
つくちゃれレポート

ご無沙汰しております。こにだえです。
これまでに何度か記事を書こうとしていたのですが、結局しっかりと書き終わることなく記事の下書きばかり溜めてしまい、ぐうたらしている間につくばチャレンジが終わってしまいました。 (怠惰)
とはいえ、流石につくばチャレンジに出場したのに何もしないのもよくないので、今回は参加した僕たちの、参加レポートを書いていこうと思います。少々長くなってしまいますが、お付き合いいただければ幸いです...
背景
僕たちはもともと種子島ロケットコンテストなどの大会に出場していて、宇宙系のものづくりサークル界隈でローバーの開発をしていました。
そんな僕らが今回つくばチャレンジに参加したのは、Cansatよりも大きく、複雑なシステムの探査機を作れるようになりたいという思いから、
ROSを扱えるようになる
より大きなハードウェアを作れるようになる
といった目標を、開発を通じて達成することが目的でした。
つくばチャレンジは大学の研究室や研究機関、企業などが参加する大会で、お互いに協力しあって移動ロボットの技術レベルを向上させることを目的としています。
僕たちのように研究室に所属せず、全て独学&自腹でロボットを作っている大学生の集まりが出場することはあまり無い大会ではありますが、できる限りの力を尽くし、なんとか出場にこぎつけました。
機体
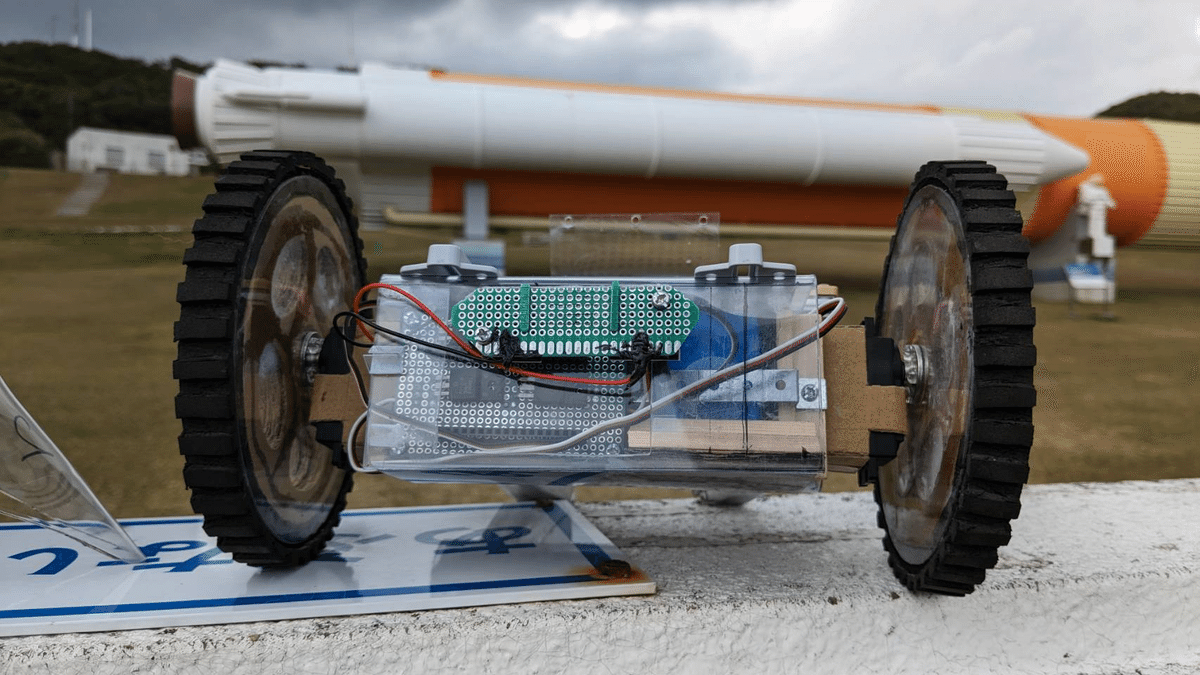
まずは僕たちが今回作成した機体をご覧いただきましょう。

