
2019/11/03 豊田スタジアムAIカーレース

ラグビーワールドカップの余韻冷めやらぬ豊田スタジアム。
「わくわくワールド 来て、見て、体験、ものづくり!」で「自動運転ミニカーバトル」が行われました。
応援するチームが参加するということで、観戦してきました。
超音波距離センサを多数積んだ、規定の台車にプログラミングをほどこしてレースを行うプログラミング部門と、一定以下のサイズに収めれば何でもありの無制限部門があり、DonkeyCarは無制限部門にエントリーしています。
雑感
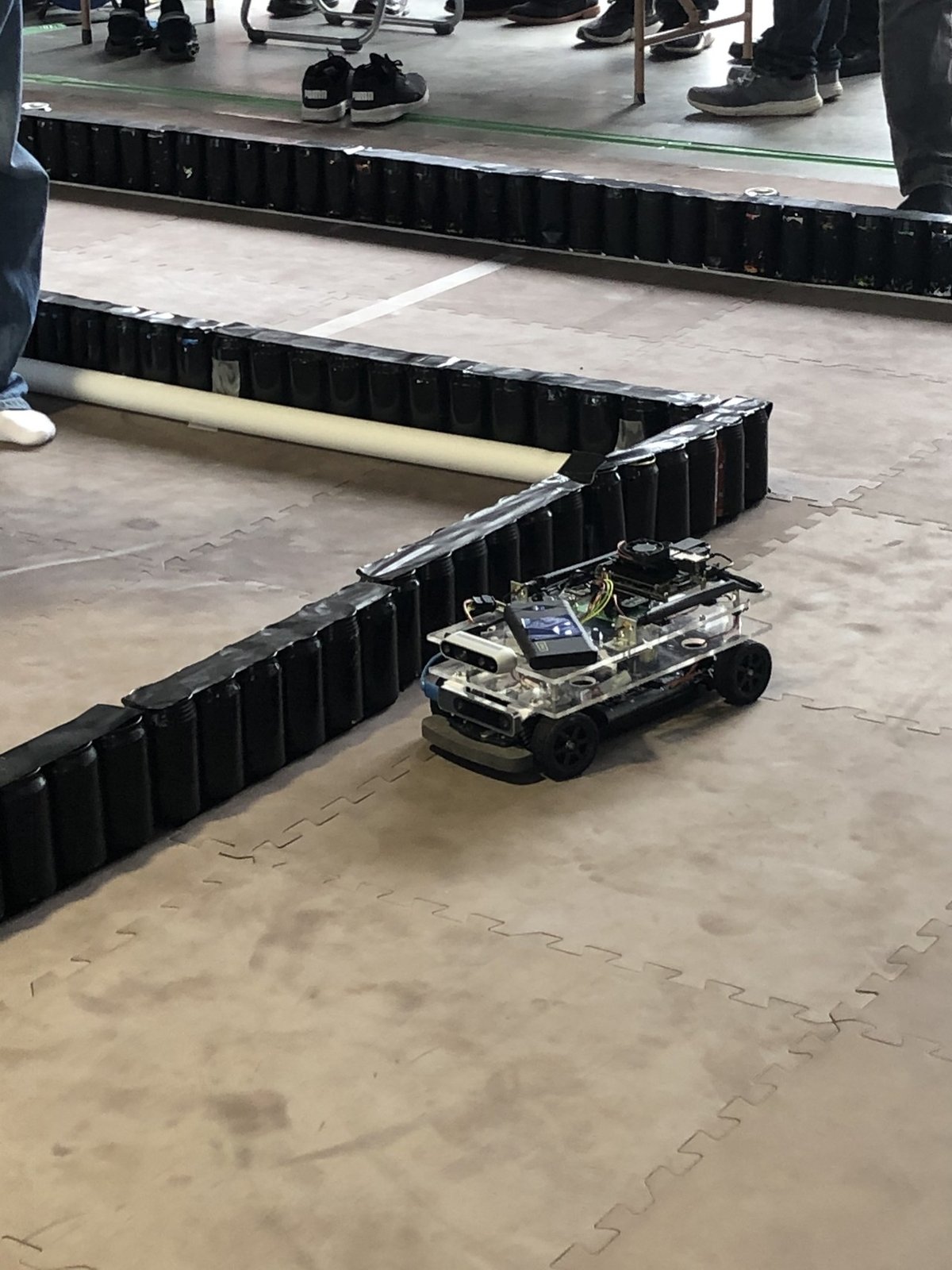
REALSENSEとJetsonNanoで重武装した車が予選落ちし、決勝に残った車はすべて軽装備だったこと。決勝トーナメントに残ったチームのうち、3台はDonkeyCarとDonkeyCar派生タイプだったのが印象的でした。
写真は優勝したDonkeyCar改造車。
私はCoralEdgeに最後まで気が付かなかった。

