
VORON v2.4製作メモ-7

Spider、3.3v問題について
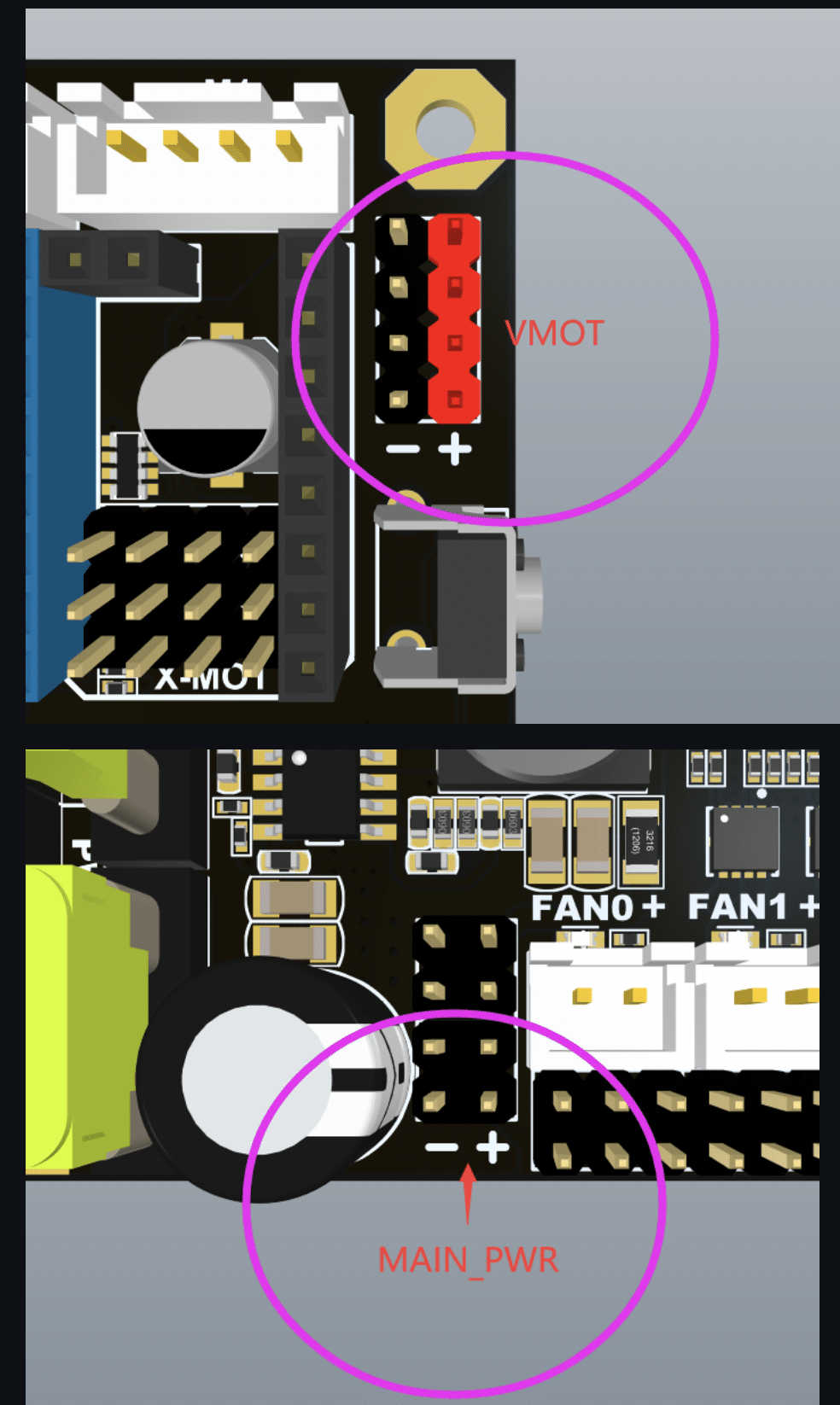
ボード上に備わっているコンデンサの残留電荷によりTMC2209ボードを挿したときにぶっ壊れる事が報告されています。
特にモーターを接続せずに電源を入れ→切ったあとにドライバー挿入などをする場合などにTMC2209が焼損するようです。(原因確定はされていない)
対策としてはボード上の下記端子プラス・マイナスに100kオーム程度の抵抗かケーブル接続(ショート?)で電荷を10分ほど抜きその後にモータードライバーを挿入してみてほしいという事でした。
