
体幹の知覚を精密化する

体幹の姿勢制御システム
姿勢制御は複数の構成要素間の「システム」の産物である。Horakは「姿勢制御は単純な静的反射ではなく、むしろ複雑な技能としての動的な感覚運動過程の相互作用に基づいており、姿勢制御の機能的な目標は姿勢バランス(postural epuiqbrium)と姿勢の方向づけ(postural prientation)である」と述べている。これを体幹の姿勢制御に置き換えると、姿勢バランスは体幹の姿勢制御、姿勢の方向づけは体幹の運動制御というニュアンスになる。
姿勢バランス:体幹の姿勢制御
姿勢の方向づけ:体幹の運動制御
Horkは姿勢制御システムに必要な複数の構成要素として、次の6つが重要だとしている。
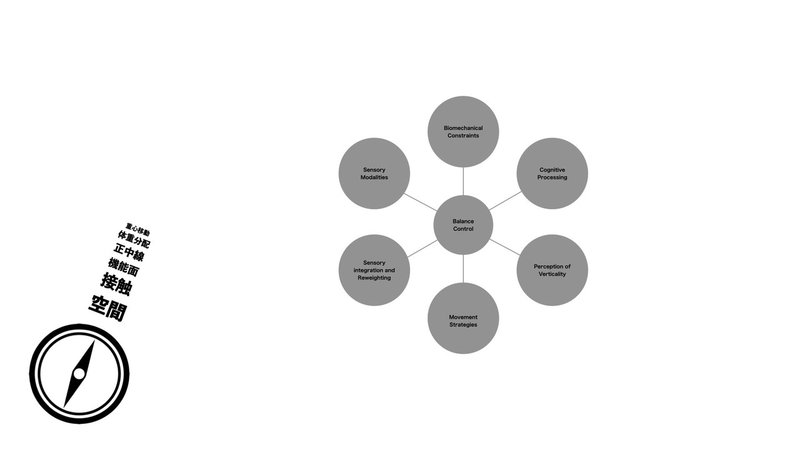
力学的制約(Biomechanical constraints):運動の自由度、筋力、安定性限界
認知過程(Cognitive processing):注意、学習
垂直性の知覚(perception of verticality):視覚的、姿勢的
運動ストラテージ(movement strategies):反応性、予測性、随意性
感覚統合(Sensory integration):感覚の優先度、感覚統合
感覚モダリティ(Sensory modalities):体性感覚、視覚、前庭覚
体幹の知覚の精密化、運動の細分化、上下肢との強調
体幹のパフォーマンス向上には3つの要素が存在する。
変容性(modification)
可変性(variability)
適応性(adaptation)
体幹の知覚を精密化する能力、体幹の運動を細分化する能力、体幹と上下肢を強調する能力である。
この3つはパフォーマンスを向上させるために必要な体幹の機能であり、脳の中の体幹である。
本稿では体幹の変容性について説明していく。
体幹の変容性
体幹の変容性とは「体幹の知覚を精密化する能力」である。それは「情報の受容表面としての体幹」における自己変容性であり、「体幹を介して空間的かつ接触的な知覚情報を精密化できること」を意味する。
「情報の需要表面としての体幹」は頭頂葉の体性感覚ニューロン・レベルでの自己変容能力(神経可塑性)を有しており、体幹の触覚、圧覚、運動覚、重量覚を介した知覚探索能力によって「空間測定器(コンパス)」としての役割を発揮することができる。つまり、体幹には次のような知覚情報を精密化する能力がある。
体幹の空間(方向、距離、形)の知覚情報
体幹の接触(表面形状、硬さ、重さ)の知覚情報
体幹の機能面(接触面:funcional surface)の知覚情報
体幹の正中線の知覚情報
体幹の体重分配の知覚情報
体幹の重心移動の知覚情報
こうした体幹の知覚の緻密化は「体幹と環境(物体)の相互作用」に基づいており、次のような体性感覚モダリティ(種類)を介した相互作用がある。
体幹の空間とは何か。
ここから先は
5,099字
/
13画像
¥ 290
最後までお読み頂き有難う御座います。記事が参考になりましたら、サポートして頂けると嬉しいです。サポートしていただいた際は、コンテンツの充実のために大切に活用させて頂きます。