
第46号:新型アームの開発状況(2022年8月5日配信)

💡過去に配信したトクイテンメルマガを再投稿したnoteです。面白いなと思ったり、気がついたことがあればぜひ、SNSなどで感想をお願いします!
新型の収穫ロボット用アームを開発しています。
今回のバージョンでは高い場所のトマトでも収穫できるように、高さ方向を延長して1m程度の高さになりました。前回のバージョンでは市販の50cmの昇降機を使っていたのですが、やはりもう少し高い場所をにも届くようにしたいということで1mの昇降機を自社開発しました。デカいです。

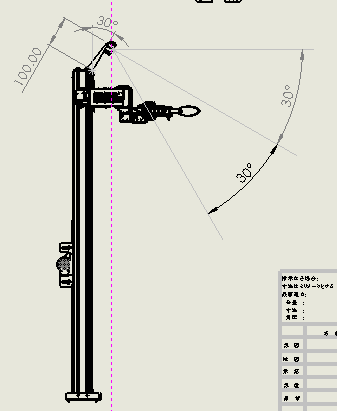
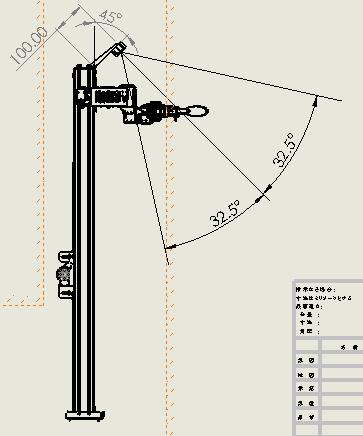
深度カメラの位置の検討
現在、トマトの位置を検出するための深度カメラ(Realsense)の位置や方向を検討しています。上部、中部、下部と三箇所にカメラを設置した時の視野角を3D CAD上で描きました。それぞれに一長一短があるかなと思っています。高くなった分、正確な深度の計測にも限界があるので一台では全体を網羅できない可能性もあり、複数台のカメラも考えていますがその場合にはUSBアダプタの通信帯域や電源の問題(Realsenseは電源の供給が不安定だと、エラーがでて使えない)もあり、工夫が必要になると思います。(ラズパイを複数台使うか…)


再来週のテストに向けて順調にハードウェアの開発が進められていると思います。ソフトを完成させてテストをしたいと思います。
これまで、参加いただいている開発者の方々の技術力が素晴らしく、早く適切な品質のものづくりができていると感じます。ロボット研究でも、素早いものづくりとテストを繰り返すラピッドプロトタイピングの流れがあります。ただ、ヘタをすると適切なテストをするのに達していない品質で、取り敢えずのテストを繰り返してなかなか目標に到達しないパターンもあると感じています。現状のトクイテンでは、開発とテストのサイクルが適切に回っていると考えています。
引き続き頑張っていきます。
持続可能な農業をつくる仲間を募集中
我々のミッションに共感してくれる方からの応募をお待ちしています。未来の農業をつくるというチャレンジのメンバーになりませんか?