
(2023.04.06) 10Kリグプロジェクト

本家サイトをGoogle Chromeの自動翻訳機能で翻訳した文章です。
2023年4月6日の記事
当社の専門ハードウェア開発者の 1 人である Samuel Meirlaen は、DeoVR の「10K Rig」プロジェクトを担当しています。彼はこの集中的なプロジェクトに数か月間取り組んできました。以下で、これまでの進捗状況の詳細な最新情報を読むことができます。ディスカッションに参加するには、Samuel に直接返信できる フレンドリーなフォーラムにアクセスしてください。

皆さん、こんにちは。お待たせいたしました。私の名前は、ハードウェア開発者の Samuel Meirlaen です。「10k リグ」プロジェクトの請負業者として、これまでの進捗状況の概要を喜んで共有させていただきます。
私たちの主な目的は、視点 (POV) 記録用に最適化された高性能 3D VR 立体カメラを作成することでした。当初の計画は、産業用センサーと市場で最高の魚眼光学系を組み合わせることでした。私たちは、概念実証プロトタイプとして Gpixel の GMAX0505 センサーを選択しました。解像度 5120x5120 ピクセル、最大フレーム レート 150 fps のこのセンサーは、完全に正方形のフォーム ファクターを備えているため、Sony Pregius S IMX530 よりも選ばれ、正距円筒魚眼録画に適しています。

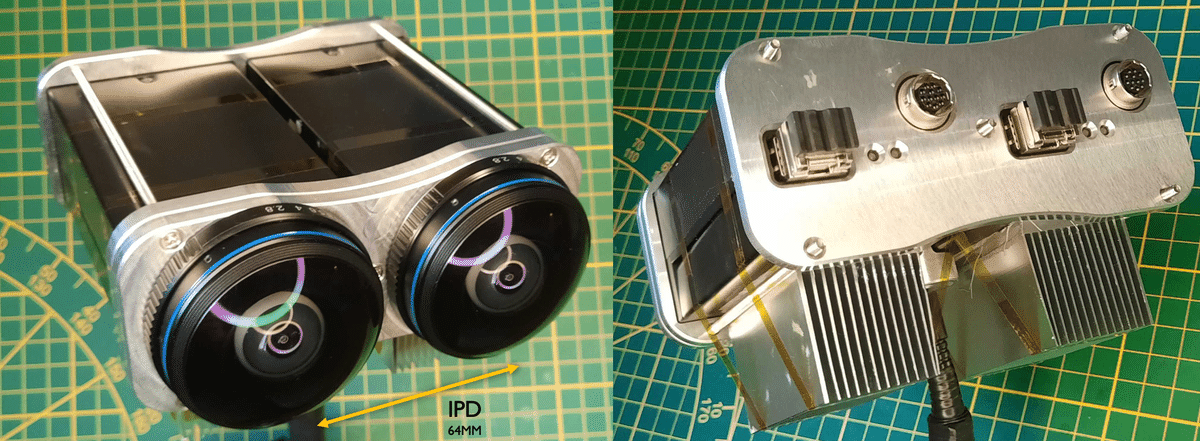
このセンサーは、このセンサーを参照番号 HB-25000-G のカメラ モジュールにパッケージ化しているカナダの会社 Emergent Vision Tech (EVT) から調達しました。このモジュールには、光ファイバーを介して参照番号付きのネットワーク インターフェイス カード (NIC) に変換する 25GigE SFP28 コネクタがあります。EVTのPH-25-DUAL。NIC は、PCIe Gen3 x8 インターフェイスを備えたサーバーに接続され、データを処理します。別途、カメラモジュールにも電源を供給する必要があります。当初から、このプロトタイプはスタンドアロンとして設計されたものではありませんでした。

光学系には、色収差を低減するように設計され、標準バージョンで MFT マウントを備えた Izugar MKX200 アポクロマート レンズを選択しました。

EVT カメラ モジュールには標準の C マウントがあるため、Gpixel センサー上に最大の焦点の合った画像インプリントを作成するために必要なフランジ焦点距離を考慮して、MKX200 レンズと C マウントを完全に接続する高精度 CNC 加工プレートを設計しました。表面。