(訂正)決勝4台中3台がドンキーカーベースでした。
1.donkey car標準機+超音波+pi3B+CoralEdge
2.レゴ EV3 超音波+地磁気センサー
1/28 jetson nano使用のdonkey car
1/28 pi3Bのdonkey Car(M-DRIVE ハロウィンレーサー)
SLAMタイプは調整不足で不発。
来年には強敵に成長するかもしれない。

JetsonNanoのパワーでステレオカメラで距離を測定し、SLAMで走行する王道の制御。赤外線投射タイプのステレオカメラは近すぎると正しい距離を算出できないため、狭すぎる今回のコースは不利だったのかも。
ホビータイプの自動運転車は、まだ旧式のセンサータイプが有利と言える結果でした。
勝率の高いマシンはすべて距離センサを使用していた気がします。
コースが空き缶を並べて作った、超音波距離センサに有利な構成だったのも一因です。
(超音波センサを使ったプログラミング部門のレースと同じコースを無制限部門でも使用したため。)
Donkeyは通常は障害物なしで、コースアウトし放題のコースで走りますが、今回は両側を高い空き缶の壁で囲まれた通路を走ります。
障害物との距離が近すぎると距離を計測できないREALSENSE系のステレオカメラは圧倒的に不利な状況。逆にオープンすぎる場所でも、距離を測る対象物が少ないので、それはそれで、REALSENSEには苦しいところ。
ハロウィンレーサー健闘
無制限部門は出場チーム16チーム、A~Dの4ブロックに分かれて予選を行いました。2台の車で同時スタートし、早いほうが勝利し勝ち点3を獲得。負けても時間内に完走したら勝ち点1を得ることができます。
障害物に当たると当たった回数がカウントされ、完走後のラップタイムに加算されます。(一回5秒)
また、コースアウトしたり、障害物から抜け出れない場合は、その場で持ち上げて修正する救済策がありますが、持ち上げてから5秒間、審判の許可があるまで走行の再開ができません。
予選の模様
予選1回目の走行。なかなかきれいに走行しています。
司会進行を驚かせる速さで走行完了。
予選2回目の走行。この辺りから太陽を徐々に雲が覆い始めます。
それにともなって、障害物に当たる回数が増えていきます。
予選3回目の走行。ハロウィンレーサーは翼を外してからが本番。(謎)
決勝トーナメント
決勝トーナメント進出、準決勝。
このころにはだいぶ空が陰ってきました。
DonkeyCarはまともにカーブが曲がれない。
司会進行が、「安心、安全が大事です!」と叫ぶが、それどころではないっぽい。
こんな感じで、やはり太陽光の差し込むところでは、時間経過とともにDonkeyCarの精度が下がっていくのですが、距離センサと併用してそれをカバーしたのが、優勝チーム。
同じくDonkeyCarベースながら、障害物に当たりそうになると減速、後退して調整して進む。
壁との接触がほぼなしで勝ち進んで優勝しています。
DonkeyCar改造車の決勝トーナメント、準決勝。
ルールベースの障害物回避。
DonkeyCar改造車の決勝トーナメント、決勝。
非常に安定した走りで優勝。
しかも、障害物への接触なし。
というわけで、狭い日本の会場では、たとえフラットなコースでも、コースの外側はすぐに壁にぶつかってしまうので、障害物センサの設置は必須ですね。
強豪を退けて決勝トーナメントへの進出おめでとうございます。

この記事が気に入ったらサポートをしてみませんか?