
橈骨遠位端骨折を診る上で必要な知識②骨、関節

橈骨遠位端の骨構造
橈骨遠位端骨折の治療を遂行するために必要な橈骨遠位端部の機能解剖について記載する。特に掌側ロッキングプレート固定法を行ううえで重要な橈骨遠位端掌側面の骨・軟部組織構造の特徴については、解剖屍体標本を用いて行った解剖学的・組織学的研究の結果を交え、詳述する。
橈骨遠位端掌側部の局所解剖
肉眼解剖
橈骨掌側面で最も掌側に突出した点を結んだ骨性隆起線(以下、S line)上には手jt面側から観察すると、橈側と尺側に2つの隆起点が存在している。更に、尺側の隆起点は橈側のそれより大きく掌側方向に突出している。

これらと屈筋腱との位置関係では、長母趾屈筋腱(以下、FPL)は2つの隆起点の間の浅い溝の底部を走行しており、尺側の隆起点を起点として、その橈側平均10.5㎜(±1.2)部に位置している。また、示指深指屈筋腱(以下、示指FDP)は尺側隆起点の橈側を、中指深指屈筋腱(以下、中指FDP)はその尺側を走行している。

すなわち、術後断裂が頻発しているFPLと示指FDPはこの2つの隆起点の間を走行しており、同部でプレー恥やスクリューを橈骨のS lineよりも掌側に突出させないことが必須であると考えられる。一方、S lineは橈側では方形回内筋窩の最遠位の骨性隆起線(以下、PF line)に一致して存在するのに対し、尺側ではPF lineより遠位、すなわち月状骨窩関節面掌側縁に近接した位置に存在する。

組織学的検討
橈骨掌側面を最橈側部から最尺側部までの連続切片で観察すると、PF line

は、組織学的にも骨の変曲点として明確に観察される。肉眼所見と同様に、橈側ではS line

はPF lineと一致して存在するため変曲点は1箇所であるのに対し、尺側ではS lineとPF lineによる2箇所の変曲点が存在する。PF lineと橈骨関節面との間は強靭な橈骨手根骨間靱帯および関節包の起始部となっている。その起始部の幅は橈側では幅広く、尺側に向かうに従い徐々にその幅を減じており、舟状骨窩部では月状骨窩部のおおむね2倍である。方形回内筋の走行との関係では、PF lineと同筋の遠位縁とは必ずしも一致していない。Orbayらが報告した、方形回内筋と掌側関節包の間に存在する軟部組織構造である“Intermediate fibrous zone”は、S lineと方形回内筋遠位縁の間の結合組織として考えられ

橈側へ向うに従い徐々にその幅を減じ、舟状骨窩橈側では消失する。
“Watershed line”
Orbayらは自らが提唱した“Watershed line”という概念を紹介した論文のなかで、これらを越えたり、接したりしないことが屈筋腱損傷の防止に必須であるとした。しかし、文献上、この言葉の引用元は不明であり、言葉の定義自体も曖昧であった。また、解剖学書にも同部の詳細な記載はなく、グラント解剖学図譜では橈骨遠位端掌側部分のscaphoidおよびlunate fossaと方形回内筋窩の間に骨性の隆起した部分が図示されているが、明細な名称はつけられていない。またグレイの教科書でも、手jt掌側関節包付着部と遠位骨端線部分の差異が指摘されているに過ぎない。
“Watershed line”とは水系が2つに分かれる境界点を意味し、分水界もしくは分水嶺と訳される。したがって言葉の意味からすれば、橈骨遠位端掌側部における“Watershed line”は同部掌側面で最も掌側に突出した骨性隆起線、すなわち今回S lineとして示した線といえる。

しかしOrbayらの論文では、“Watershed line”はそれよりも明らかに近位に図示され、かつ本文でも”The pronator fossa is limited distally by a ridge called the watershed line”と記載されている。これらのことからOrbayらのいう“Watershed line”は方形回内筋窩の最遠位の骨性隆起線、すなわちPF lineと考えられる。

このような記載の曖昧さがその定義自体を不明確にした原因と思われる。
今谷らの行った解剖学的・組織学的研究の結果から、“Watershed line”を安全なプレート設置の目安と定義するのであれば、“Watershed line”は橈側1/3ではPF lineに一致して存在し、それより尺側ではS lineとPF lineの間に存在し、これは実際に使用するインプラントのデザインや厚みに応じて変化するhypothetical line(仮想線)であると表現することができる。