これらのプレートは、両方のカメラ モジュールを互いに平行に保ち、光学間距離 64 mm を保ちます。

私が物理要素を製造している間、私たちは同僚と協力して、両方のセンサーからのデータを記録し、リアルタイムで保存できるサーバーの組み立てに取り組みました。EVT が提供する録画用のオリジナル ソフトウェアには、RAW Bayer8 または 10、Adobe DNG、または TIFF ファイル配列でのエクスポート オプションがあります。Bayer8 の 1 つのセンサーからの 1 つのフレームの重さは 26.2 MB であるため、75 fps で記録する両方のセンサーには、約 4 Gbps でデータを持続的に書き込む能力が必要でした。
当初、私たちは最高書き込み速度約 5000 Mbps と評価されている M.2 インターフェイスを備えた Samsung 980 Pro NVMe を検討しました。ただし、テスト中に、この速度を長期間維持できないことがわかり、システムが不安定になりました。最近、この書き込み速度を長期間維持できる 2 台の KIOXIA SSD ドライブ (参照 KCM61RUL7T68) を使用することにしました。
リグでいくつかの成功した記録の後、Gpixel Gmax0505 センサーの光感度に関する新たな問題に遭遇しました。Sony Pregius S IMX530 センサーのダイナミック レンジは 70 dB ですが、Gmax0505 は最大 60 dB までしか到達せず、大量の光補正を行ったとしても、この値は私たちの使用には低すぎることがわかります。
振り返ってみると、Sony IMX530 は、実効解像度がフレームあたり最大 4600x4600 ピクセル、つまり有用なコンテンツのフレームあたり 2116 万ピクセルに低下するとしても、色と光の感度の点でより良い選択だったでしょう。(これは依然として非常に高性能な VR カメラであることに同意します)
このプロジェクトの全過程を通じて、私は EVT のネイキッド カメラ モジュールを収容するための完全なカスタム エンクロージャを設計するというタスクに取り組みました。

