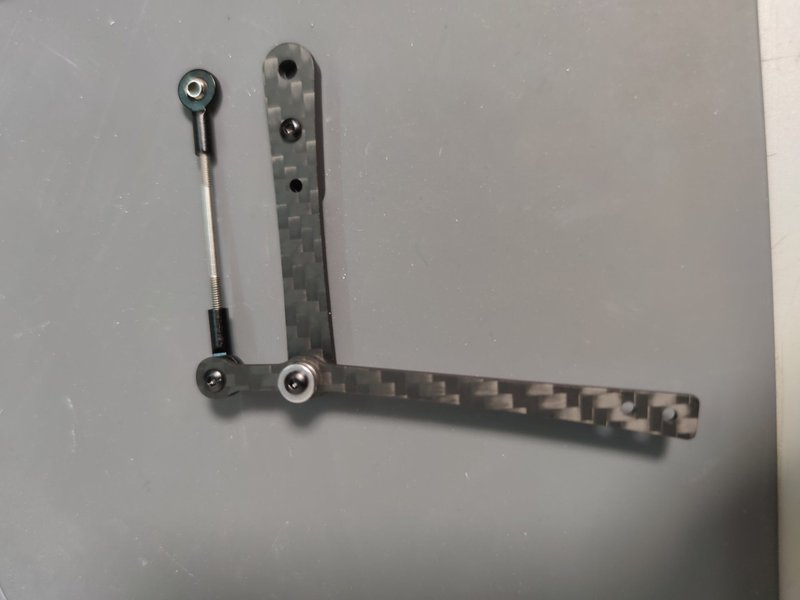
このパーツに最初に組んだ①〜③の部品をM2x8mmのボルトとM2ロックナットで取り付けてリンク構造にします。

これを左右4個組立てます。左右で部品の裏表の組み合わせが違うので、以下の写真を参考にそれぞれ組みます。
組立てたら、ロックナットの部分を緩まないようにロックタイトで固定します。今回はロックタイトがないので修正液で代用します。

⑥のサーボホーンと③の真ん中の穴にM2x14mmのボルトとボールベアリング2組を使用して取り付けます。
サーボホーンは後ほどサーボに固定しますので、ナットで固定はせずにそのままとします。

臀部のパーツの組立て
次に臀部のパーツにサーボを取り付けます。サーボはリード長が9cmと15cmのものがあります。
臀部は前後左右で全て部品の向きが異なりますので、注意しながら組み立てます。
まずは9cmのサーボにサーボホーンを挿し込んで、3Dプリントされた臀部パーツの外側に固定します。サーボはデフォルトでセンター付近になっていますので、サーボホーンの差し込み時に回転しないように注意してください。
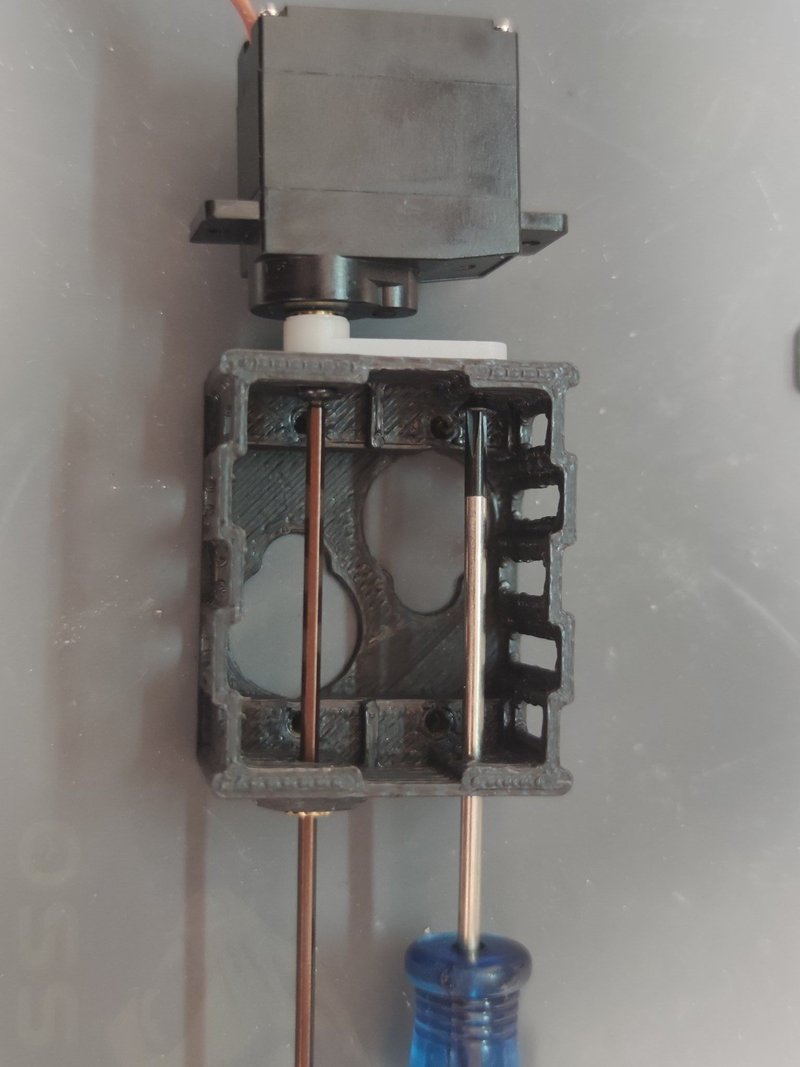
サーボホーンの先はM2x6mmのタッピングビスを、サーボの軸との固定はM2x6mmのボルトを使用します。下の写真のように長い十字ドライバーと2mmの六角レンチを臀部パーツの穴から挿し込んで締め付けます。
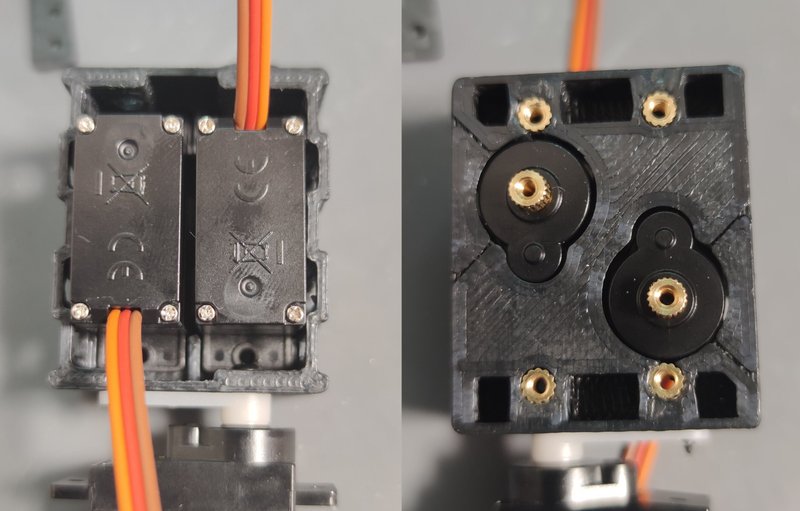
これに15cmのサーボ2個をはめて、サーボの裏側からM2x6mmのボルト4本で固定します。
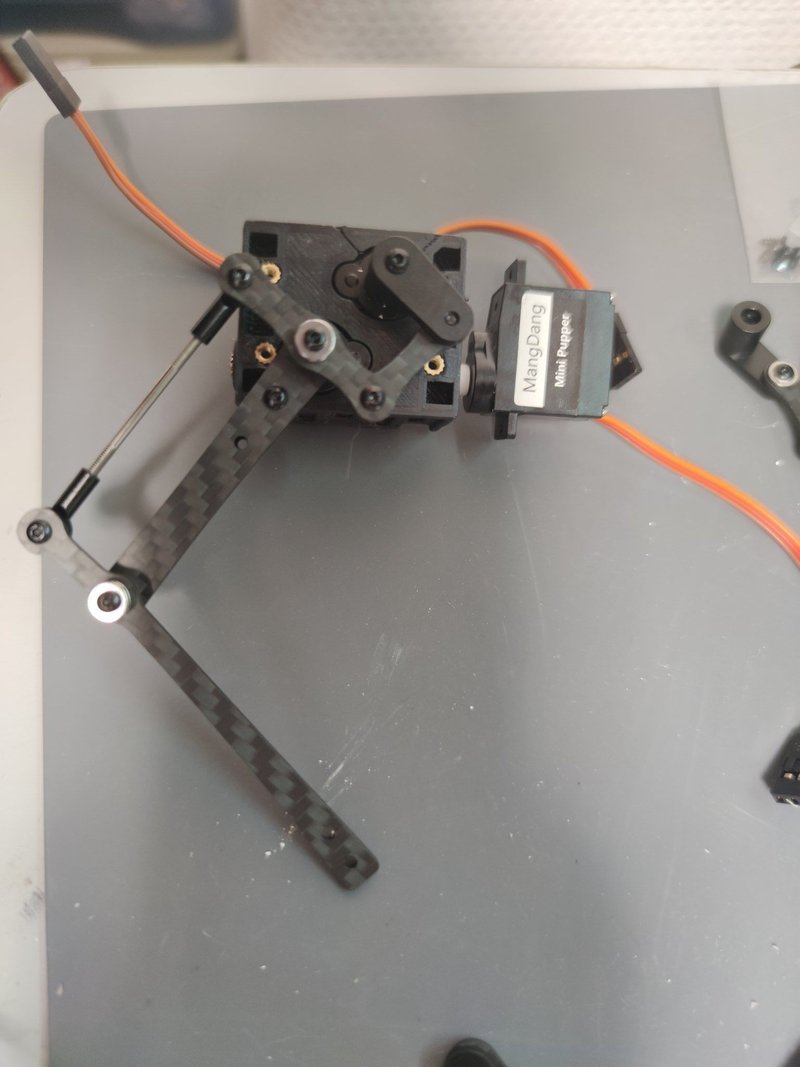
臀部パーツに脚を取り付け
この臀部パーツにM2x12mmのボルトを使って、脚を取り付けます。脚の組立時に締めていなかったボルトもここでサーボに締め付けます。この時、サーボのビスが緩まないように、サーボの軸の穴にロックタイトを塗っておきます。
脚と臀部は下の写真のように脚が大体45度傾くように取り付けます。
前後左右で脚と臀部の組み合わせが異なりますので、間違えないように注意してください。
これを下の写真を参考に組み合わせに注意して前後左右で4個分を組立てます。

