
【ミーア】梱包までの手順を一通りシミュレーションする

はじめに
前回、こちらの記事で100台届いた基板の不良品問題について記載した。
今回は上記不良品への対処法と、梱包までの手順のシミュレーションを行ったので、それについて記載。
本当は6/1にリリースしたかったのだが、諸事情(後述)あり6/8予定。
基板不良品に対しては、ディスプレイをやするで対応
現在、ミーアは、私とプロダクトデザイナーの稲田さんとソフトウェアエンジニアの3名で開発中。
ちなみに最初の100台の組み立てに関しては、手作業で自分達で行うことにした。コストカットと、自分達が全工程を把握していないと、次の量産の段階でも明確な指示が出せないので。
基板不良品に関して、自分の中では「これはどうしようもないなぁ」と諦めかけていたところ、稲田さんから
「LCDディスプレイの基盤をやすることで、ディスプレイ同士の干渉を防げるかもしれません」
と報告があり、実際に試すことに。
LCDディスプレイの側面を、ひたすら紙ヤスリと棒ヤスリで基板に嵌めたときに干渉しなくなるまで削っていく。
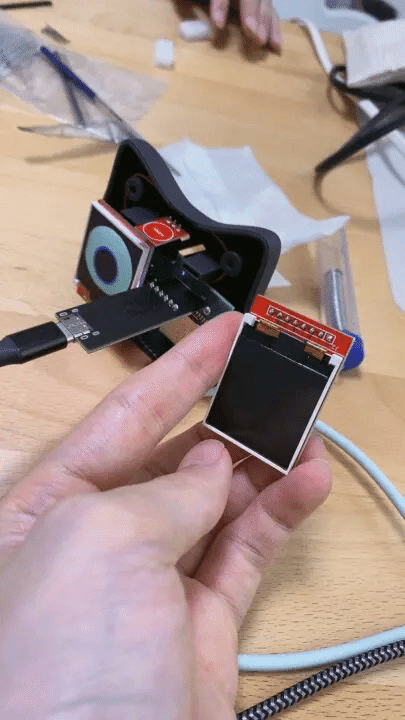

結構これが時間がかかり、正直「最初から届いた基板の取り付けピンヘッダーが水平だったら、この作業不要だったのに」と思いながらも、とりあえず10セット完成。

タッチセンサーをハンダして基板に取り付け
今回使用するTTP223タッチセンサーは、100個セットで届いているので1つずつに分解して、ピンヘッダーをハンダする必要がある。ひたすらハンダしていく。
また、デフォルトではタッチした時の感知としてLEDが光るようになっているのだが、そのまま取り付けると、LED赤光色が白筐体の場合に透過して光ってしまい、ロボット感が出るので、ニッパーでLEDの部分を切っていく。


ちなみにTTP223タッチセンサーはLEDを削除しても、タッチ検出は可能。その動作検証に関する記事はこちら
基板をねじ止めして固定
そして、スピーカーを背面に配置し、基板とタッチセンサーをその上に置いて、ねじ止めする。



これで、ミーアの背面半分が完成した。
アクリル板をはめて、ねじ止め
最後に、ミーアの正面を取り付ける必要がある。
しかし、ここでも問題が2点発生
1)アクリル板の到着が6/7,8前後と遅れることに
2)ミーア正面の3Dプリンターで中央部分が盛り上がっているものを発見
1はまぁ仕方がないとして、2は完全に、、、
続きは、こちらで記載しています。
よろしければサポートお願いします!いただいたサポートはクリエイターとしての活動費に使わせていただきます!