新品も工場で電源を入れテストされているので同じ方法で取り扱ったほうが良いとのこと。
エレクトロニクス配置
SKR1.4x2枚積みだったものがSpiderボード1枚でスッキリさせれる様になりました。
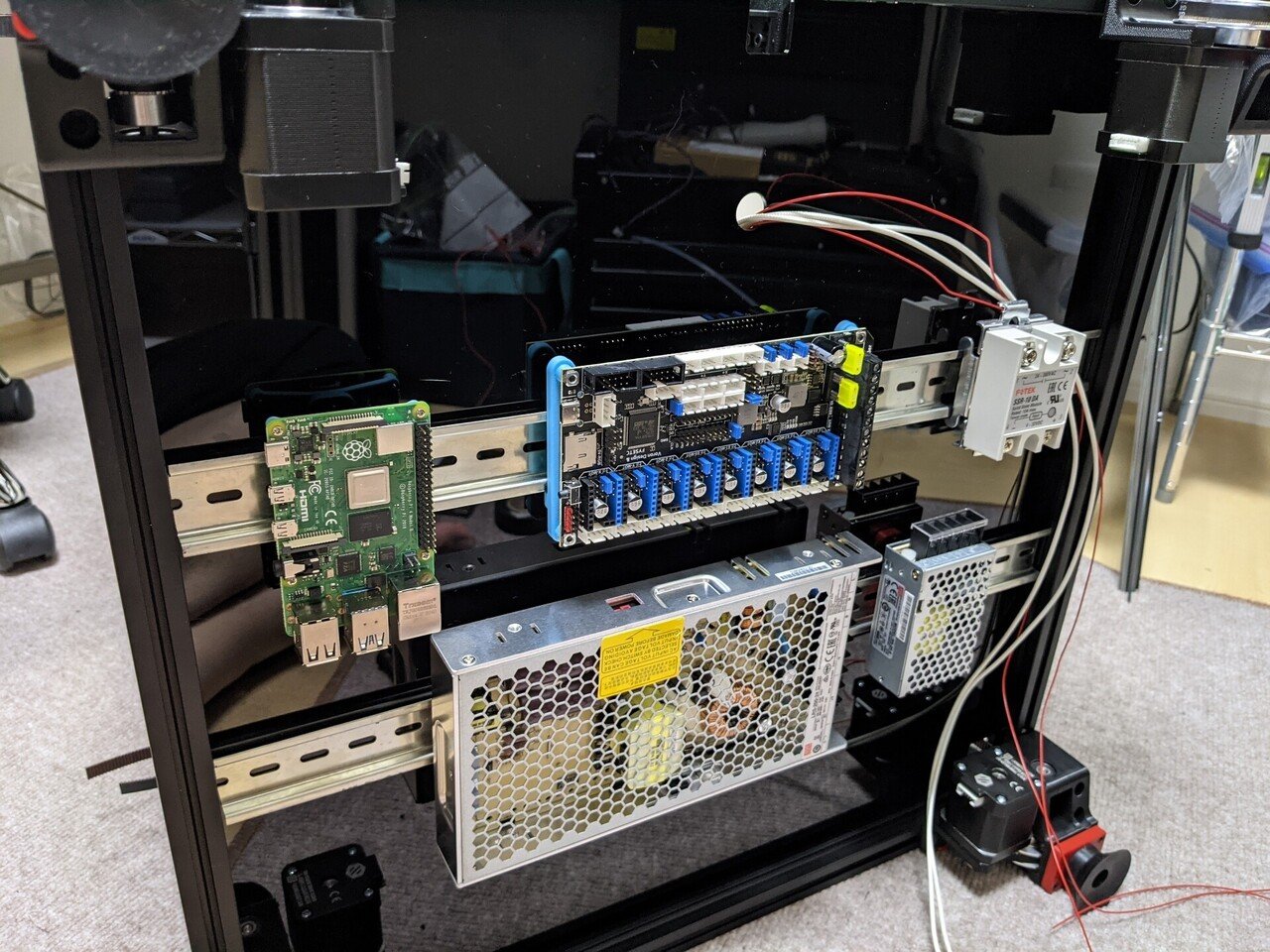
配置としてはこんな感じ。
写真は上がback側、下がfront側になります。
左右方向に冷却ファンの風が流れることになるので通り道に発熱体を並べました。
SSRは750wで使うには本来ヒートシンクあった方が良いみたいですので特にファン側(左右どちらにもファンは取付可能)に配置しました。