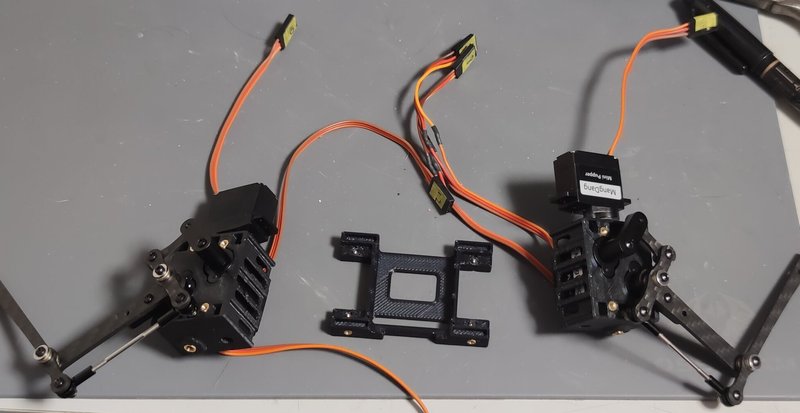
センターパーツへの脚の取付け
脚が組立て終わったら、センターパーツへ取付けていきます。
前方左右の脚の取り付け
まずは、前方パーツに脚を取付けます。取り付ける脚の種類を間違えないように注意してください。
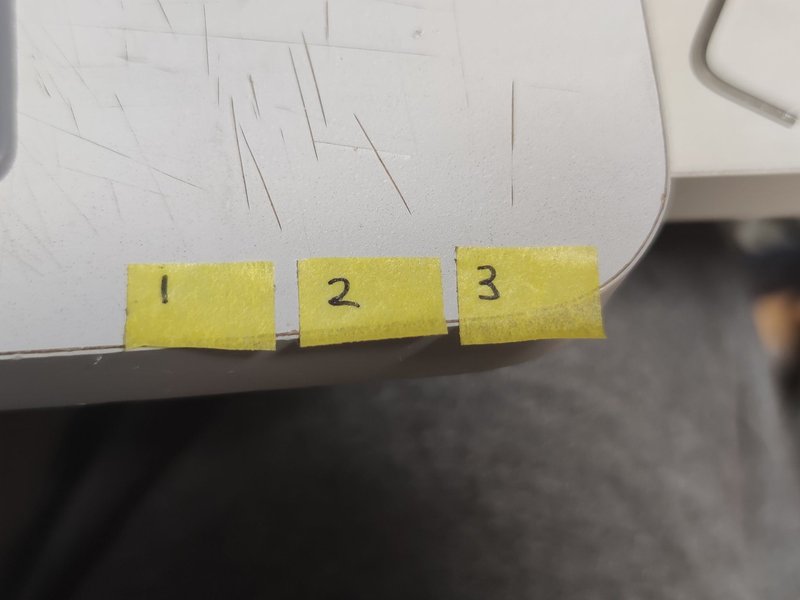
サーボのコネクタを区別するために、あらかじめ番号を書いたマスキングテープを準備しておきます。
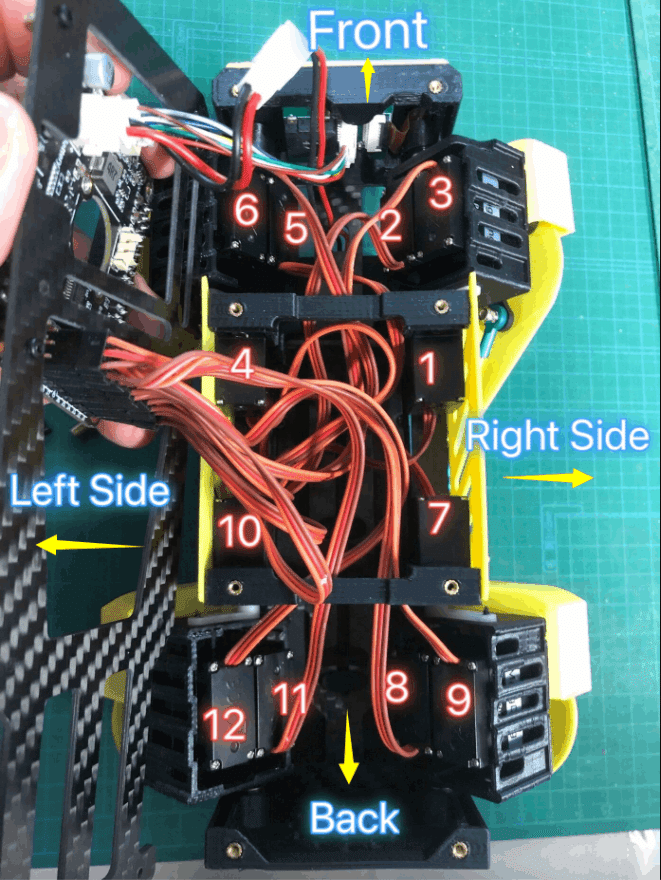
サーボの番号は組立て手順書にある写真(以下)を参考にします。
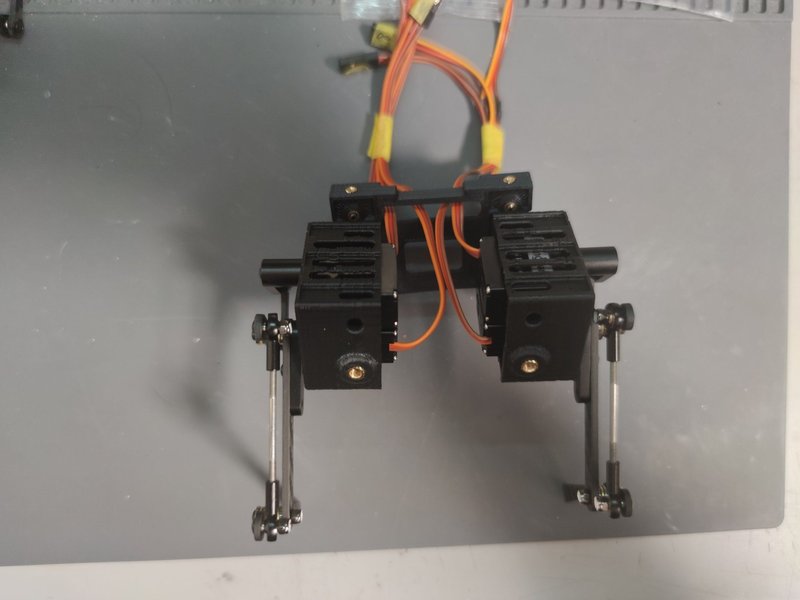
では、前方左脚から取り付けていきます。
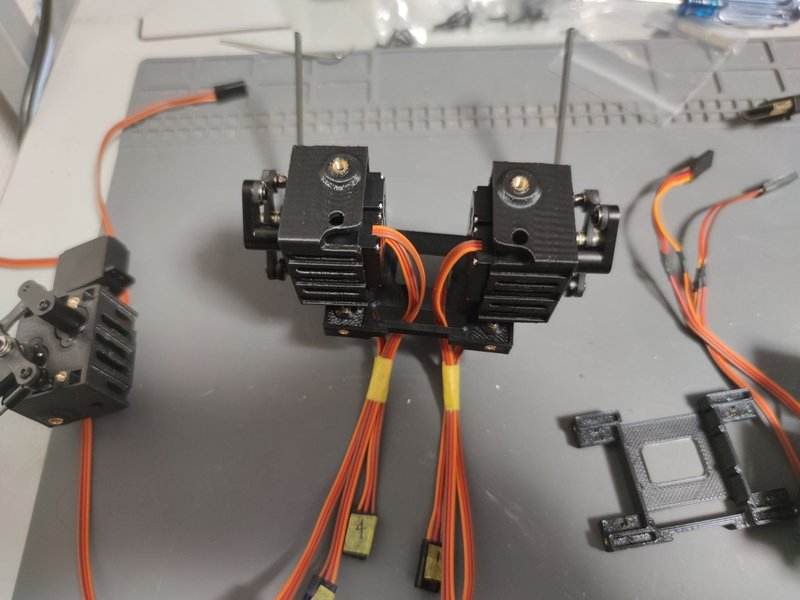
前方パーツの左の部分に下図のようにサーボをはめ込みます。前方パーツの裏表を間違えないように注意してください。
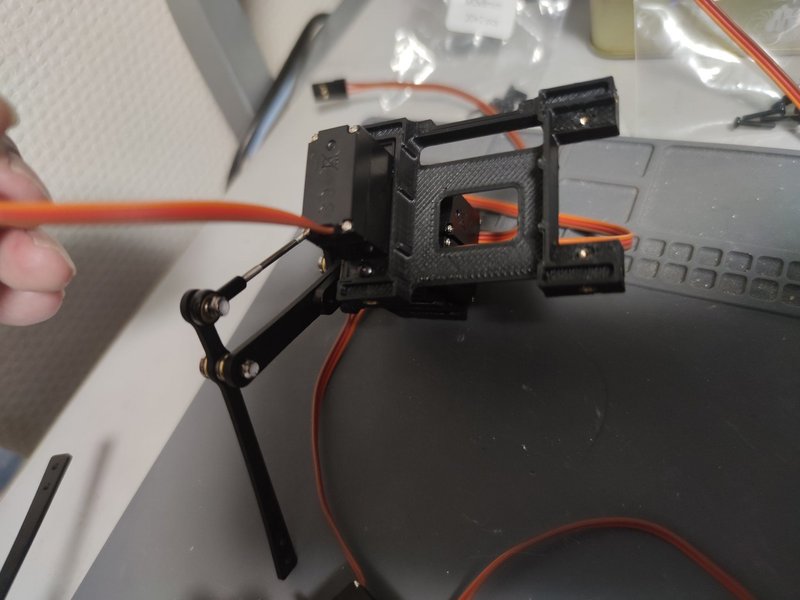
M2x8mmのボルト2本を使ってはめ込んだサーボを後方から固定します。
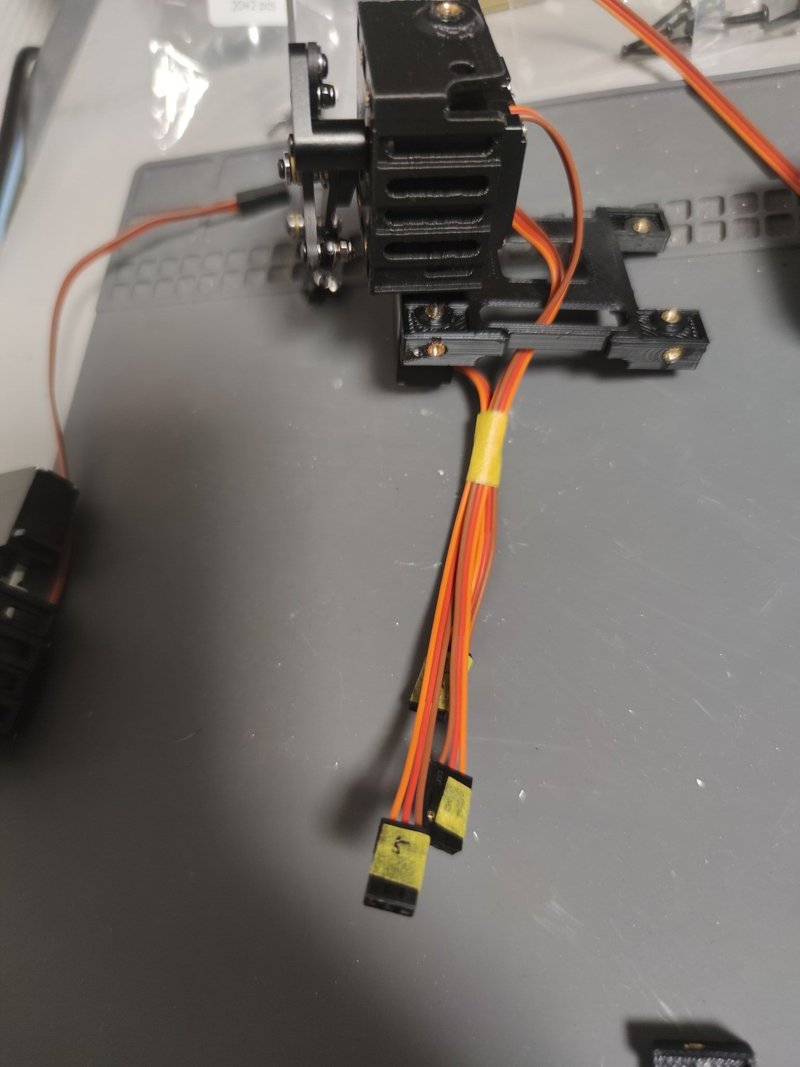
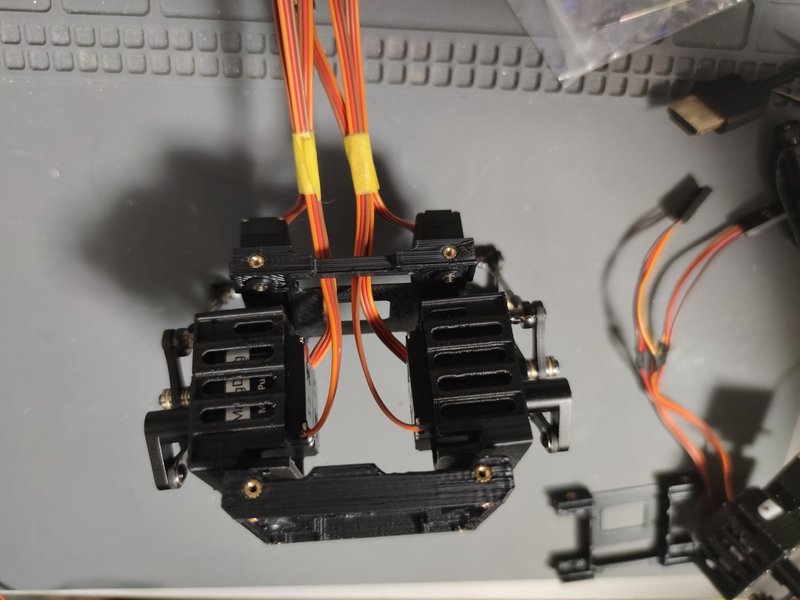
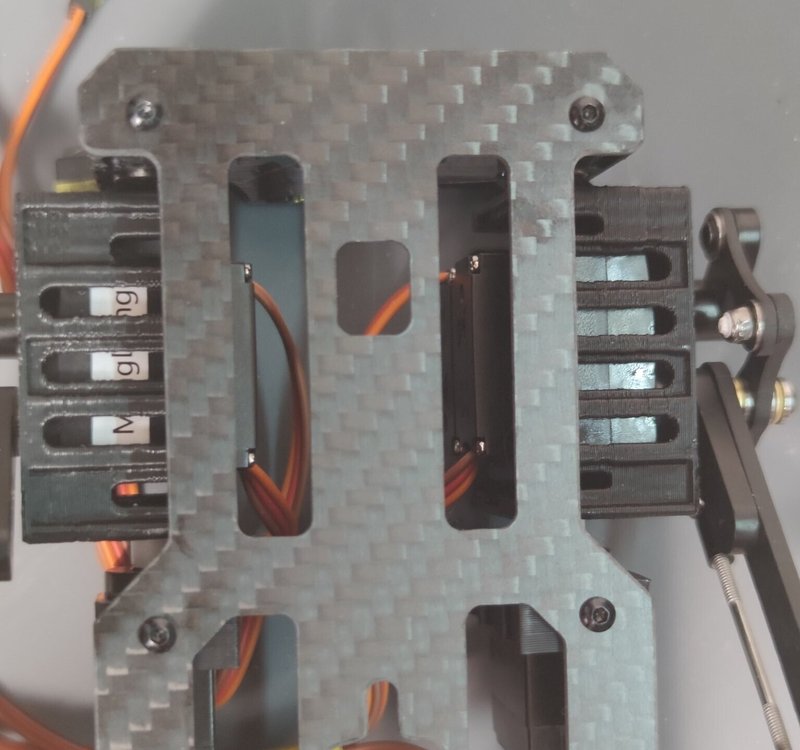
サーボを固定したら、成形品の長方形の穴に前方側のサーボの長いリードを通します。
各サーボのコネクタに番号を書いたマスキングを貼り付けて、3本のリードをマスキングテープで束ねます。上記で取り付けたのは前方左なので、サーボの番号は4〜6になります。
同様に前方右脚も前方パーツに取り付けて、サーボリードをマスキングテープで束ねます。
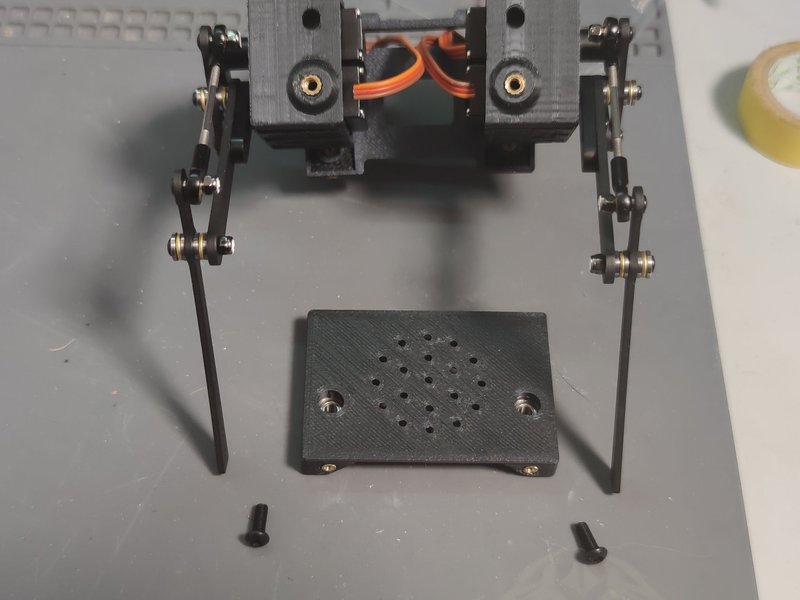
前面パーツの取付け
組立てた前脚パーツに液晶パネルがつく前面パーツを取り付けます。
組立て手順書には「M3x8mmの皿ネジで取付け」と書いてありますが、今回の機体に付属していたのは「M3x8mmのボルト」でしたので、こちらを使用します。
M3用の六角レンチは付属していないので、別途準備する必要があります。
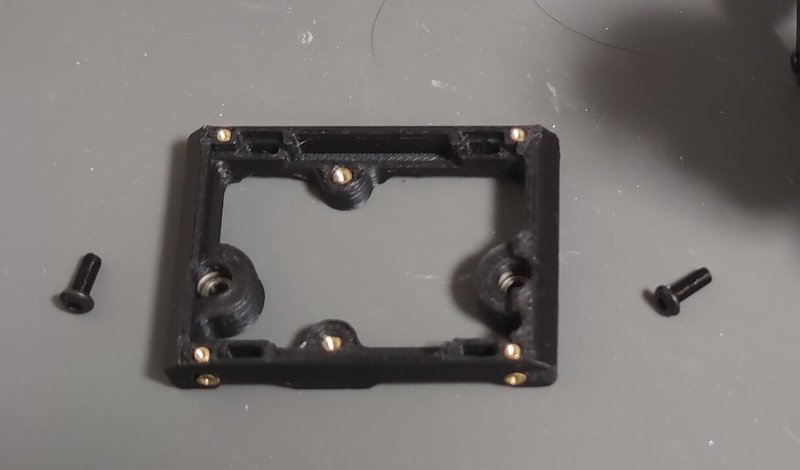
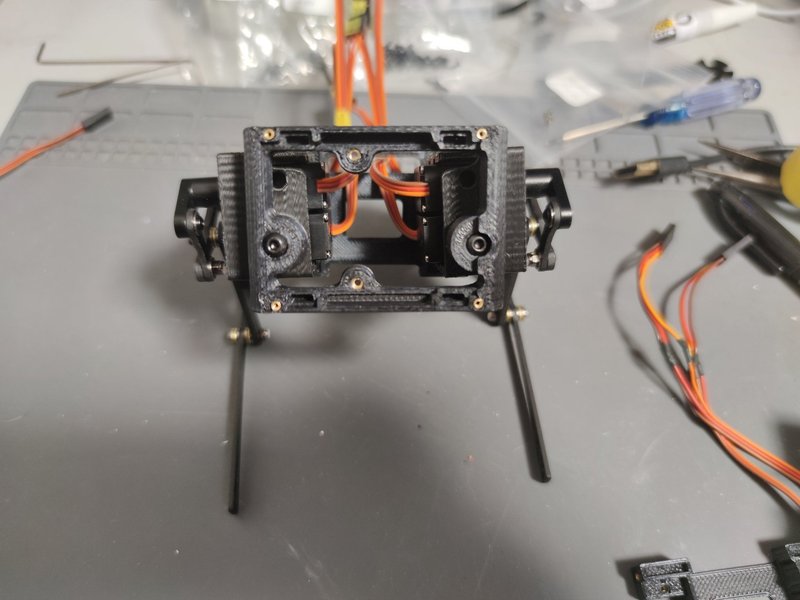
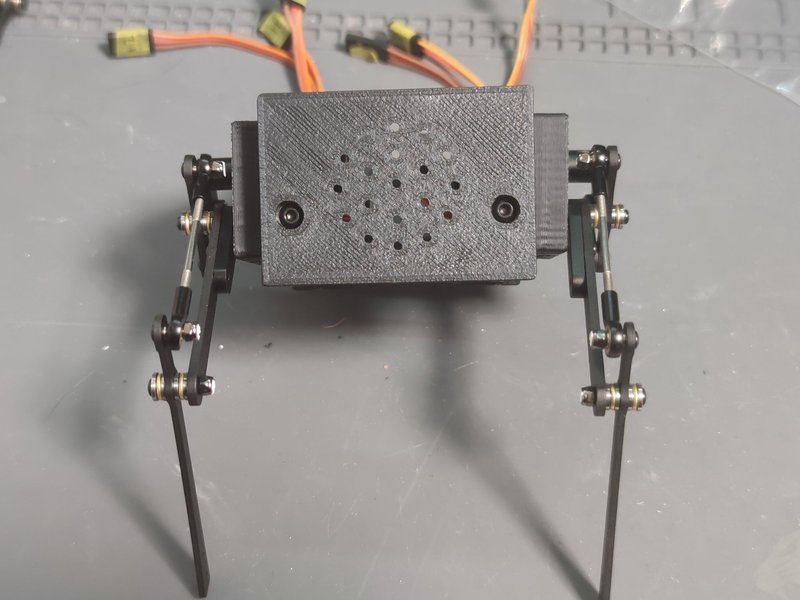
前脚パーツのフロント側に前面パーツを固定します。前面パーツの裏表と上下を間違えないように注意してください。
後方左右の脚の取付け
後方も同様に後方パーツに後方左右の脚を取付けます。この時、後方パーツの裏表と、取付ける脚を間違えないように注意します。
左右後脚を後方パーツに取り付けたら、前脚と同じくサーボリードを後方パーツの穴を通してマスキングテープで束ねます。
後面パーツの取付け
組立てた後脚パーツのリア側に「M3x8mmのボルト」を使用して後面パーツを固定します。前面パーツ同様に後面パーツの裏表と上下を間違えないように注意してください。
ボトムプレートへの脚パーツの取付け
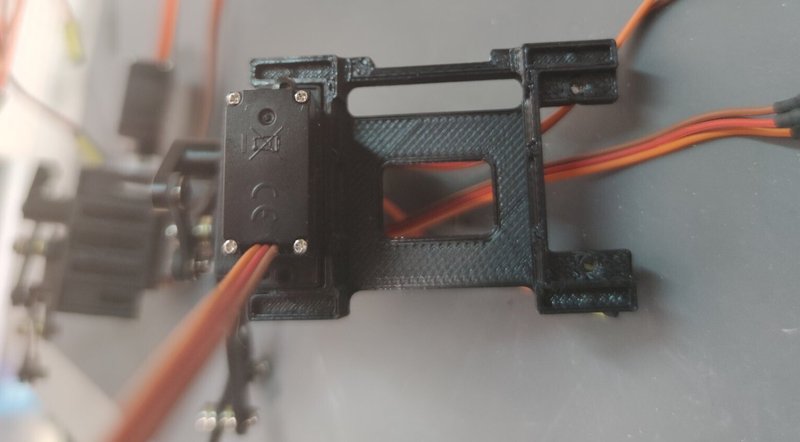
組立てた前後の脚をボトムプレートに取り付けます。ボトムプレートには最後にバッテリーパックをはめ込みますので、穴の周辺が斜めになっている面に脚を取付けていきます。
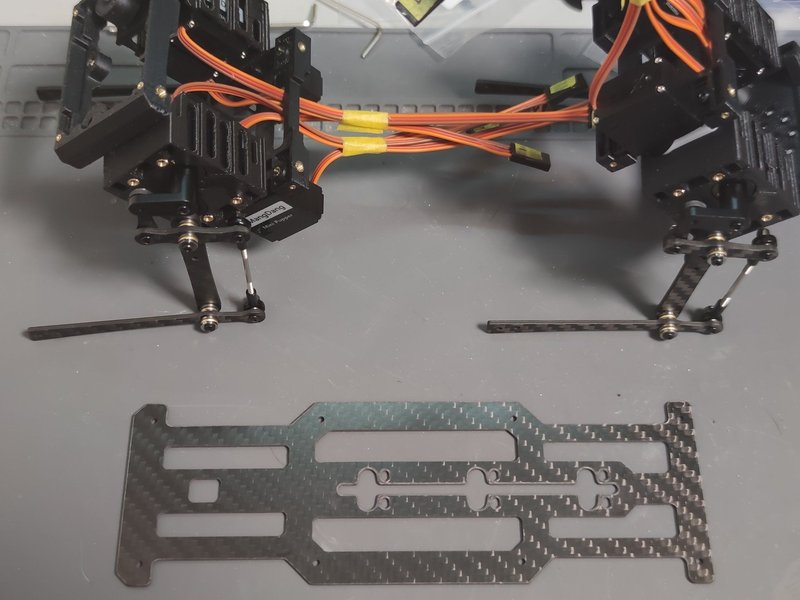
まず前側の脚をM2x5mmのボルトを4本使用してボトムプレートに固定します。ボトムプレートの前後を間違えないように注意してください。
同様に後側の脚もボトムプレートに固定します。
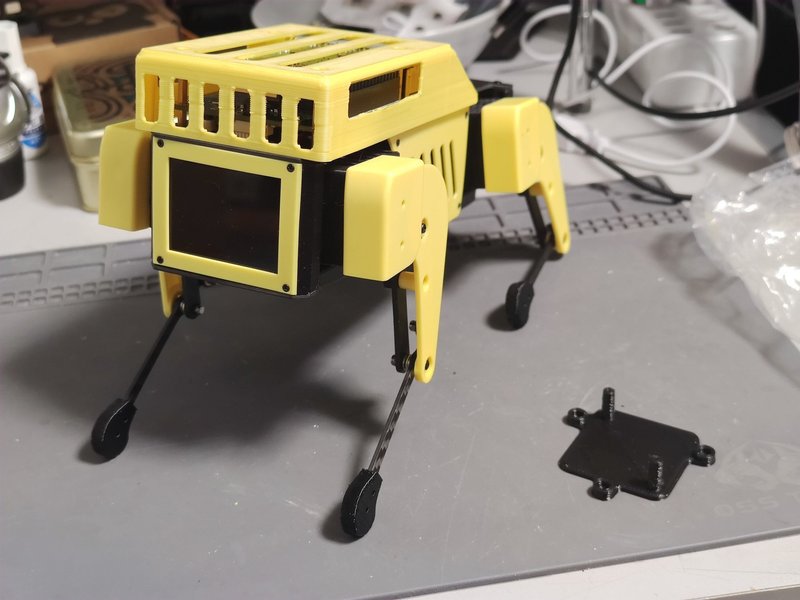
ボトムプレートに脚を固定することで、Muni Pupperが立ち上がりました。
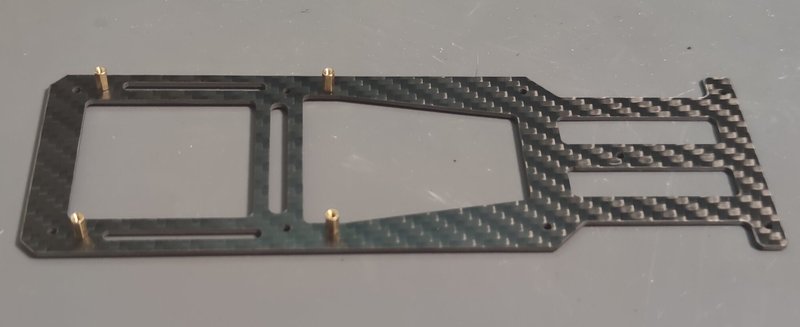
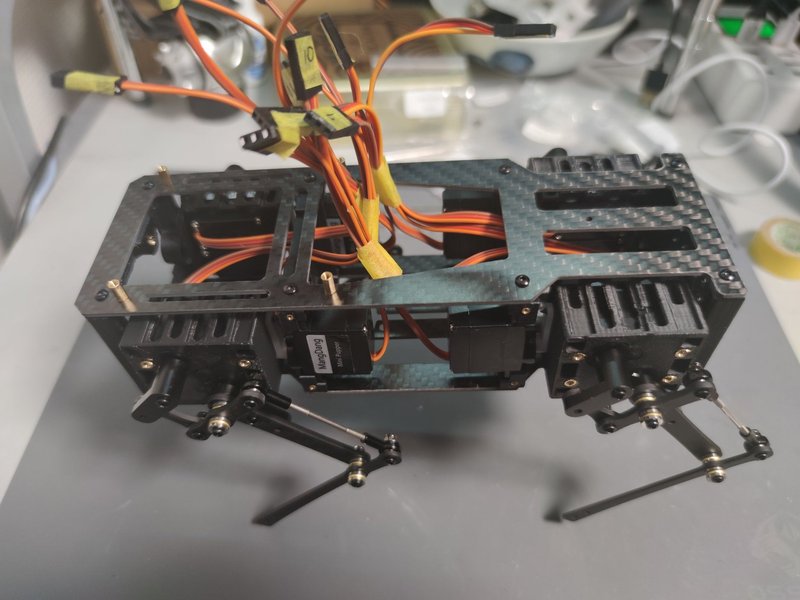
トッププレートの取付け
次にトッププレートを取付けます。
まず、トッププレートにM2x5mmのボルト4本と短い支柱4本を使ってコントロールボード(カスタム回路基板とラズパイ)を取り付けるための支柱を立てます。
M2x5mmのボルトを8本使用して、トッププレートを本体に取付けます。
液晶パネルの取付け
次に本体前面に表情を表示する液晶パネルを取付けます。液晶パネルの保護シートはあらかじめ剥がしておきます。

