プログラム製作時の楽屋裏 - ロボット制御のための逆運動学
今日はジェネラティブアートの話ではなく、Processing は数式の検証にも使える - という話をしたい。2 リンク機構のロボットの場合、余弦定理を用いて計算すると、位置を指定しただけで関節部分にあるサーボモータをどれだけ回転させれば良いのか、といったことが一意に得られる。
ちなみに 2 リンク機構のロボットというのは冒頭に掲載されているようなもので、脚部分が 2 つのリンク(棒 2 つで)構成されれいるものを指す。
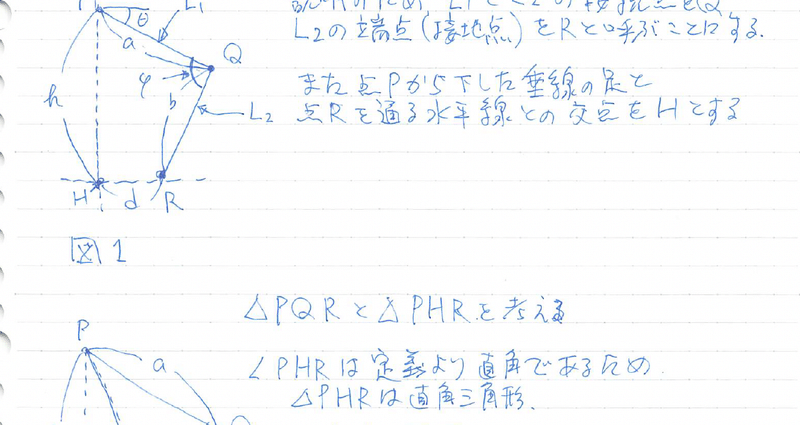
この導出はそれほど難しくはない。字が汚くて恐縮で