back側からガントリー関係のすべての配線が来ますのでその辺も短く済む配列です。
Spiderのマウントはv2.4のSTLには含まれていないのでgithubのUserMODよりコレを採用しました
ディスプレイの接続ケーブル長に注意
この配置にした場合付属の12864ディスプレイのケーブル(EXP1,EXP2)では届きません。
なのでUSB接続化する為に
STM32mini12864Module
を採用しました。
FYSETC STM32-mini12864 Voron mini12864 moduleで販売してます。
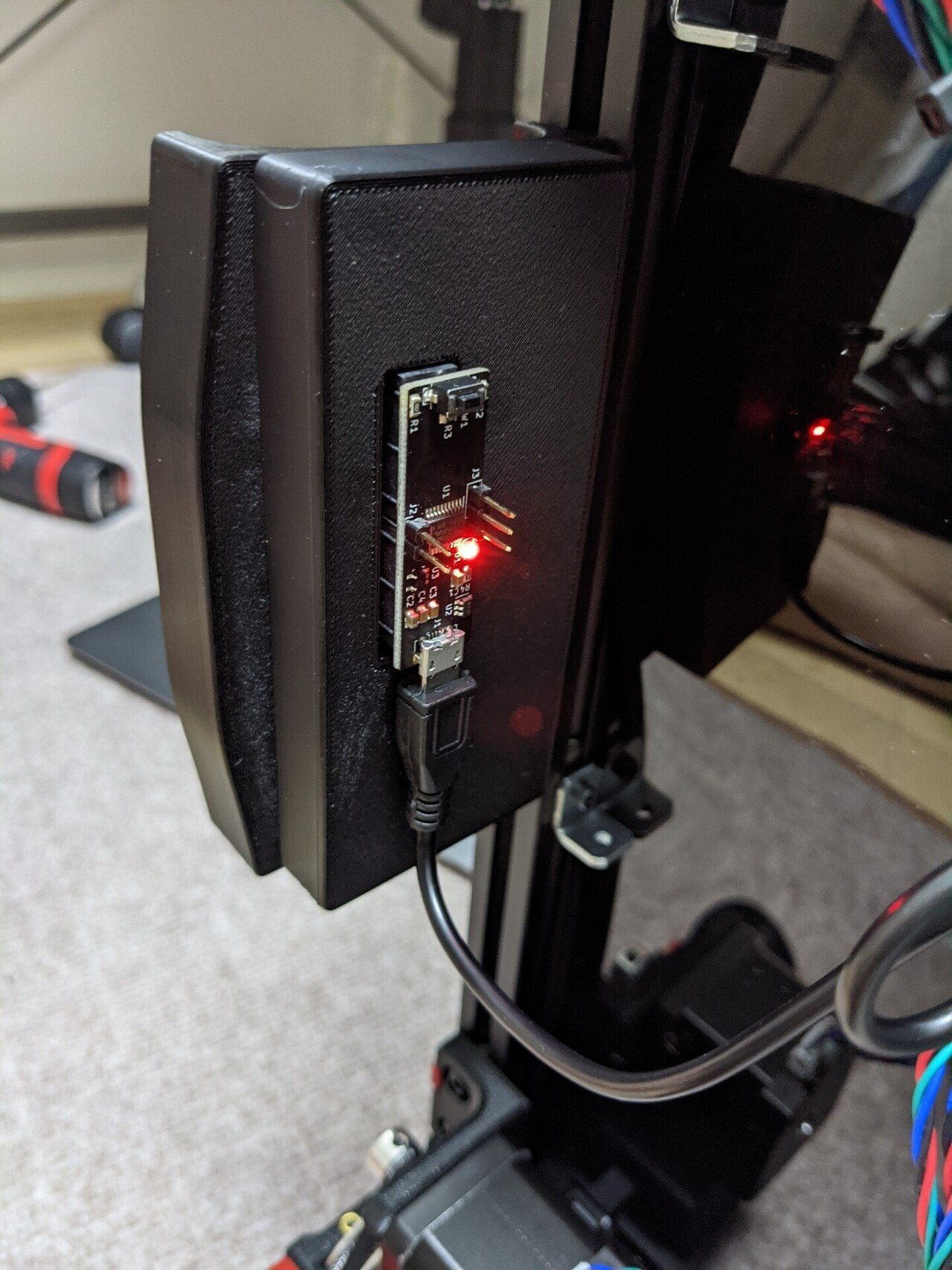
これにはklipper firmwareのインストールが必要です。前述のgithubに説明があり。2台目のMCUとして動作します。これでUSBケーブルの範囲で好きなだけ離せます。
AC配線のこと
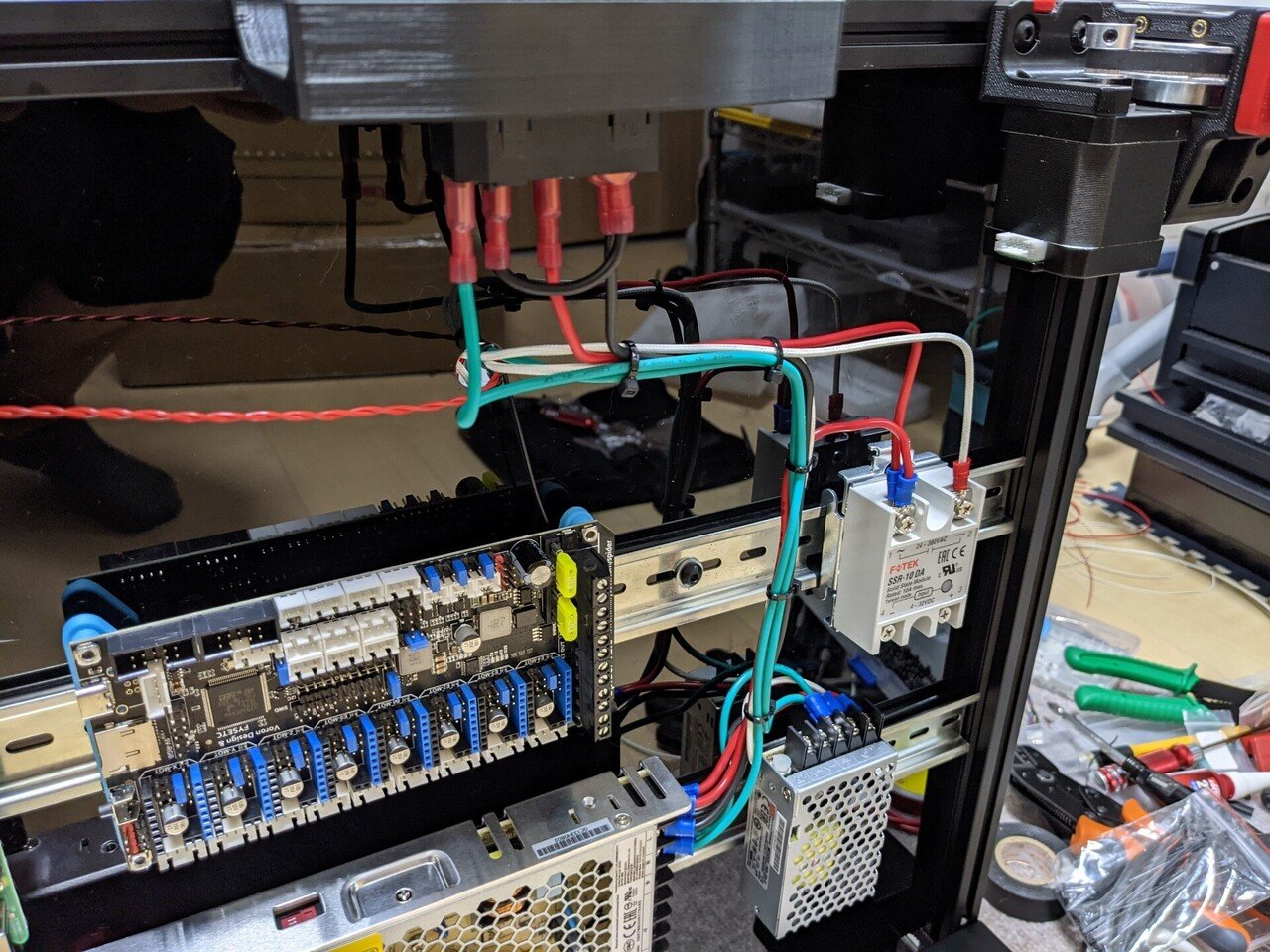
ベッドは600w以上有りますし、DC電源も総計225w積まれています。最低1.6sq使った方が良いでしょう。私はその辺に転がってた2sqで配線をしました。