制御基板を裏表に注意して、前面パーツにM2x5mmのボルト2本を使用して取付けます。
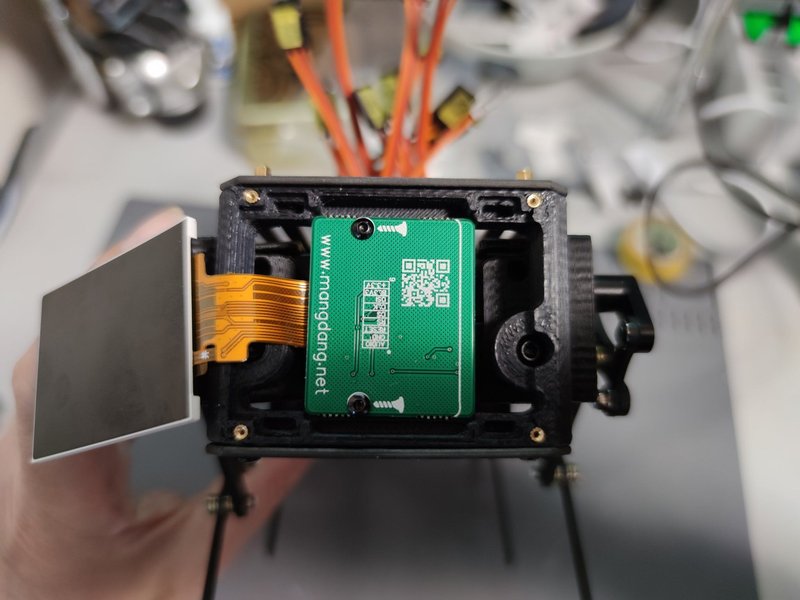
液晶パネルと制御基板をつなぐフレキシブルケーブルはパネルの端で軽く折り、フレキを前面パーツに押し込めるように液晶パネルを基板の前に置きます。
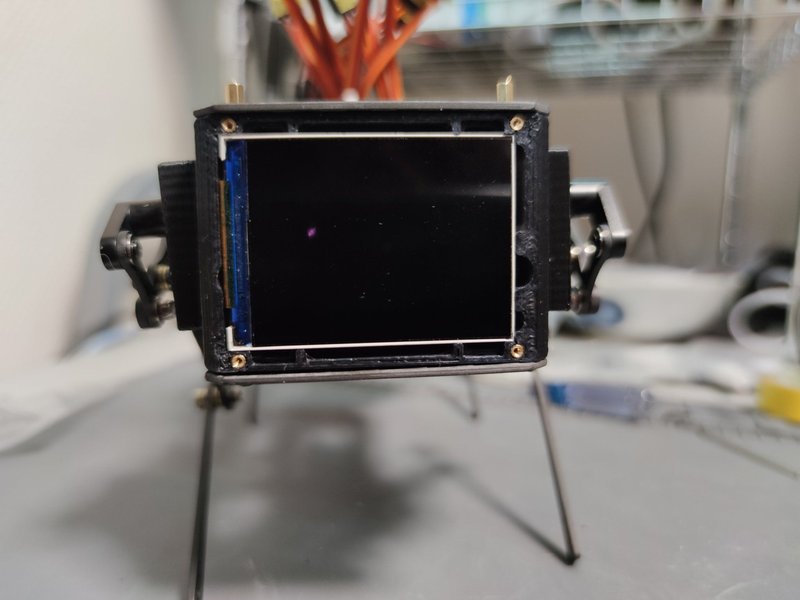
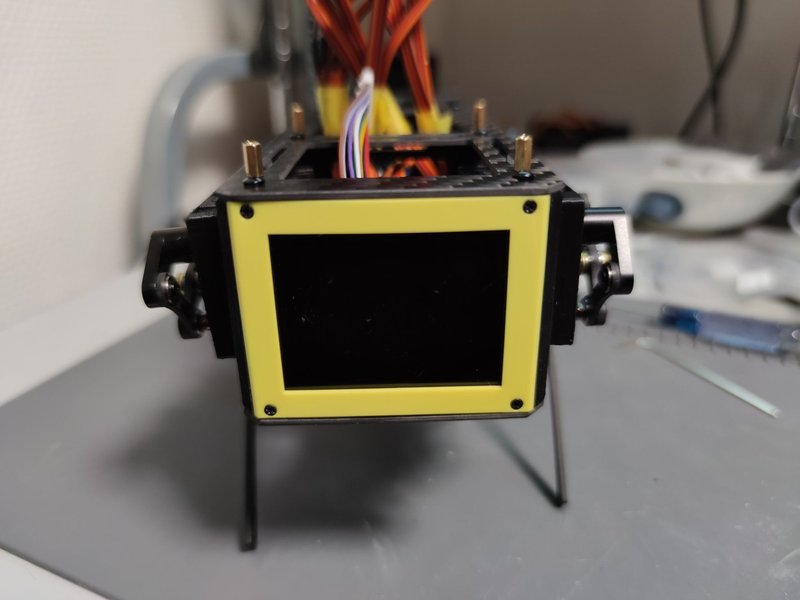
液晶パネルに黄色いカバーをかぶせて、M1.4x3mmの皿ネジ4本で固定します。
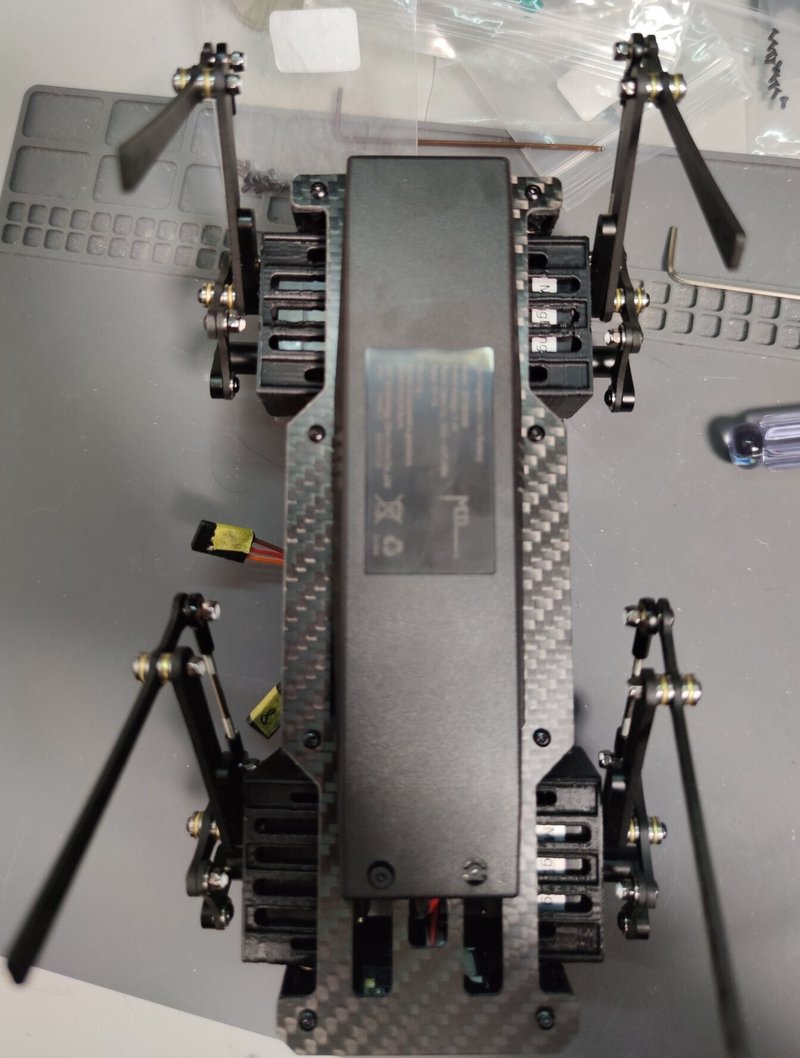
バッテリーパックの取付け
本体の底面にバッテリーパックをはめ込みます。先に前側の穴にバッテリーパックのリード線を通し、底面の穴に爪を合わせて、後ろへグッとずらして固定します。取付けは固めなのでバッテリーパック側の爪を少し起こしておいてから作業すると上手くいきます。
コントロールボードの取付け
次に、カスタム回路基板を本体に取り付けていきます。
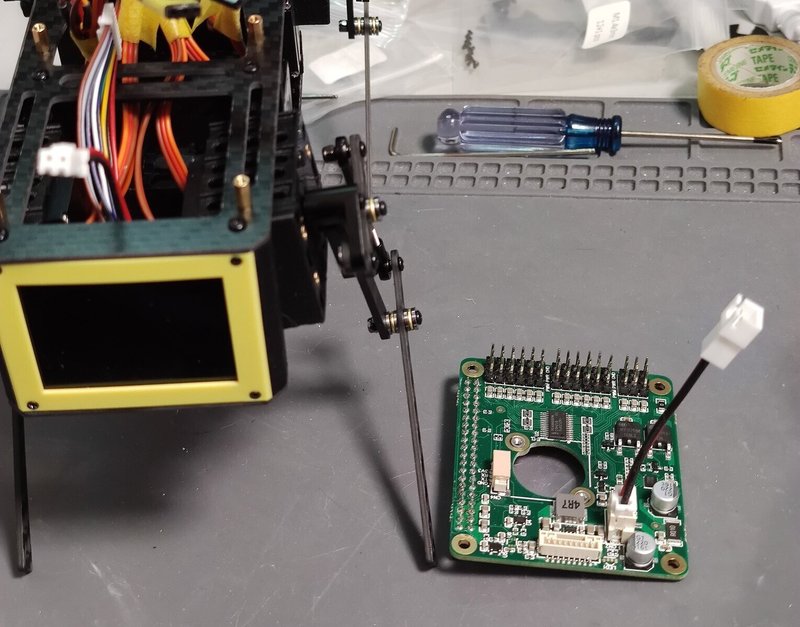
カスタム回路基板へのリード線の接続
まずは、液晶パネル制御基板とバッテリーのリード線をカスタム回路基板のコネクタに接続します。
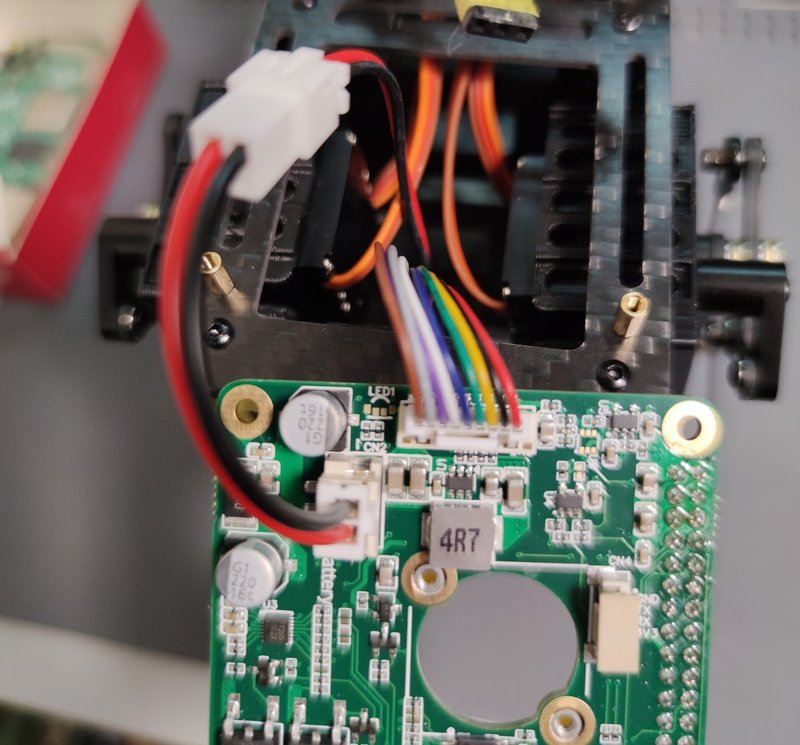
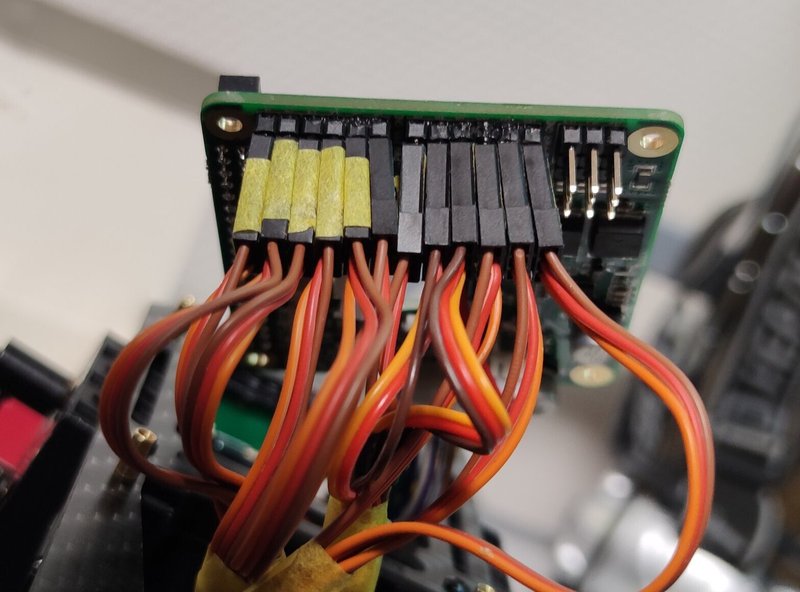
サーボのコネクタを基板のエッジ側をGNDにして、J1から順番に12個挿し込みます。ハウジングの上の方が少し厚くなってるので、斜めになって挿しにくくなりますが、気にせず接続していきます。
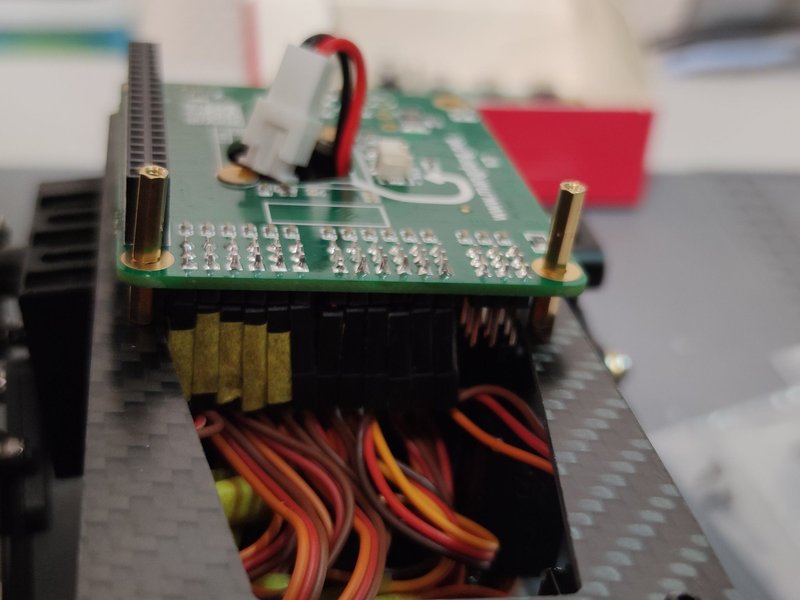
カスタム回路基板のトッププレートへの取付け
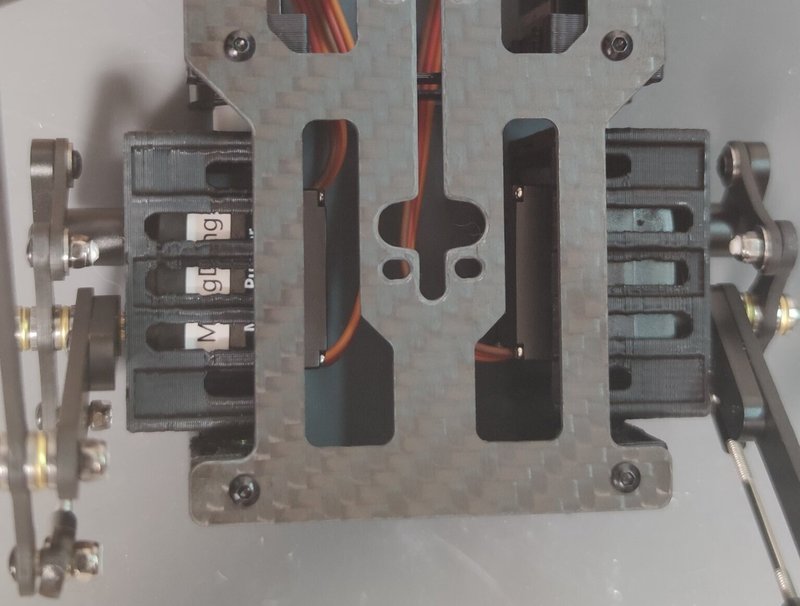
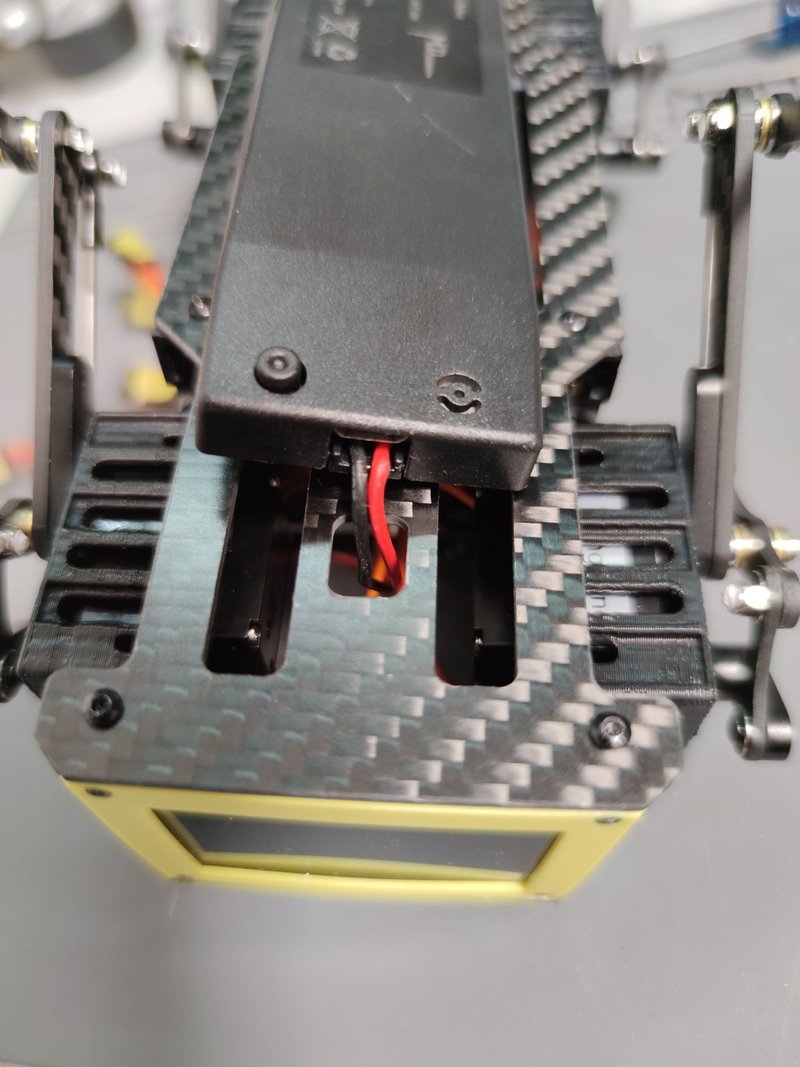
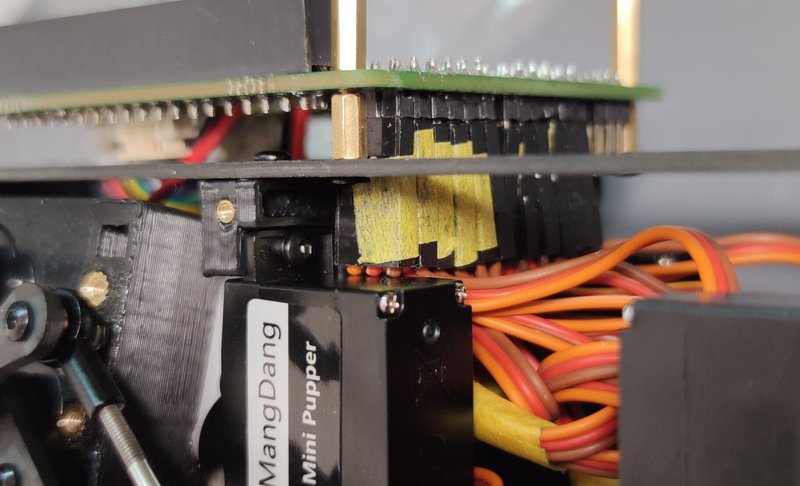
ボディ上部のプレートの穴にサーボのリードを押し込んで、押さえながら支柱でカスタム回路基板を固定します。
一番手前のコネクタは、サーボとの距離がギリギリですので、先にリード線を内側に曲げておいて、ちょっと無理して押し込みます。
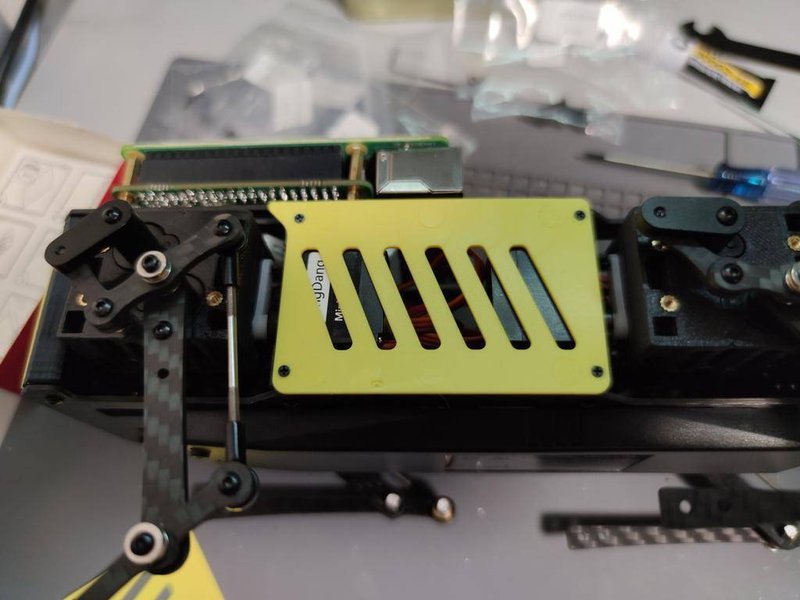
冷却用ファンの取付け
ビス穴部分の保護テープを剥がしてM2x8mmのボルト2本を使用して、冷却ファンをビスで取付けます。

