ROS入門 (38) - MoveItによるmycobotの制御

「MoveIt」のPythonインターフェイスによる「mycobot」の制御方法をまとめました。
・Melodic
前回
1. mycobot
「mycobot」は、「Elephant Robotics」と「M5STACK」が共同で開発した、世界最小・最軽量の6軸協働ロボットアームです。
前回までpandaを使っていた部分を、mycobotに置き換えます。mycobotの設定に関しては、以下のリポジトリを使わせてもらいます。
2. mycobotのパッケージのインストール
mycobotのパッケージのインストール手順は、次のとおりです。
(1) 必要なパッケージのインストール。
$ sudo apt update
$ sudo apt install -y ros-melodic-moveit
$ sudo apt install -y ros-melodic-ros-control ros-melodic-ros-controllers
$ sudo apt install -y ros-melodic-gazebo-ros
$ sudo apt install -y ros-melodic-jsk-rviz-plugins(2) リポジトリのクローン。
$ cd ~/catkin_ws/src
$ git clone https://github.com/Tiryoh/mycobot_ros
$ git clone https://github.com/nisshan-x/mycobot_moveit(3) ワークスペースのビルド。
$ catkin build(4) ワークスペースのセットアップ。
$ source ~/catkin_ws/devel/setup.bash3. rvizの起動
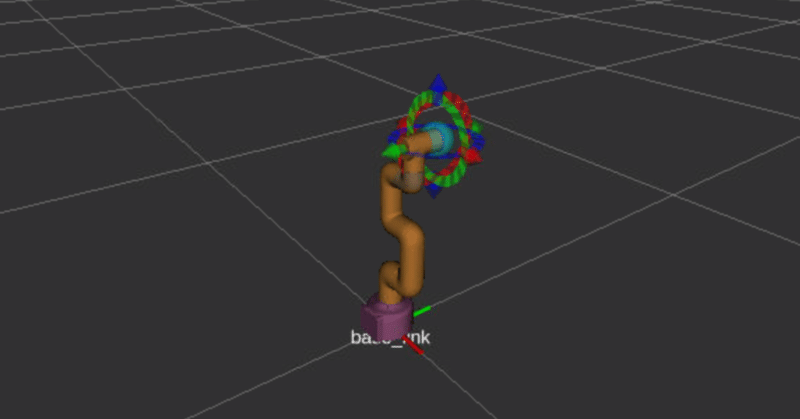
mycobotの動作確認のためrvizなどを起動します。
$ roslaunch mycobot_moveit mycobot_moveit_gazebo.launch
4. ロボット情報の出力
(1) 「hello_moveit.py」を以下のように編集。
変更は「panda_arm」を「mycobot_arm」に変更したのみです。
#!/usr/bin/env python
# coding: UTF-8
import sys
import moveit_commander
import rospy
def main():
# moveit_commanderの初期化
moveit_commander.roscpp_initialize(sys.argv)
# ノードの初期化
rospy.init_node('hello_moveit')
# RobotCommanderのインスタンス化
robot = moveit_commander.RobotCommander()
# MoveGroupCommanderのインスタンス化
move_group = moveit_commander.MoveGroupCommander("mycobot_arm")
# ロボットのプランニングフレーム名の取得
planning_frame = move_group.get_planning_frame()
print "planning_frame: %s" % planning_frame
# エンドエフェクタリンク名の取得
end_effector_link = move_group.get_end_effector_link()
print "end_effector_link: %s" % end_effector_link
# ロボット内のグループ名のリストの取得
group_names = robot.get_group_names()
print "group_names:", group_names
# ロボットの現在の状態の取得
current_state = robot.get_current_state()
print "\n", current_state
# ノード終了まで待機
rospy.spin()
if __name__ == "__main__":
main()
(2) 実行。
$ rosrun moveit_tutorials hello_moveit.py
[ INFO] [1639024560.065676700]: Loading robot model 'firefighter'...