ヒートベッド、電源ユニット類にはアースも一応配線しています。ただしコンセント側にアース無いと余り意味は無いかも。
5vスイッチング電源のこと
大飯食らいのRaspberryPi4用に5Vスイッチング電源が付属して来ます。が、Spiderボードにもオンボードの5V電源が積まれるのでそちらから供給しても大丈夫な仕様になっています。
Rpi-spider間のUART通信の専用ケーブルも付属してきます。
それらを使用する場合には5vスイッチング電源は不要になります。
『ネオピクセルで電飾ギンギンにしたい』等がある場合はspiderの5V容量では足らないことがあるので5Vスイッチング電源の搭載して下さい。
5V電源を搭載する場合の留意点
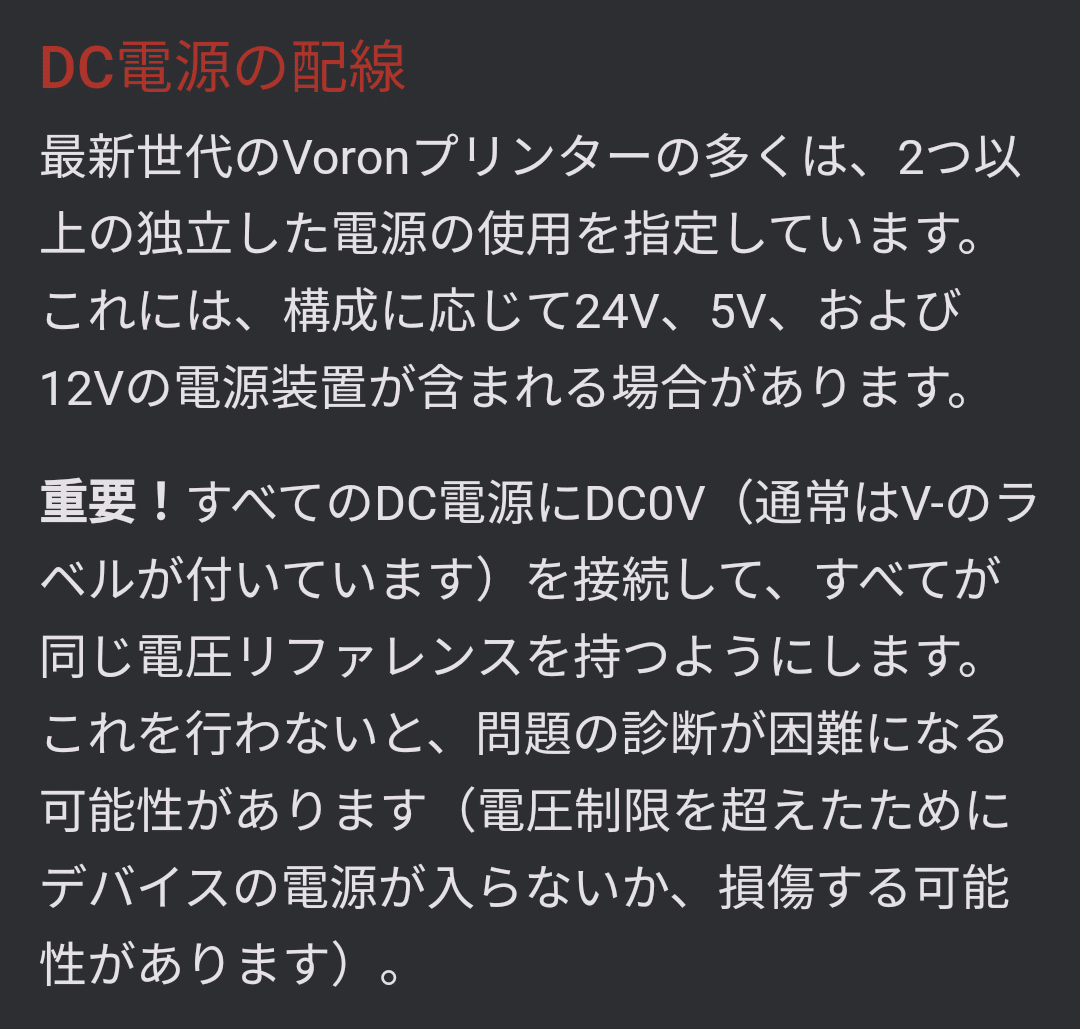
なんか何書いてるかパッとわからないですよね。
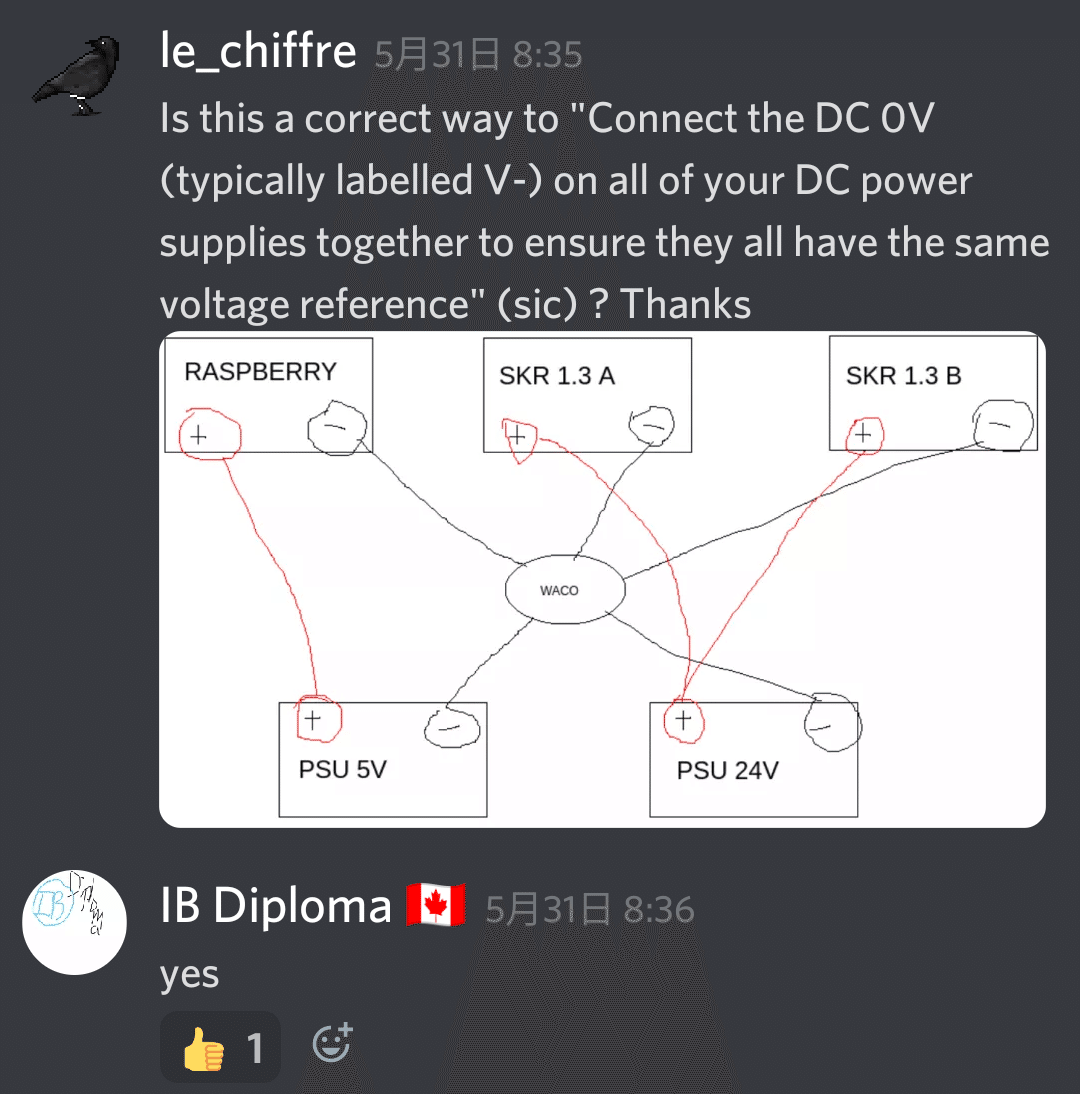
PSU(スイッチング電源)同士のマイナスを繋いで電位差を無くせということみたいです。別電源の機器を通信ケーブル等で接続した際にその電位差から通信ケーブルを通して電流流れ込んで不具合や故障をもたらす事がある様です。
細い線ですがPSUのマイナス同士を繋いでおきました。

モーター配線