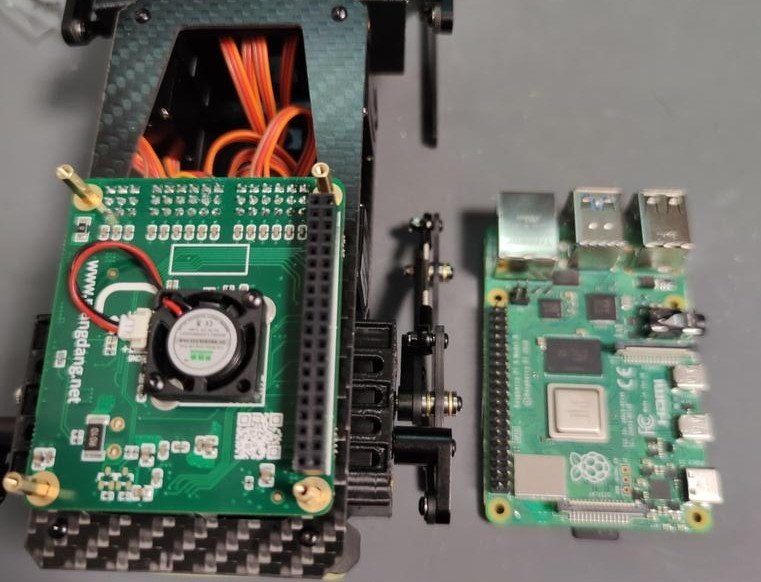
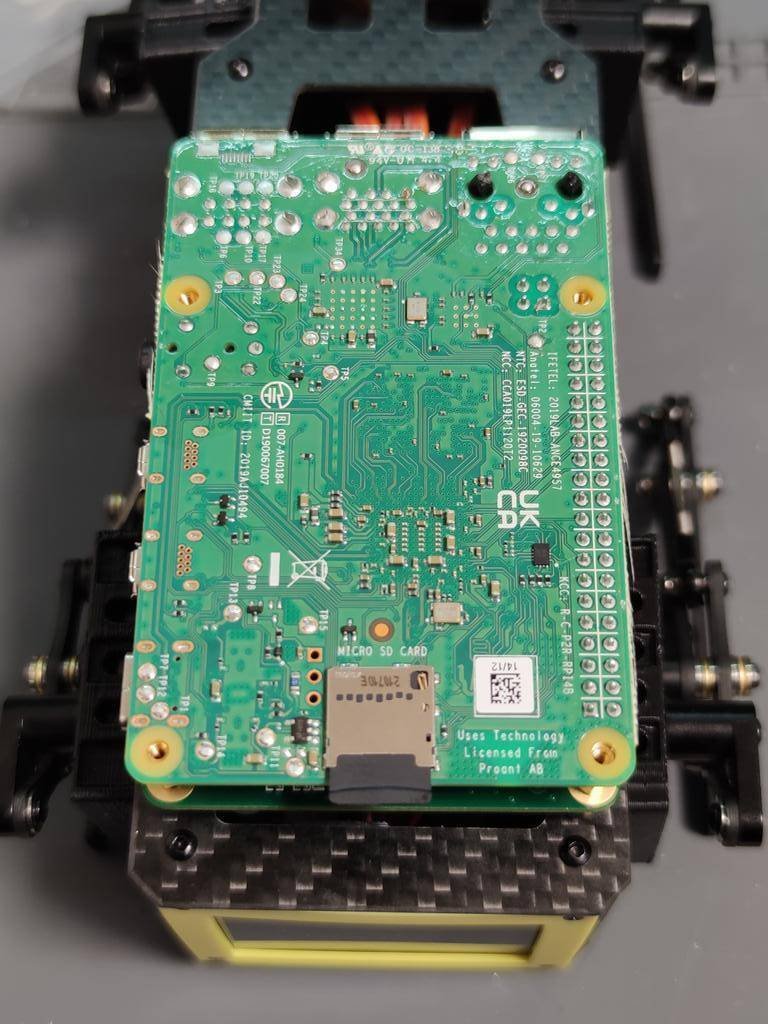
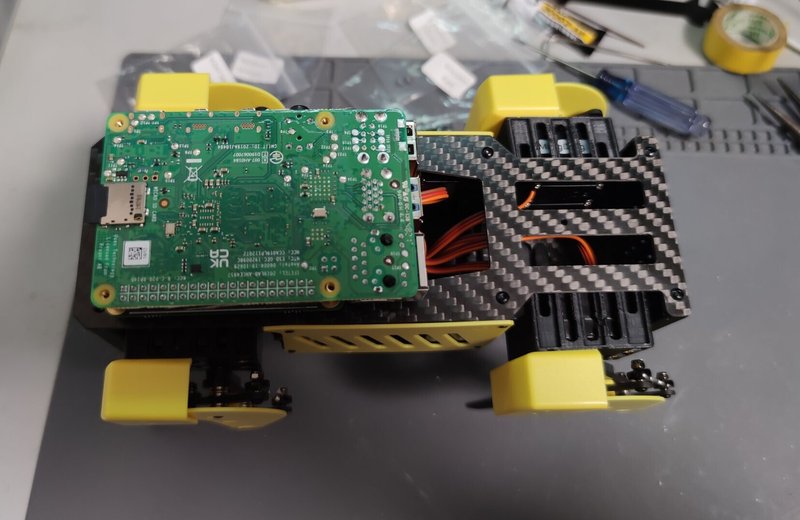
Raspberry Pi 4の取付け
カスタム回路基板の40ピンコネクタにラズパイの40ピンヘッダを挿し込んで装着します。
外装の取付け
サイドパネルの取付け
M1.4x3mmの皿ネジを8本使用して、左右のサイドパネルを取付けます。
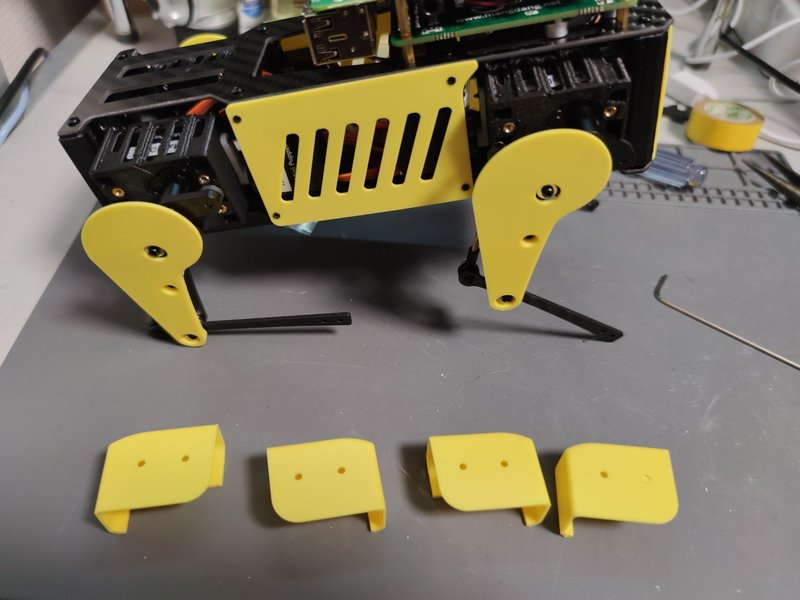
脚カバーの取付け
M2x10mmのボルトを各脚に1本づつ使用して、脚のカバーを取付けます。