橈骨遠位端関節面の局所解剖
橈骨遠位端の関節面の形は遠位からみて橈骨茎状突起を頂点、尺骨切痕(sigmoid notch)を底辺とする三角形に近い。関節面には橈側と尺側に窪みを形成し、それぞれ舟状骨および月状骨と関節を形成することから舟状骨窩関節面(scaphoid facet)、月状骨窩関節面(lunate facet)と呼ばれる。
豆状骨

豆状骨は三角骨の掌側に位置しており、背側からは触れられない。豆状骨には尺側手根屈筋の他、小指外転筋が付着する。
三角骨

三角骨は掌側で豆状骨と関節を形成している。また、三角骨は橈側に月状骨、遠位で有鉤骨と関節を形成している。
月状骨

月状骨は近位手骨列の中央に位置する。また、遠位では有頭骨と関節し、手jt掌背屈運動の基本的構成単位である。尺骨では三角骨と、橈側では舟状骨と関節を形成している。
舟状骨

舟状骨は近位手根列の最も橈側に位置する。また、遠位では大菱形骨と尺側では月状骨と関節を形成している。短母指屈筋が付着する。
大菱形骨

大菱形骨は遠位手根例の最も橈側に位置する。また、遠位では母指中手骨とCMjtを形成し、尺側では小菱形骨と、近位では舟状骨と関節を形成している。短母指屈筋、母指対立筋が付着する。
小菱形骨
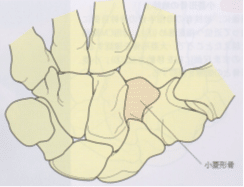
遠位では示指中手骨とCMjtを、橈側では大菱形骨、尺側では有頭骨と関節を形成している。示指、中指のCMjtは関節面の形態や靱帯結合の強靭さより、ほぼ完全に固定され可動性はない。
有頭骨

有頭骨は月状骨とともにflexion-extension columnを構成する。遠位手根列の中央に位置し、遠位では中指中手骨とCMjtを、橈側では小菱形骨、尺側では有鉤骨、近位では月状骨と関節を形成している。母指内転筋、短母指屈筋が付着する。
有鉤骨

有鉤骨は遠位手根列の最も尺側に位置する。また、遠位では環指、小指の中手骨とCMjtを形成し、橈側では有頭骨、近位では三角骨と関節を形成している。短小指屈筋、小指対立筋が付着する。
手jtのバイオメカニクス
手jtの運動は橈骨手根jtと手根中央jt、手根列内の手根骨運動の合成運動である。手根中央jtを構成する手根骨は、舟状骨、月状骨、三角骨からなる近位手根列と、大菱形骨、小菱形骨、有頭骨、有鉤骨からなる遠位手根列がある。これらの骨は靱帯により支持され、手jtの動きを可能にしている。これまで手jtの運動は、掌背屈と橈尺屈の2つの方向であると考えられていたが、近年これらの他に撓屈と背屈を組み合わせた撓背屈、尺屈と掌屈を組み合わせた掌尺屈という斜めの方向の運動が注目されている。この撓背屈から掌尺屈方向への運動はダーツを投げる動作に似ているためダーツスロー・モーションと呼ばれている。
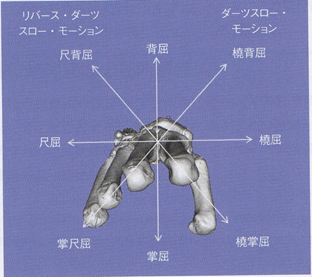
ダーツスロー・モーションは日常生活上よく使われ、最も生理的でコントロールしやすい手jtの動きであり、手根中央jtが動きの要であるといわれている。また、ダーツスロー・モーションに直交する撓掌屈から尺背屈への運動はリバース・ダーツスロー・モーションといわれ、

手根中央jtの動きが小さく、橈骨手根jtの動きが要となる運動方向であると考えられている。
橈骨手根jt
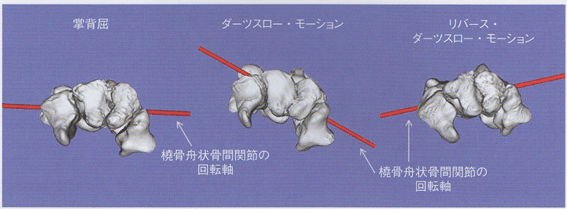
橈骨手根jtは橈骨舟状骨間(RS)jtと橈骨月状骨間(RL)jtから構成される。RSjtとRLjtは特に楕円jtであり、ある程度撓尺屈、回内外運動が可能であるが、その主要な動きは掌背屈運動である。
手jt撓尺屈運動での橈骨手根jtは、手根中央jtの運動方向とは反対の撓掌屈から尺背屈への運動が生じる。つまり、手jtが橈尺屈方向に動くときは、手根中央jtのダーツスロー・モーションでの余分な動きを橈骨手根jtに動くときは、手根中央jtの尺背屈への運動が生じる。つまり、手jtが橈尺屈方向に動くときは、手根中央jtのダーツスロー・モーションでの余分な動きを橈骨手根jtが合目的に補正し、全体として手jtが橈尺側に動くことが可能となる。たとえば、手jtが撓屈するときは、手根中央jtが撓背屈することにより生じる背屈方向のベクトルを橈骨手根jtが撓掌屈して補正する。
手jt全体がダーツスロー・モーション方向に動くと、橈骨手根jtでは手根中央jtとよく似た撓背屈方向への運動が起こる。