書いているうちに本家VORON documentationがSpiderのページ追加されました。こちらをどうぞ
Spider v1.0と(FYSETC製の)mini12864についてはコネクタ方向、基板のシルク印刷、チップ部品の除去等の留意点があります。(自分はこの接続を行っていないので割愛😇)BTT製のディスプレイはそのままで問題無いようです
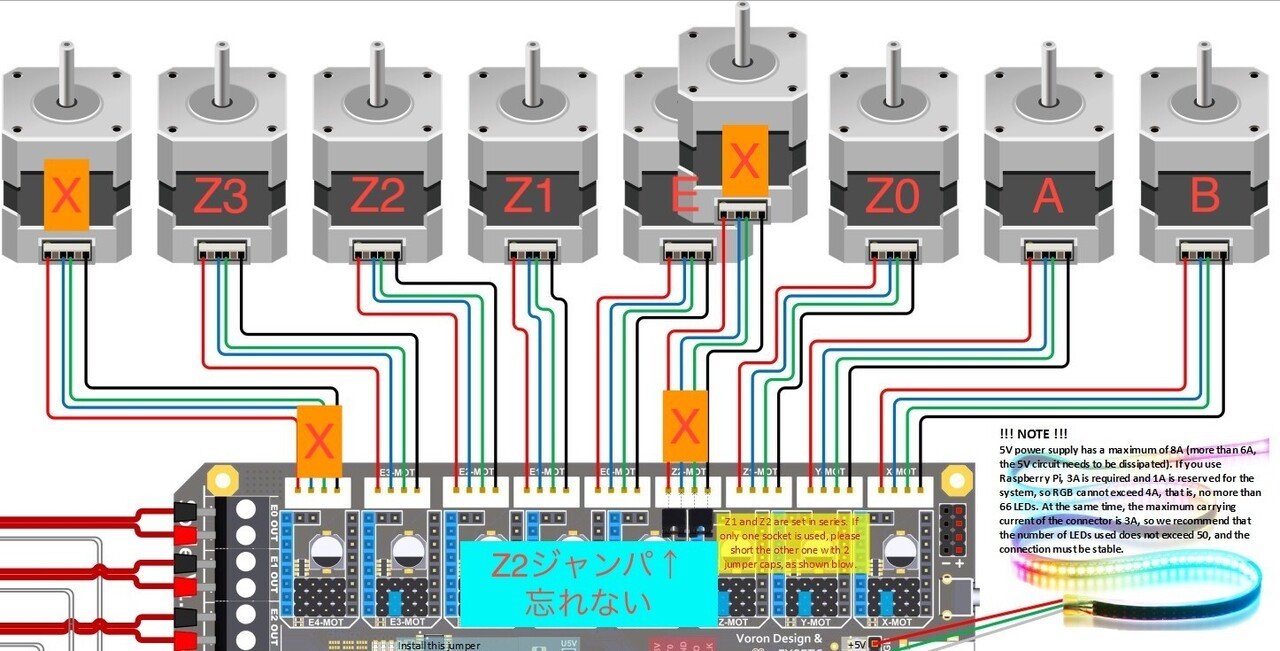
Spiderのgithubにあるprinter.cfgで設定するとモーター結線は図のようになります。LDOのモーターの場合配線色の並びが図と違いましたがA相B相は合っていました。