肩カバーの取付け
脚の付け根に肩カバーを取付けます。M2x4mmボルトを各脚に2本づつ使用します。
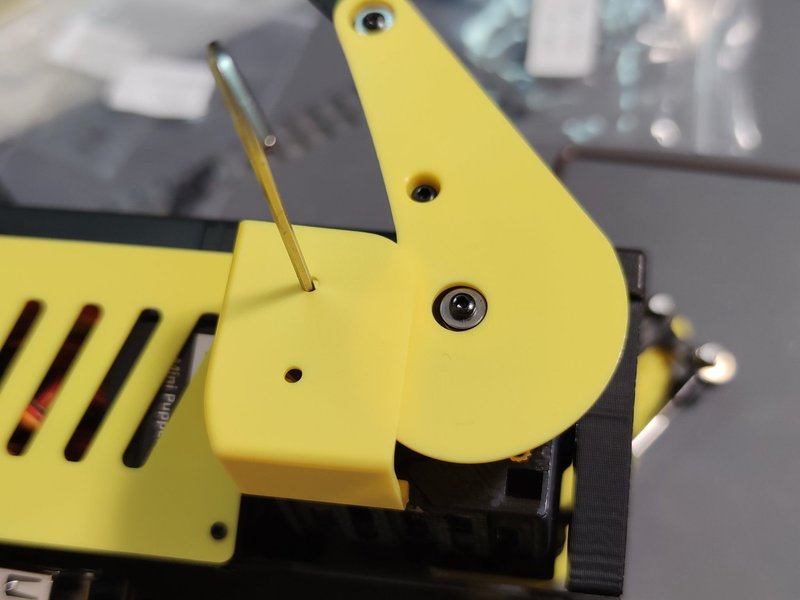
先にボルト2本を臀部パーツに仮止めします。
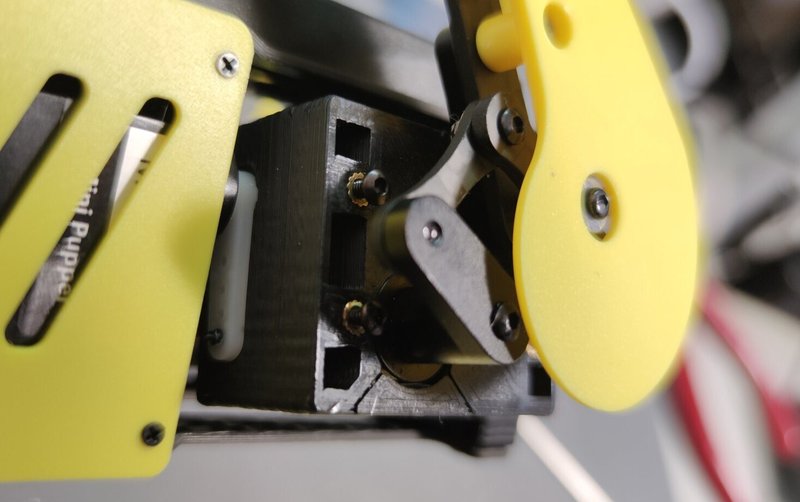
肩カバーを仮止めしたビスに引っ掛けます。

