人追従ロボット開発② 基本動作設定

こんにちは 日本維新の会衆議院支部長の寺島みずひとです。
世間は臨時国会開催や衆参補選など大変政局が不安定な状況ですが、構わずマイペースにコツコツやっていきます
そんなわけで昨日に引き続き人追従ロボットの開発を続けていきます。昨日はロボットの色認識まで行ったところまでいきました。
今日は実際に色認識によって認識した対象(緑色の対象)に対して向かっていく動作を作っていきます。といっても今回全面サポートをしていただいている橋本さんのほうで基本的なシステムを完成させており、今回の新仕様にあわせこんでいく感じではあります。ちなみに橋本さんが初期に開発されていたロボットの様子がこちら。
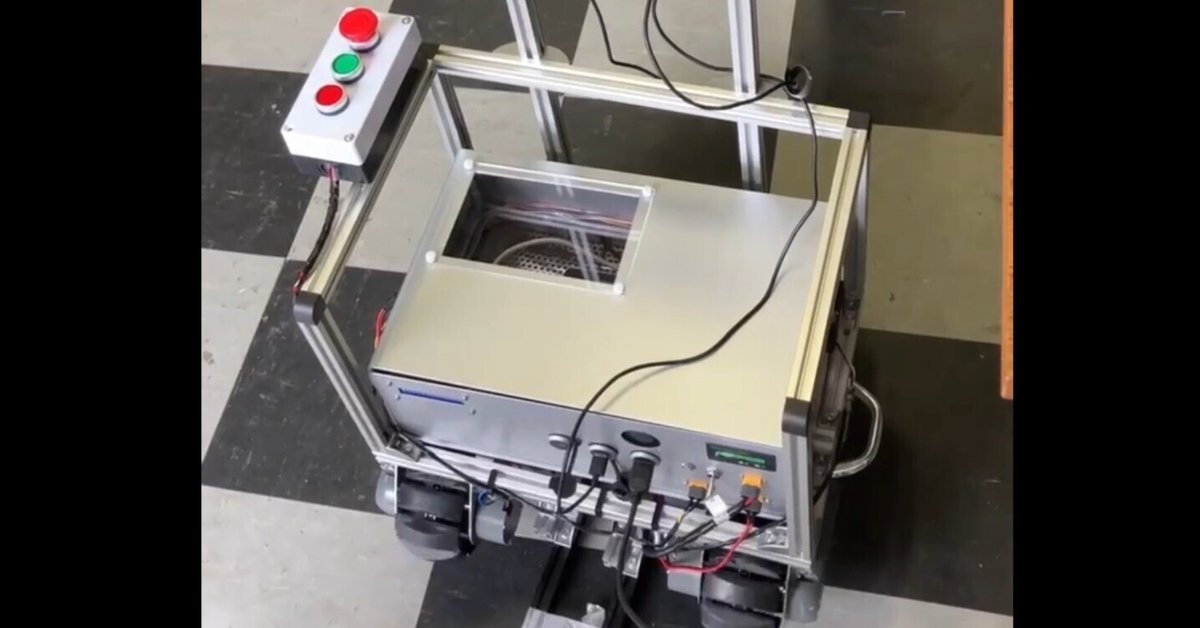
さて今回実際に以前までの仕様からハードウェアとして大きく変わったポイントとしてはロータリーエンコーダがついた点です。これまでDCの駆動モーターに直接PWM信号に基づいた電力をおくってたのみのフィードフォワード制御であったため、速度制御、加速度制御ができない状態でした。それが後付でエンコーダユニットがついたことでどちらの制御もできるようになったことでよりなめらかに人追従をしてもらえる仕様になることを期待しました。
そんなわけでまずは最初の頃の追従動作を模擬させてみます。主に色認識によって得た情報から対象者の距離と方向を割り出し速度指令に変換してモーターを回します。
本日の開発成果 維新カラー(若緑) を認識してある程度加減速と操舵ができるようになった。屋外走行は タイムリミットにより断念 pic.twitter.com/h0iQFULG7d
— 寺島みずひと @東京:日本維新の会 衆議院静岡8区支部長 (@simakaze01) October 1, 2023
ちゃんとそれっぽい動きをしていることを確認できました。今度は屋外で、、、と思ったのですがここでタイムアップ 次の予定があるので基本動作を確認して終わることになりました。本当は屋外でもしっかりためしたかったのですが次回以降とします。
ちなみに今回開発したロボットは10月13日(金)と15日(日)に浜松市中区船越町にある日本維新の会静岡県第8選挙区支部にて公開実験&デバックを行うので興味のある方は見に来て(手伝いにきて)ください。連絡はnoteにコメントいただくか。下記に連絡ください。
terashima.mizuhito@gmail.com
そんなわけで遅刻気味ですがこれから高専人会にいってきます。
また明日!!
この記事が気に入ったらサポートをしてみませんか?