注意点は何も繋がないZ2端子には図のようにジャンパが必要。これをつなぎ忘れるとZ0モーターが動か無いです。
リミット・プローブ配線
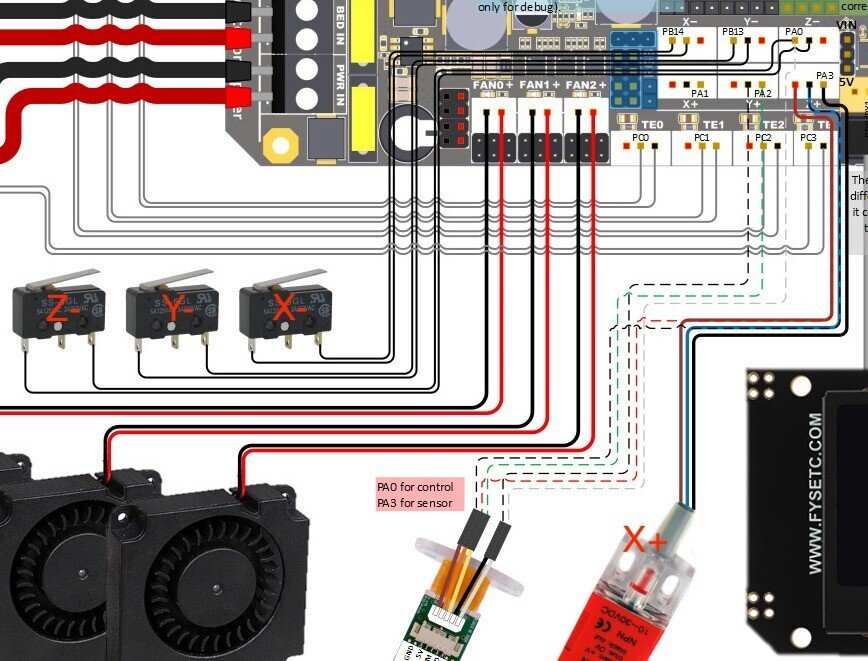
リミットスイッチはX-などの【○-】と書いてある方へ接続します。
図で見ると左側の2端子を使います。JST-XH 3ピンコネクタ使用
プローブは【Z+】端子へ。ボード側で対処しているのでビルドガイド等に記載のあるBAT85ダイオードなしで直結可能です。【Z-】横のジャンパはVin側の2本へ挿しましょう。
この記事が気に入ったらサポートをしてみませんか?