肩カバーの穴にレンチを通してボルトを2本締めつけて取付けを完了します。
以下の写真は全ての脚に肩カバーを付けた状態です。
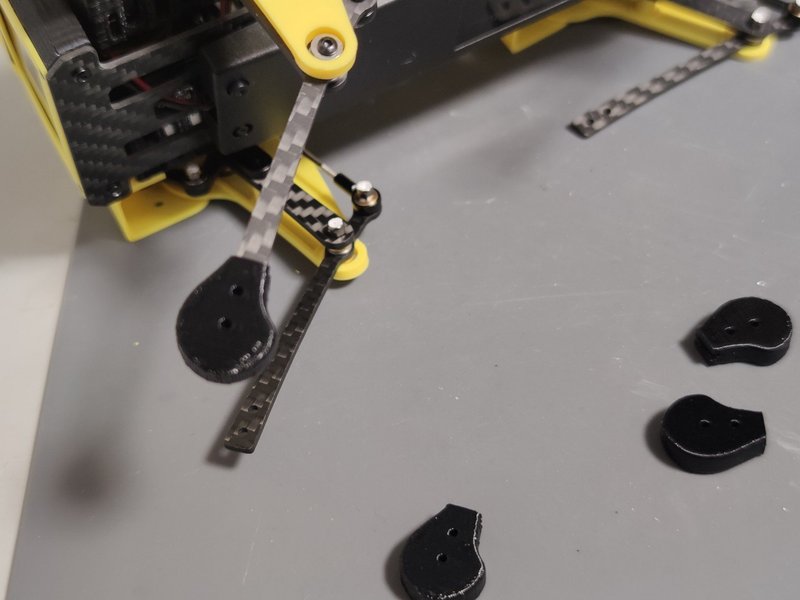
脚に靴を履かせる
4本の脚の先に黒い靴パーツをはめ込んで取付けます。
ソフトウエアの書き込み
トップカバーはラズパイを覆ってしまう形になりますので、取り付ける前に、ソフトウエアをmicroSDカードに書き込んでラズパイに装着しておきます。
SDイメージのダウンロード
以下のサイトより、カスタム回路基板のバージョンにあわせたSDイメージをダウンロードします。
今回付属していたカスタム回路基板はV2ですので、イメージファイルは
20220109_v1.7.0_MiniPupper_V2_PS4_Ubuntu_21.10.0_Baseline.img.zip
となります。
ダウンロードが完了したら、解凍してイメージファイル(*.img)を適当な場所に保存します。
SDカードへのイメージの書き込み
PCのSDカードリーダにmicroSDカードを入れて、イメージを書き込みます。
書き込みにはbalenaEtcherを使用しました。
イメージファイルはファイルサイズが15GBと大きく、書き込みに時間がかかります。組立作業と平行してあらかじめ書き込んでおくのがオススメです。
組立手順書のbalenaEtcherのリンク先からはダウンロードリンクが消えていました。公式サイトはこちらに移動していますので、こちらからPC環境に応じたものをダウンロードして使用します。
イメージ書き込みが終わったらラズパイにmicroSDを差し込みます。
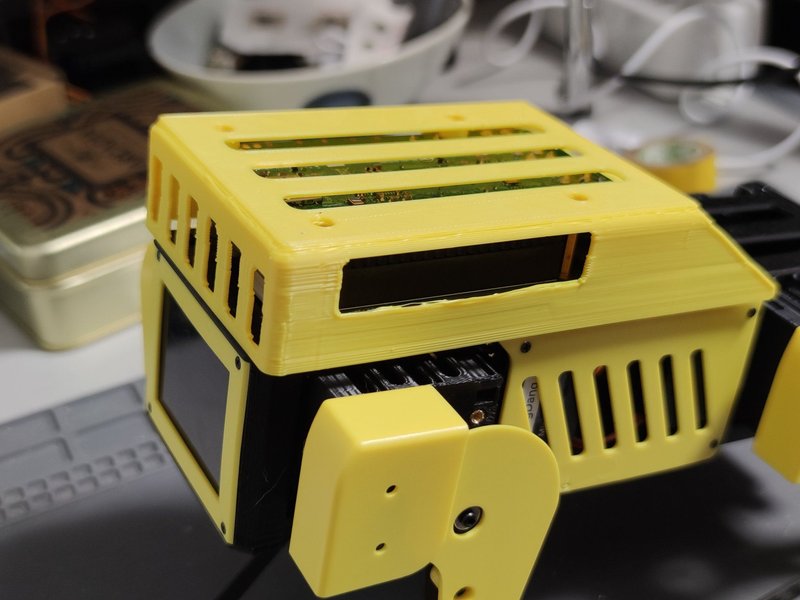
トップカバーの取付け
microSDをラズパイに挿し込んだら、トップカバーを取付けます。
取付けにはM2x10mmボルトを4本使用します。取付け穴が小さい場合は、あらかじめ穴を広げておきます。
ソフトウエアの初期設定
ソフトウエアの初期設定はラズパイにキーボードとマウスとモニターを接続して行います。
Raspberry Pi 4のコネクタはmicroHDMIなので要注意です。変換アダプタはダイソーで買えます。