橈骨手根jtと手根中央jtの運動方向が似ているため、手jtのダーツスロー・モーション方向の動きは撓尺屈よりも可動域が大きく、また使用する頻度の高い運動方向であると示唆されている。更に、橈骨手根jtの可動域は撓尺屈からダーツスロー・モーションに近づくにつれ減少し、ダーツスロー・モーションから掌背屈に変化するに従い動きが増加する。また、RSjtとRLjtの動きは、手jtが矢状面からそれぞれ45°と30°の角度でのダーツスロー・モーションの場合にはほとんどなくなり、手根中央jtの単独運動に近くなるといわれている。よって、手jtの運動のなかで、ダーツスロー・モーションが最も橈骨手根jtの可動域が減少する運動方向である。
手jt掌背屈運動では、橈骨手根jtは掌背屈方向に動き、

橈骨手根jtの動きの比重が高くなる。しかし、最大背屈や最大掌屈では手根中央jtの舟状骨側のダーツスロー・モーション方向の動きが加わるため、背屈ではやや橈側よりに、掌屈ではやや尺側よりに手jtが動く。
手jtがリバース・ダーツスロー・モーション方向に動くときは、掌背屈側に傾いたリバース・ダーツスロー・モーション方向に橈骨手根jtは動く。
つまり、橈骨手根jtの運動方向が掌背屈側に傾いているため、手根中央jtが橈尺屈方向に動くことにより合目的に手jtの動きを補正し、全体としてリバース・ダーツスロー・モーション方向に動くことが可能となる。また、リバース・ダーツスロー・モーションのときの各jtの貢献度は、橈骨手根jtが非常に大きく、手根中央jtは小さい、特に舟状骨側は、S-T TCjtがダーツスロー・モーション方向に動くため、RSjtが動きの要となる。
手根中央jt
手根中央jtは、近位手根列の3つの骨と遠位手根列の4つの骨との間の関節であり、橈骨手根jtに比べ骨性支持力の強いjtである。手根中央jtを舟状骨側、月状骨側・三角骨側の関節群に分けて記載する。
舟状骨側
舟状骨は大・小菱形骨、有頭骨と関節面を持ち、舟状大菱形小菱形骨間(STT)jtと舟状有頭骨間(SC)jtを形成する。遠位手根列の大・小菱形骨、有頭骨の間には相互にほとんど動きがないため、STTjtとSCjtは同じ動きをすると考えることができる。そのため、大・小菱形骨・有頭骨(TTC)は一つのユニットとして捉えることができ、手根中央jtの橈側の動きは舟状骨に対してTTCが動く舟状骨―大・小菱形骨・有頭骨(S-TTC)jtの動きとして捉えるべきである。
S-TTCjtの動く方向は、手jtを掌背屈、ダーツスロー・モーション、橈尺屈のいかなる方向に動かしてもほとんど一定であり、その運動方向は撓背屈から掌尺屈への斜め45°方向のダーツスロー・モーション方向である。また、ダーツスロー・モーションに直交するリバース・ダーツスロー・モーション方向に手jtを動かした際も、S-TTCjtはダーツスロー・モーション方向に動いている。つまり、S-TTCjtは手jtの運動方向にかかわらず、ダーツスロー・モーション方向のみに動く。一軸性関節45°に貫通しており、

