Ouster、SICK、VelodyneはLiDAR (Light Detection and Ranging) センサーを製造する主要企業です。NVIDIA IsaacはAIを活用したロボティクスプラットフォームで、これらのLiDARセンサーのシミュレーションを行います。

Ouster、SICK、VelodyneはLiDAR (Light Detection and Ranging) センサーを製造する主要企業です。LIDARは、自律型ロボットや車両のナビゲーションと環境認識に重要な役割を果たしています。
LiDARセンサーの主な特徴:
高精度な3D点群データを生成し、周囲環境の詳細なマッピングが可能
昼夜を問わず動作し、天候条件にも比較的強い
長距離の物体検出が可能
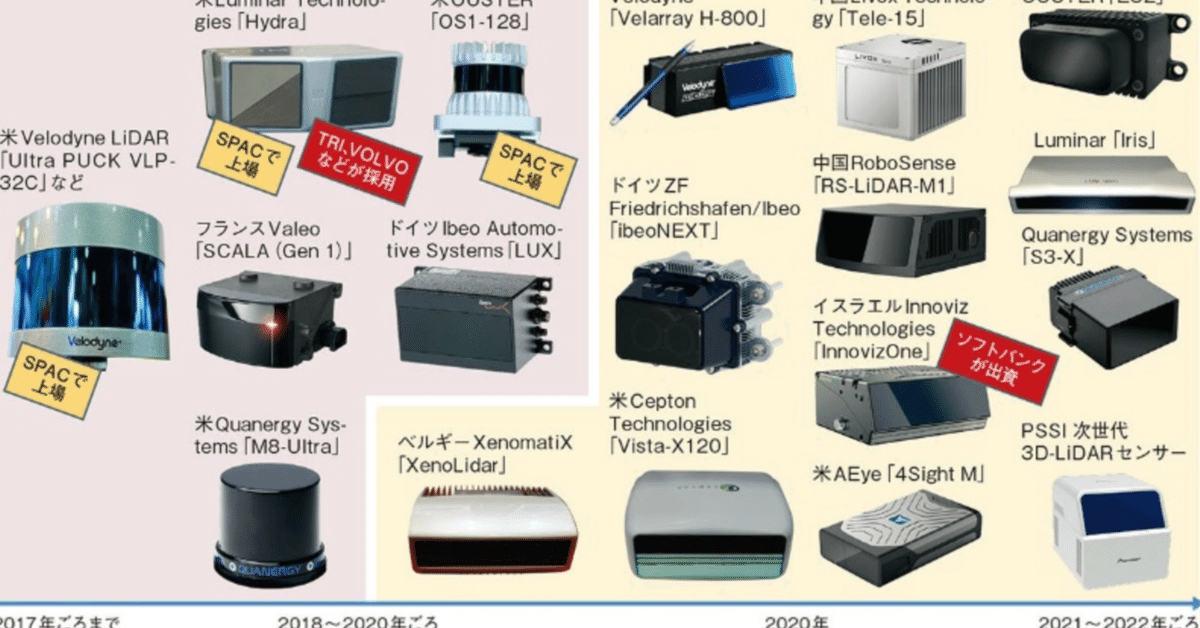
各社の特徴:
Velodyne: 自動車向けLiDARの先駆者で、高性能な360度スキャンLiDARを提供[2]
Ouster: 高解像度のデジタルLiDARセンサーを開発し、コンパクトで堅牢な設計が特徴
SICK: 産業用途に特化したLiDARセンサーを提供し、工場自動化や物流分野で強み
NVIDIAのIsaacとの関係:
NVIDIA IsaacはAIを活用したロボティクスプラットフォームで、これらのLiDARセンサーと密接に連携しています:
シミュレーション: Isaac Simを使用して、LiDARセンサーの動作をシミュレートし、ロボットの開発とテストを効率化
センサーデータ処理: IsaacプラットフォームはLiDARからの点群データを高速に処理し、環境認識や物体検出に活用
AI統合: LiDARデータとAIアルゴリズムを組み合わせて、高度な自律機能を実現
ハードウェア最適化: NVIDIA JetsonなどのAIコンピューターと組み合わせて、エッジでのリアルタイム処理を可能に
開発効率化: Isaac SDKを使用して、LiDARセンサーとロボットシステムの統合を簡素化
これらの連携により、NVIDIAのIsaacプラットフォームは、Ouster、SICK、VelodyneなどのLiDARセンサーの性能を最大限に引き出し、次世代の自律型ロボットや車両の開発を加速しています。
LiDARを使用した障害物回避のメカニズムとソフトウェアについて説明します。
メカニズム:
環境のスキャン: LiDARセンサーは、レーザー光を発射し、物体からの反射光を受信することで、周囲の環境を高精度にスキャンします。
距離測定: 発射したレーザー光が物体に反射して戻ってくるまでの時間(飛行時間)を計測し、物体までの距離を算出します。
点群データの生成: 多数のレーザー光を使用して環境をスキャンすることで、周囲の物体の位置や形状を表す3D点群データを生成します。
高解像度マッピング: 生成された点群データを用いて、ロボットや車両の周囲環境の詳細な3Dマップを作成します。
ソフトウェア:
データ取得: LiDARデバイスからデータを取得します。例えば、Webotsシミュレータでは`lidar.getRangeImage()`メソッドを使用します。
データ処理: 取得した距離データを処理して、障害物の位置、形状、サイズなどの情報を抽出します。
障害物検出: 処理されたデータを分析し、周囲の障害物を特定します。これには、クラスタリングアルゴリズムなどが使用されます。
移動障害物の追跡: 連続的なスキャンデータを比較することで、移動する障害物を識別し、その動きを予測します。
経路計画: 検出された障害物の情報を基に、安全な経路を計算します。これには、様々な経路計画アルゴリズムが使用されます。
制御命令の生成: 計画された経路に基づいて、ロボットや車両の動作を制御する命令を生成します。
リアルタイム処理: これらの処理をリアルタイムで繰り返し実行することで、動的な環境での継続的な障害物回避を実現します。
LiDARを使用した障害物回避システムは、高精度な環境認識と迅速なデータ処理を組み合わせることで、効果的に機能します。センチメートル単位の精度で障害物を検出し、高速に処理することで、動的な環境でもリアルタイムな対応が可能となります。これにより、自律移動ロボットや自動運転車両は、安全かつ効率的に障害物を回避しながら目的地に到達することができます。
この記事が気に入ったらサポートをしてみませんか?