バッテリーパックの底にあるボタンを3秒長押しすると、Ububtuが起動します。
しばらく待つと、デスクトップが表示されます。ログイン画面が表示された時は以下の情報でログインします。
初期ユーザ名:ubuntu
初期パスワード:mangdang
ユーザー名・パスワードは必要に応じて変更してください。

Ubuntuが起動したら、Mini Pupperの液晶パネルに顔が表示されます。

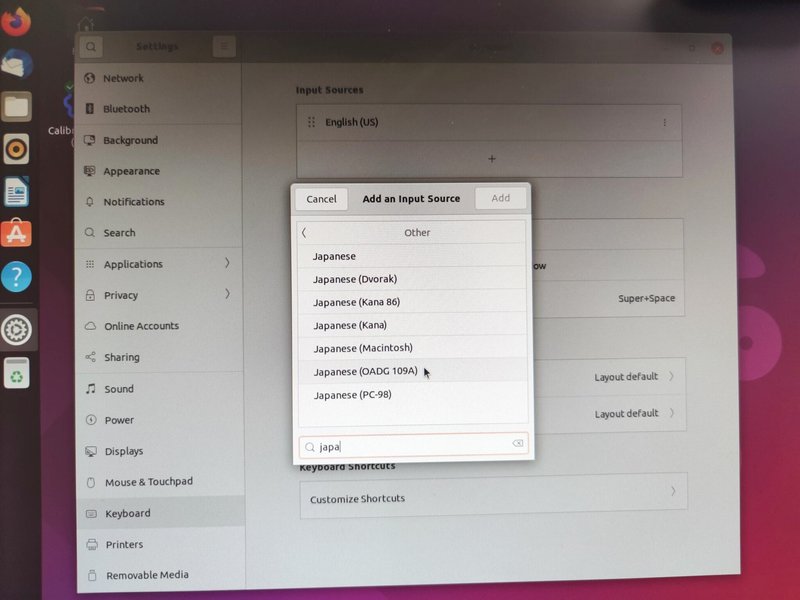
使用するキーボード設定を選択
Ubuntuの画面左下のメニューボタンを押し、 settings とタイプして設定を起動します。
Keyboard設定から使用しているキーボード(今回は日本語キーボード)を選択します。
Wi-Fiの有効化
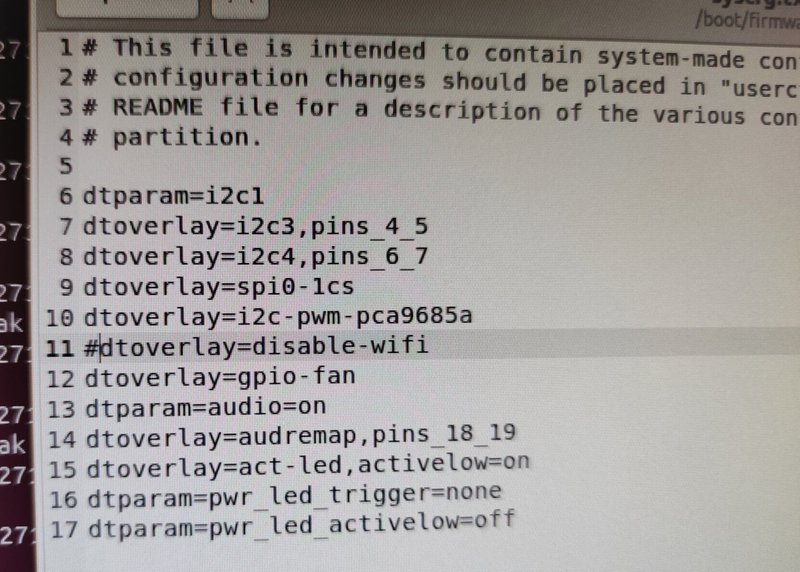
syscfg.txtを開いてdisable-wifiの部分をコメントアウトして再起動します。

