オランダ物質物理学研究所、センサーなしで環境を識別する柔らかいロボットハンドを開発

2024年2月5日、オランダ物質物理学研究所(AMOLF)の研究者らは、ソフトロボットが内蔵センサーなしで環境を識別する新たな手法を考案したと発表した。
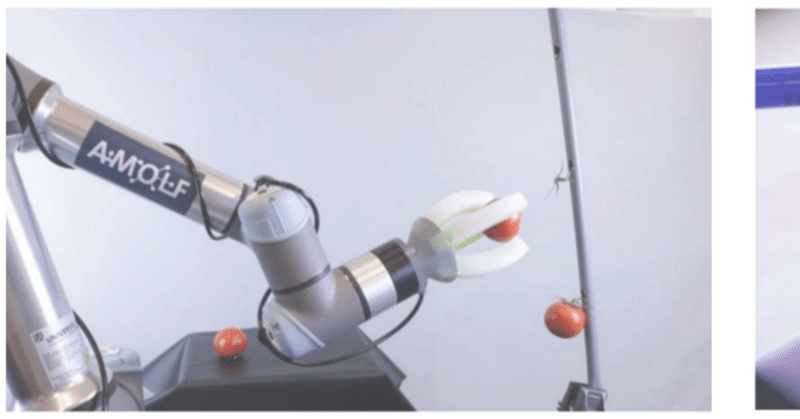
「Nature Communications」誌に掲載されたこの技術は、ロボットの指が及ぼす圧力を外部から測定するもので、硬い内蔵センサーは必要ない。風船のように膨らんだりしぼんだりするロボットの4本の指を操作するのに必要な空気圧を測定することで、システムは把持されている物体の特性を推測することができ、トマトの摘み取りから低侵襲医療処置で使用される吸引カップの制御まで、さまざまな場面でこのシステムの有用性を実証し、組織の損傷を最小限に抑えた。
蘭アイントホーフェン工科大学と共同で開発されたこのシステムは、様々なソフトロボットに適用可能な汎用性の高いソリューションで、将来的には、重量など測定可能なパラメーターの範囲を拡大することで、ソフトロボットの能力をさらに高めることができると期待されている。
出典:
2024年2月5日付 AMOLF Press Release(英語)
https://amolf.nl/news/soft-robot-fingers-carefully-squeeze-without-sensors
2024年1月15日発行 Nature Communications(英語)
https://www.nature.com/articles/s41467-023-44517-z
2024年2月13日付 TechXplore(英語)
https://techxplore.com/news/2024-02-soft-robot-fingers-sensors.html