[ INFO] [1639024560.067835000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1639024561.191953700]: Ready to take commands for planning group mycobot_arm.
planning_frame: base_link
end_effector_link: arm6_link
group_names: ['mycobot_arm']
[ WARN] [1639024562.204312400]: Joint values for monitored state are requested but the full state is not known
joint_state:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: "base_link"
name: [arm1_joint, arm2_joint, arm3_joint, arm4_joint, arm5_joint, arm6_joint]
position: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
velocity: []
effort: []
multi_dof_joint_state:
header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: "base_link"
joint_names: []
transforms: []
twist: []
wrench: []
attached_collision_objects: []
is_diff: False5. 関節角度によるモーションプランニングと動作
(1) 「hello_moveit.py」を以下のように編集。
関節数は6つになります。
#!/usr/bin/env python
# coding: UTF-8
import moveit_commander
import rospy
import sys
import numpy as np
from math import pi
def main():
# moveit_commanderの初期化
moveit_commander.roscpp_initialize(sys.argv)
# ノードの初期化
rospy.init_node('hello_moveit')
# MoveGroupCommanderのインスタンス化
move_group = moveit_commander.MoveGroupCommander("mycobot_arm")
# 現在の関節角度を取得
joint_goal = move_group.get_current_joint_values()
print "from:", np.rad2deg(joint_goal)
# 関節角度の指定
joint_goal[0] = -90 * pi / 180
joint_goal[1] = 0 * pi / 180
joint_goal[2] = 0
joint_goal[3] = 90 * pi / 180
joint_goal[4] = 0
joint_goal[5] = 0 * pi / 180
print "to:", np.rad2deg(joint_goal)
# 関節角度によるモーションプランニングと動作の実行
move_group.go(joint_goal, wait=True)
# 停止 (動きが残っていないことを保証)
move_group.stop()
if __name__ == "__main__":
main()(2) 実行。
$ rosrun moveit_tutorials hello_moveit.py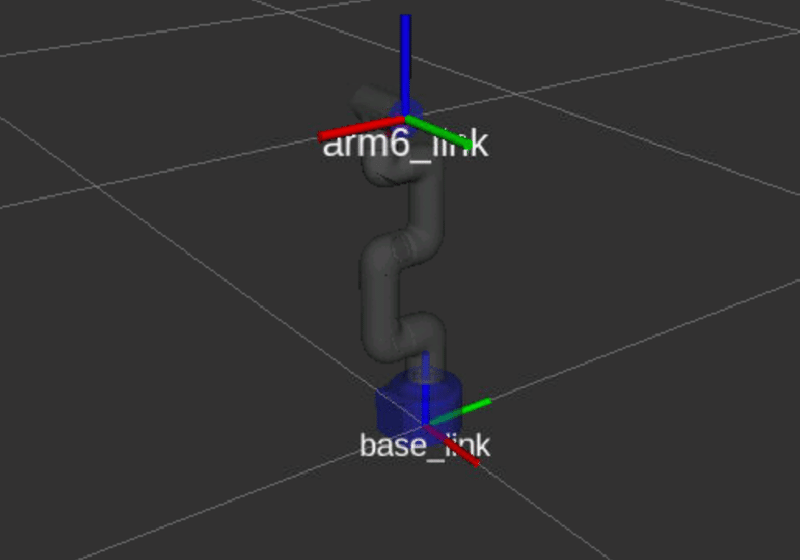
4. 姿勢によるモーションプランニングと動作
(1) 「hello_moveit.py」を以下のように編集。
#!/usr/bin/env python
# coding: UTF-8
import geometry_msgs.msg
import moveit_commander
import rospy
import sys
from math import pi
def main():
# moveit_commanderの初期化
moveit_commander.roscpp_initialize(sys.argv)
# ノードの初期化
rospy.init_node('hello_moveit')
# MoveGroupCommanderのインスタンス化
move_group = moveit_commander.MoveGroupCommander("mycobot_arm")
# 姿勢メッセージの生成
# pose_goal = geometry_msgs.msg.Pose()
# 現在の姿勢の取得
pose_goal = move_group.get_current_pose().pose
# 姿勢の指定
pose_goal.position.x += 0.0
pose_goal.position.y += 0.0
pose_goal.position.z -= 0.05
pose_goal.orientation.x += 0.0
pose_goal.orientation.y += 0.0
pose_goal.orientation.z += 0.0
pose_goal.orientation.w += 0.0
# 姿勢によるモーションプランニングと動作の実行
move_group.set_pose_target(pose_goal)
move_group.go(wait=True)
# 停止 (動きが残っていないことを保証)
move_group.stop()
# 姿勢目標のクリア
move_group.clear_pose_targets()
if __name__ == "__main__":
main()(2) 実行。
$ rosrun moveit_tutorials hello_moveit.py
5. 参考
次回
この記事が気に入ったらサポートをしてみませんか?