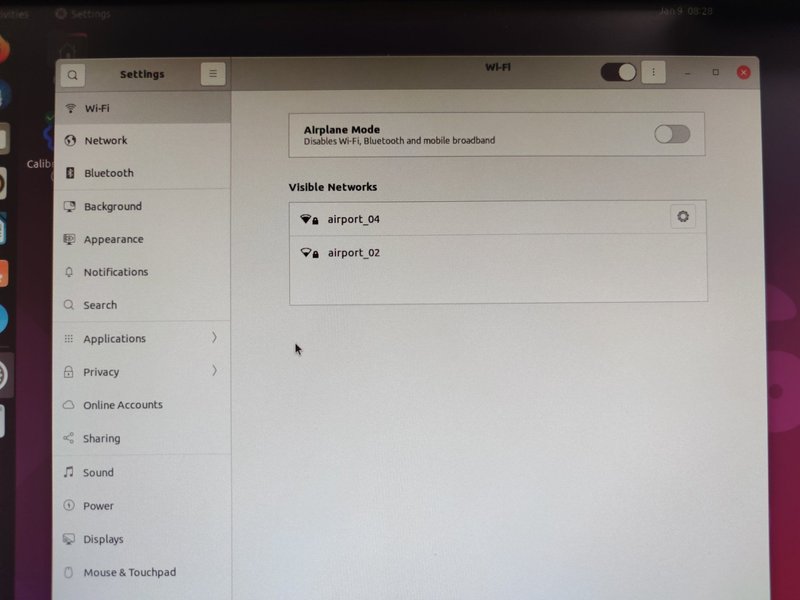
再起動したら左下のメニューボタンを押し、 settings とタイプして設定を起動します。
Wi-Fi設定から接続先のWi-FiのAP情報(SSID、パスワード)を設定して接続します。
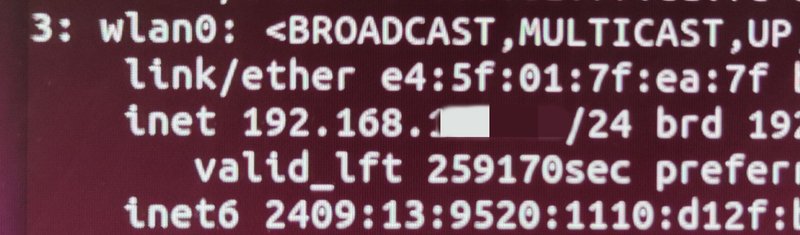
Wi-Fiの接続できたら、PSからSSHで接続するために、Ubuntuのterminalで
ip aと入力し、ラズパイのWi-Fiアダプタ(wlan0)に割り振られたIPアドレスをメモしておきます。
この時、ルーターからラズパイに固定IPを割り振るように設定しておくと良いでしょう。
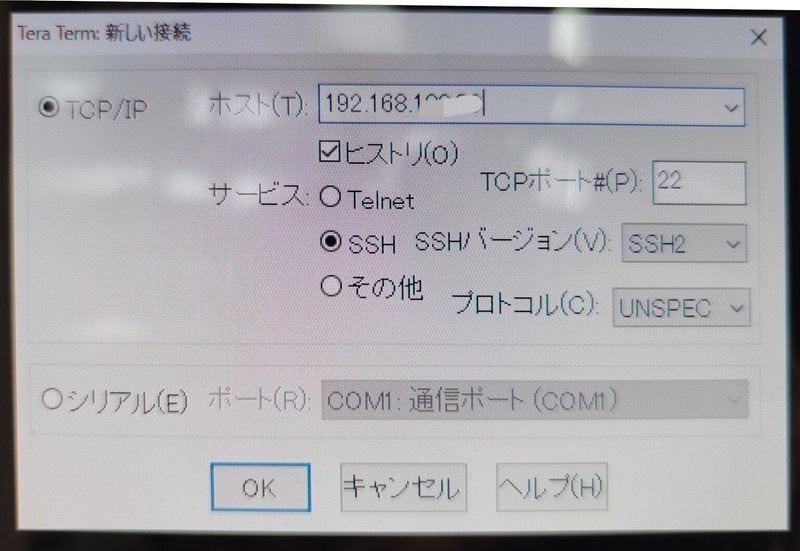
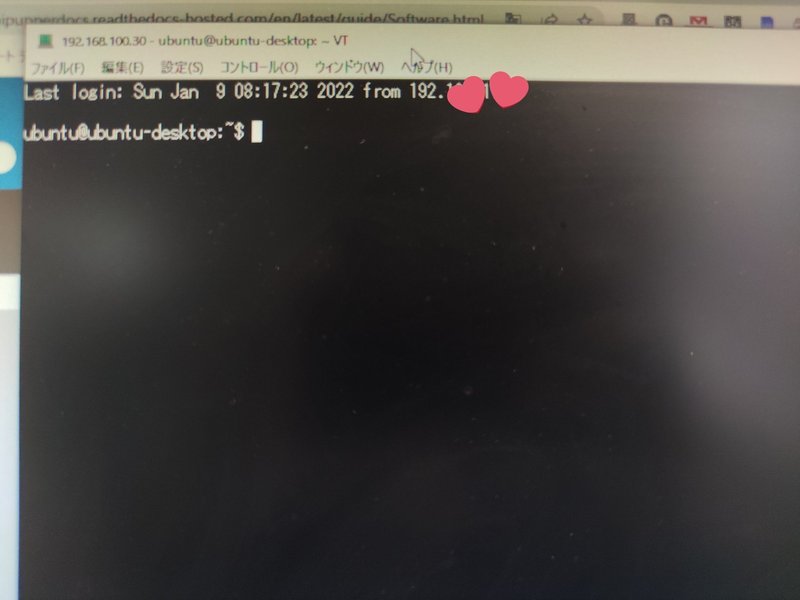
SSH接続の確認
PCに移動してターミナルソフト(この例ではTera Termを使用)からSSHでMini Pupperに接続できることを確認しておきます。
電源を切る前の注意事項
Mini PupperはUbuntuで動作しているので、バッテリーパックの電源ボタン長押しで突然電源を切ると、SDカードが破壊される可能性があります。
電源を切る前にUbuntu上でシャットダウン処理を行う必要がありますので、PCからSSH接続で下記のコマンドを打ちます。
sudo shutdown -h now30秒程度待てばシャットダウンが完了しますので、バッテリーパックの電源ボタンを長押しして電源を切ります。
または、リモコンの△ボタンを長押しでもUbuntuをシャットダウンできます。
本体のキャリブレーション
本体のキャリブレーションツールはUbuntuのアプリです。
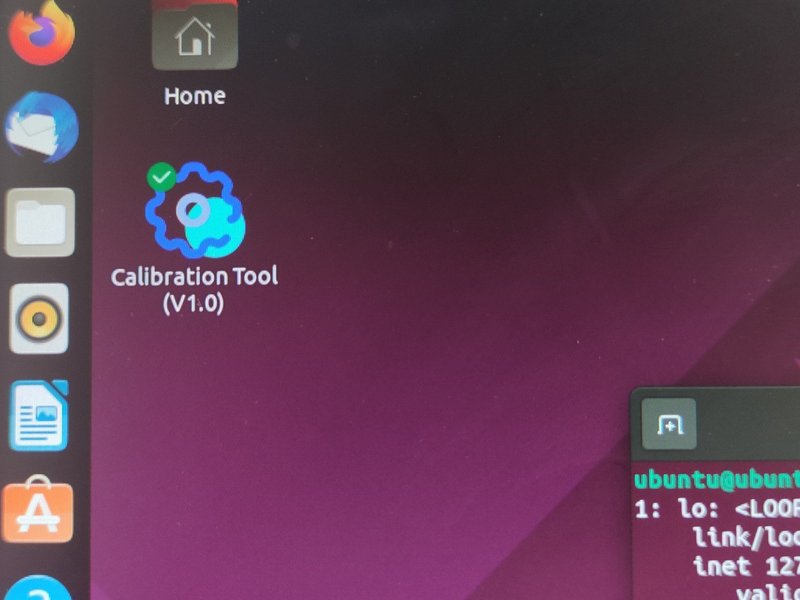
アイコンをダブルクリックしてキャリブレーションツールを起動します。
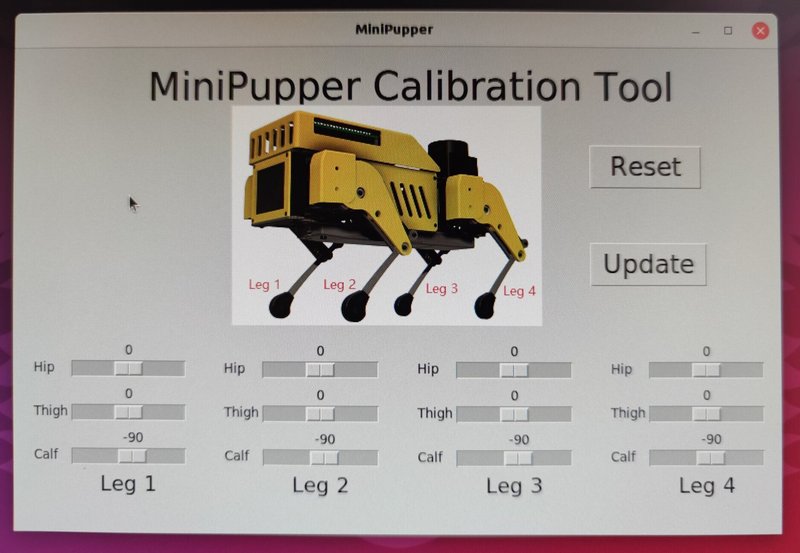
最新のファームウエアでは、キャリブレーションツールのスライドバーを使って4本の脚を以下の写真のように90度に設定します。
設定が完了したら、[Update]ボタンで設定を保存してツールを終了します。

キャリブレーションが完了したら、Mini Pupperをシャットダウンしてマウス・キーボード・モニターを外します。
Mini Pipperを再起動をすると以下の写真のように伏せの状態で起動します。

付属リモコンの「SHAREボタン」と「PSボタン」を同時に3秒以上長押しして、ペアリングモードにします。ペアリングモードではリモコンのライトが2回点滅します。
リモコンが本体に接続されると、リモコンのライトが緑色に変わります。
この状態でリモコンのL1ボタンを押すと、Mini Pupperの黄色くなって立ち上がります。

ペアリングが完了したので、早速Mini Pupperをリモコンで動かしてみました。これ、早送りとかじゃなくて実際の動きなのがスゴイ!(語彙)
よし!リモコンで動いた!これは楽しい!#100日後に動き出すMiniPupper
— tomorrow56 a.k.a. ThousanDIY(モ2済3未) (@tomorrow56) February 12, 2022
93日前倒ししたww pic.twitter.com/Vu0LGMS0nQ
狭いけど床に移動してR1ボタンでのトロットモードで操作。予想以上に前後左右に機敏に動くし、コントローラのジョイスティック操作が簡単でいい感じ。#100日後に動き出すMiniPupper pic.twitter.com/f5xwCk1j1J
— tomorrow56 a.k.a. ThousanDIY(モ2済3未) (@tomorrow56) February 12, 2022
リモコンでの操作方法は公式ドキュメントの"Robot operation"に記載があります。
まとめ
今回の組み立てを通してわかった組立の注意点を最後に記載しておきます。
付属品以外で組立に必要なもの
ロックタイト(修正液で代用)
爪楊枝(ロックタイトをビス穴に塗る)
M3用の六角レンチ(公式手順書では十字だけど、付属ビスは六角ボルト)
マスキングテープと細い油性マジック(マッキー)
あるとよいもの
ちょっと良いM2用の六角レンチ(付属はかみ合わせが緩い)
組立時の注意ポイント
ともかく、脚のパーツの組合せ(前後左右で微妙に違う)
サーボのリード長の使い分け
(サーボをビス止めすると成形品が脆いので外すのが大変)底面のプレートの裏表(自分は間違えました)
拡張するための参考資料
Mini Pupperの公式ドキュメントには、拡張するための手順書が公開されていますので、これからも色々と遊べそうです。
拡張機能(液晶画面のアニメーション表示等)
SLAM & Navigation
MangDang社のGitHub
最後に、もう一度クラウドファンディングへのリンクを貼っておきますので、興味を持った方はぜひPledgeしてみてください。
Kickstarter
Makuake
では、素敵なMini Pupperライフを!
よろしければサポートお願いします。分解のためのガジェット購入に使わせていただきます!