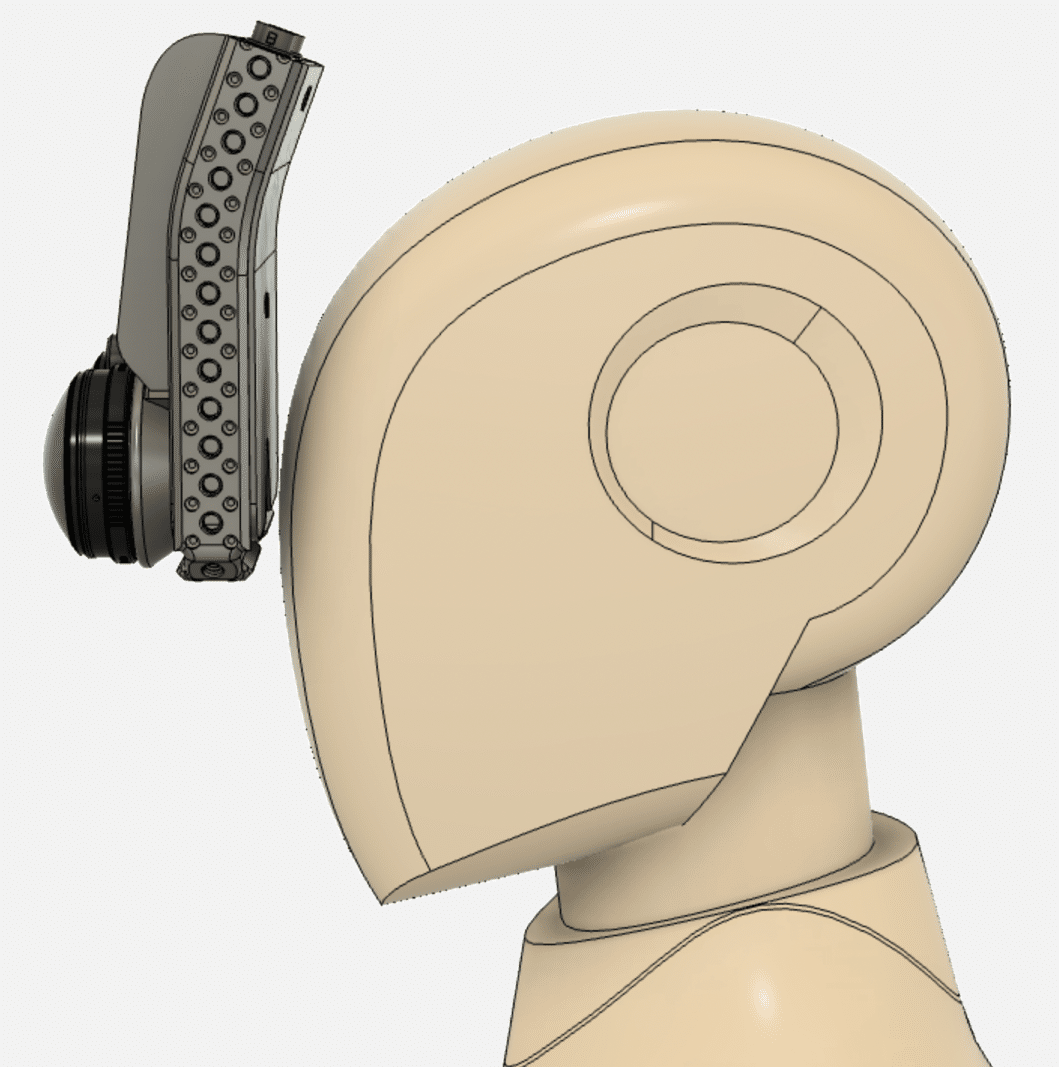
この筐体は美学を念頭に置いた設計ではなく、視点カメラとしての最適な機能を考慮して設計されており、ユーザーの視線の真上、額にできるだけ近い位置に配置されています。設計が熱放散のために最適化されていることを確認するために、大型の放熱器が組み込まれており、騒音の多いファンが不要になります。
さらに、この設計は、少なくともこの性能レベルでは、市場で入手可能な最も浅い VR カメラの 1 つを誇り、光学素子の上部とユーザーの額の間の距離はわずか 65 mm です。この配置により、VR 観客側で可能な限り最高の視点と固有受容が可能になります。

この設計は、重量と安定化の問題が発生するため、ユーザーの頭にストラップで固定することを目的としていません。代わりに、ユーザーがセット上で適切かつ安定した配置を確保できるように、設計には NATO グリップ、ショルダー リグ固定具、ジンバル固定具などの無数のオプションが含まれています。
カメラはまだ可動式ではありませんが、この 10kRig プロジェクトの将来の反復では、電源およびストレージ ソリューションを統合したカスタム PCB の完全な再設計が含まれ、プロトタイプがスタンドアロン デバイスになる可能性があります。ただし、このような高いパフォーマンス レベルでこれを達成するために伴う課題はまだわかっていません。このプロトタイプをスタンドアロン バージョンに変える方法に関する提案は歓迎され、高く評価されます。
ビデオ処理側では、このような高データ ストリームでの録画を管理するには、まったく新しいワークフローが必要でした。現在、最近の VR ヘッドセットで表示するには、全体の解像度を元の解像度の 80% にダウンサイズする必要があり、ほとんどの場合 60fps に制限されています。これらの制限にもかかわらず、この設計は将来性があり、非破壊的な後処理効果のための十分な余地を備えた最適な 3DVR 制作を可能にします。
このプロジェクトに関連する多くの課題は正常に解決されましたが、このカメラをすべての VR 制作スタジオで利用できるようにするには、いくつかの課題が残っています。私たちの進化の次の段階にご期待ください。また、これまでの進歩についてのご意見を共有してください。
私たちの多忙でフレンドリーなフォーラムのこの投稿を参照して、ディスカッションに参加したり、Samuel に直接話したりしてください。