高専ロボコン2020開発記録

はじめに
この記事は著者(たひ)の視点から高専ロボコン2020の活動・開発を記録したものです。自分の関わりのない部分や他の部員が作業した内容等については省きますので予めご了承ください。
ルール発表
高専ロボコンのルールは例年、4月下旬に発表されそこからロボットのアイディアを考え、そこから試行錯誤を重ねロボットを作り上げていきます。ですが今年はCOVID-19の影響により全国的に防疫体制が広がり、不特定多数の人が集まるイベント等を中心に自粛が進んでいきました。もちろん高専ロボコンも例外ではありませんでした。
高専ロボコン運営陣は4月末にルール発表の延期を言い渡し、その後の5月末で”ロボコンに関するお知らせは6月上旬を予定”とまた延期、そして6月上旬”ルールの検討に方向性が決まりつつあります。準備期間が短いことを前提としたルールを想定しますので落ち着いてお待ちください。”...
だれか落ち着いて待てるかあああああこのク○野郎!!さすがに発表を2ヶ月近く待たされた身からすると辛かったです。
6月末になりようやくルールが発表されました。その名も”だれかをハッピーにするロボットを作ってキラリ輝くパフォーマンスを自慢しちゃおうコンテスト”...長い。
今年のルールを要約すると
・カメラ越しでパフォーマンスしてくれるロボットつくってね
・あ、在宅作業を想定してLi-poや圧縮空気の使用は禁止ね
・準備期間ほしいだろうから例年より大会を1週間くらい延ばすね
・配信環境はそっちでどうにかしてね
・あと、番組の素材ほしいからそっちで撮っておいてね
と言った感じで投げやり。
アイディア出し
ルールが発表されたタイミングと同じく遠隔授業から対面授業に切り替わり登校できるようになりました。
実際のミーティングでは
・VRMHD使いたいなぁ
・かわいいロボットつくりたい
・遠隔から動かしたい
・ロボットで授業受けれたら面白いじゃん
などのアイディアが出ました。
製作開始
7月
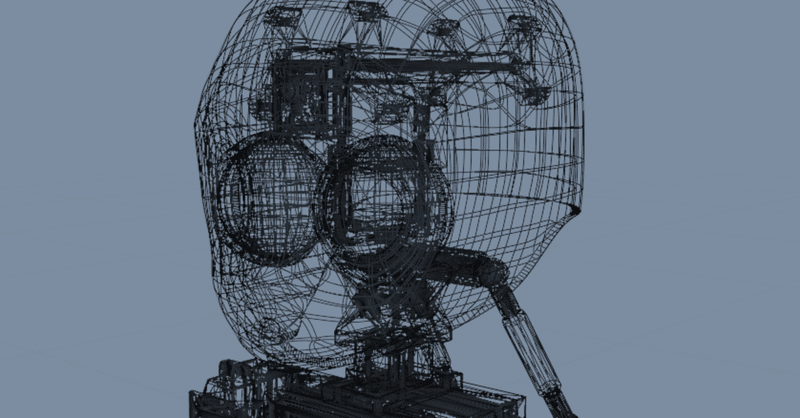
まずは、今回のロボットの肝、首のリンク機構です。他の記事でも紹介していますが、手繋ぎメイドロボットこと「ましろ」ちゃんの首を参考に設計しました。
新しいましろ上半身の
— A_say@ましろパパ 双子の妹ロボが生まれます (@A_says_) June 14, 2020
強化型差動首機構ができました。
安定した動作だ。剛性が違いますよ#MaSiRoプロジェクト https://t.co/DDoHSmWUhg pic.twitter.com/tRJvDBEXA2
8月

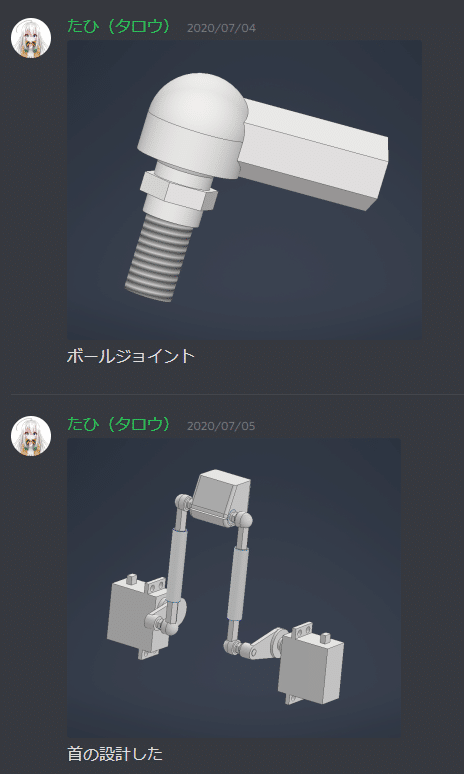
やっと首部分の初版設計が終わりました。この時点ではアルミ板と角パイプをメインにした剛性重視の設計でした。サーボモーターも大きいものを使っていました。


サーボモーターの変更等を加え、実際作ったものです。
9月
#ロボコン#久留米高専
— あぐちゃんさん❄️@久留米ロボコン回路 (@Agchan_Luice) November 2, 2020
ロールとピッチは軸ごとにモーターがあるんじゃなくて背中から2つのサーボで動かしてたりします
(この動画だとヨー軸がドリフトしてますが) pic.twitter.com/xOGnMUutrJ
↑首周りの仮組みを済ませ制御の試験

全体像の設計が終わる。
10月

↑ドールの顔を参考にロボットの顔をモデリング
— たひ@ (@Tahi_knct) November 2, 2020
やっとロボットらしい姿が見えてきました。
しかし、このままでは肩幅がとても広くとてもかわいいとは言えませんでした。ということで一週間で改修しましたw

— たひ@ (@Tahi_knct) November 1, 2020
実際にHMDを使っての動作もでき大会2週間にしてほぼ完成が見えてきました、やったぜえええチョンパァ!...
はい、フラグ回収ですね...
このタイミングでロボットの重量計測をしてみるとなんと顔と装飾を省いた裸の状態で”5[kg](迫真)"orz
またここから1週間でロボットの改修をすることになります。

はい、画像ではわかりにくいと思いますがもともとアルミやMDFだった部分のほとんどを樹脂系の素材に変更したり車輪を変更したりしました。
いざ、重量計測..."4[kg](迫真)"
やったぜえええチョンパァ!!!
ハードの完成が見えたが大会まで残り2日になってしまいました。
残りの時間で制御面の最終調整やパフォーマンスのアイディア練+練習をしていたら本番...


練習不足や回線の不調などなどパフォーマンスとしての出来はよくありませんでした。しかしロボットの動作を見せることはできました。

↑大会終了後のツーショット
まとめ
以上、僕の記憶と写真を頼りに今年のロボットが完成するまでの流れをまとめてみました。こうして今振り返るとロボット(ハード)ができるのが遅いw大会一ヶ月前にVer1ができるってどうなんだよw
うちの部はデスマする運命にあるのかなって思います。
この記事が気に入ったらサポートをしてみませんか?