回転軸が舟状骨結節を撓掌側に出ていくところが舟状大菱形骨靱帯の起始部、尺背側に出るところが舟状有頭骨靱帯の起始部となっている。S-TTCjtの回転軸まわりの可動域は、橈尺屈で一番大きく、ダーツスロー・モーション、掌背屈になるにつれ小さくなる。また、掌背屈がリバース・ダーツスロー・モーション側に傾くと、S-TTCjtの動きはロックされたようになり、可動域は更に小さくなる。
月状骨・三角骨側
月状骨は有頭骨と月状有頭骨間(LC)jtを形成し、三角骨は三角有鉤骨間(TH)jtを形成する。月状骨と三角骨の間にはある程度の可動域があるが、それらの運動方向は、手jt運動方向にかかわらず、常によく似ている。また、有頭骨と有鉤骨の相互の可動性は非常に小さい。そのため、手根中央jtの月状骨・三角骨側のjt群は、月状骨-三角骨ユニットのjt(LT-CHjt)と考えることができる。
手jtの橈尺屈運動では、LT-CHjtは撓背屈から掌尺屈のダーツスロー・モーション方向に動き、LT-CHjtの回転軸は、有頭骨中心を通過し撓掌側から尺背側にかけて斜め約45°に位置している。また、手jtをダーツスロー・モーション方向に動かすと、LT-CHjtはダーツスロー・モーション方向に動くが、橈尺屈運動のときに比べ、少し掌背屈側に傾いたダーツスロー・モーション方向となる。
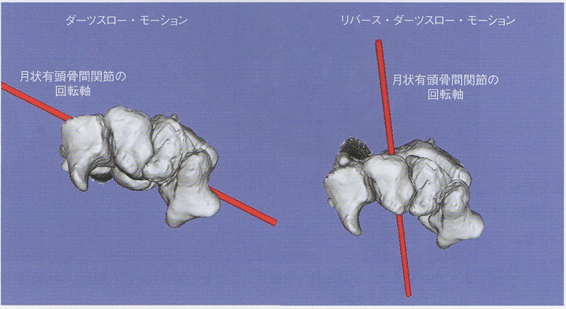
一方、手jtの掌背屈運動では、LT-CHjtは掌背屈方向に有頭骨中心に通る回転軸まわりに回転する。また、手jtがリバース・ダーツスロー・モーションで尺背側方向に動いたときは、LT-CHjtは尺屈方向に動く。

よって、S-TTCjtとは異なり、LT-CHjtは自由度が大きい二軸性の関節であるといえる。
舟状骨月状骨間jt
手根中央jtの基本運動は橈掌側から尺背側に向かって45°斜めに走る回転軸を長軸とする楕円球の運動であり、運動面はダーツスロー・モーション平面である。手jtの橈尺屈運動では、手根中央jtの舟状骨側であるS-TTCjtと、月状骨・三角骨側のLT-CHjtはともにダーツスロー・モーション方向に動く。しかし、手jtの掌背屈運動では、LT-CHjtは掌背屈方向に動く。つまり、S-TTCjtとLT-CHjtは橈尺屈運動では同じ方向に動いているが、ダーツスロー・モーション、掌背屈運動と運動方向が矢状面に近づくにつれ運動方向がずれてくる。また、手jtのリバース・ダーツスロー・モーション方向の運動においても、LT-CHjtは橈尺屈方向に動き、S-TTCjtと運動方向は異なる。
そのため、S-TTCjtとLT-CHjtの運動方向のずれと調整するために舟状月状骨間(SL)jtの動きが必要となる。SLjtは平面jtで、この平面に沿って舟状骨と月状骨は背側SL靱帯部を支点とした運動を行う。

また、SLjtの可動域はS-TTCjtとLT-CHjtの運動方向のずれが小さい橈尺屈運動では小さく、ずれが大きい掌背屈運動とリバース・ダーツスロー・モーションでは大きくなる。
リハビリテーションへの応用

ダーツスロー・モーションは、日常生活で最も用いられることの多い運動方向であり、ハンマーを使用するときや、コップを使用する。ボールを投げるなどの、特に道具を使用する動作で用いられる。また、橈骨遠位端骨折後では、手根中央jtの動きが制限され、ダーツスロー・モーションの可動域が減少するといわれている。そのため、橈骨遠位端骨折後、特に関節内骨折の術後早期などで橈骨手根jtをすぐに動かすことが困難な時でも、ダーツスロー・モーションであれば、骨折部にストレスをかけずに早期からリハビリテーションが可能であり、手根中央jtの拘縮の予防・改善、日常生活活動の能力の向上を図ることができる。
また、橈骨遠位端骨折後は橈骨手根jtが原因で関節拘縮が生じることが多い。リバース・ダーツスロー・モーションをリハビリテーションに応用することにより橈骨手根jtの可動域が改善するといわれている。よって、骨折部が安定した後は、橈骨手根jtの動きが要であるリバース・ダーツスロー・モーションを適用することにより、より効果的なリハビリテーションが実施できると考えられる。
引用・参考文献
安部幸雄編):橈骨遠位端骨折を極める 診療の実践A to Z、南江堂、2019年
青木隆明監)、林典雄執):運動療法のための機能解剖学的触診技術上肢、改訂第2版、MEDICAL VIEW、2012年
この記事が気に入ったらサポートをしてみませんか?