なかなか手作り感満載ですね。この見た目のせいか、大会中は他の多くの参加者に二度見されました。
筐体の素材は主に木材とアルミパイプでできていて、車輪には子供用自転車の後輪を使っています。細かい部分は3Dプリンタで出力しました。動力は中華製の謎モータ(図面なし、消費電力以外の情報なし)を使い、スプロケットとチェーンを用いて駆動輪に力を伝達しています。
構造に関してはいろいろとツッコミどころも反省もありますので、今後別記事でまとめていこうと思います。
センサー系は、機体前方に2DLidar(最大計測距離12 m)が一つと、GPSとオドメトリー取得、あとはIMUの機能のためにスマホが1台載っています。
画像では撮り忘れてしまいましたが、電源にはマキタバッテリー(18V 3Ah)を使い、モータの制御にはESP32というマイコンを使っています。
制御と電装の反省についても、また別記事でまとめます。
製作体制・スケジュール
今回はメンバー4人で、そのうち3人が制御、2人が構造、1人が電装を担当しました。(足し算が合わないのは掛け持ちの発生によるものです。)
今回つくばチャレンジに参加すると決めたのは大体今年の4月なのですが、当初の予定としては夏休みに入るくらいにはROSやLinuxの勉強を済ませ、9月~10月頃にはロボットの完成。あとはひたすら実験走行とロボットの改良に充てるつもりでした。

しかし現実は厳しく、我らが理科大も牙を剥いてきました。その結果、尋常じゃない量の課題に加え、期末試験に対するプレッシャーを抱えることとなり、平日は大学、休日はほぼ全てロボット開発という日々を過ごすことになりました。それでも開発は遅れに遅れ、振り返ってみると下のようなスケジュールになっていたように思います。

特に最後の2週間はほぼ家に帰ることのない、作業所での泊まり込み作業が続くデスマーチでした。
とはいえ、大変さで言えば ロボット製作<<<大学であって、ロボット開発自体はそこまで大変ではなかったように思います(…多分)。今回のスケジュールが大いに狂った原因は、知識をつけるのに時間がかかったことと、大学が想定以上に大変だったことだと思います。
本番での様子
会場に着いた僕たちは、まずロボットの組み立てから始めました。メンバーには免許持ちが2人も居ますが、2人とも運転が下手過ぎて安全が確保出来ないという理由から、バラバラにして電車で運搬→会場にて組み立て。というロボットの運搬方法を取りました。不甲斐ない。

今回は本当にカツカツなスケジュールだったため、大会当日になって初めて安全審査を通すことになりました。

審査員の方々も小首をかしげるような機体ではありましたが、辛うじて審査を通過。とても安堵しました。
そして迎えた本走行。
出走が近づくと、出場チームはロボットと一緒に出走待ちの列に並びます。僕たちはこの時点からロボットを起動し、通信がしっかりできているか、きちんと自立走行のプログラムが動いているかなど、最終チェックをRvizの画面から行いました。

一応それっぽい挙動は示していたので、とにかく出走を待ちました。
走り出す直前には、大会の司会(?)を務めるアナウンサーにインタビューをされます。
アナウンサー「本日見たロボットの中で、一番手作り感のある機体ですね!」
僕ら「えへへぇ…(苦笑)」
そんなこんなで出走したわけですが、走行の様子はこんな感じでした。
アナウンサーの方に応援されつつ、スタート地点でまごまごする僕らのオヤニダエ。時おり思い立ったように走り出すも、すぐに僕らの方に帰ってきてしまう甘えん坊でした。
真面目な話をすれば、おそらく自己位置のロストか、これまでの試験走行では設置されていなかったスタートラインの旗を避けようとした結果、進めなくなっていたのではないかと思います。
旋回をしようにも車輪が空転してしまうなど、ハードウェアとしても大きな問題を抱えていたようです。
とはいえ、きちんとLidarのデータを使って障害物にぶつからないよう動ていることと、Rvizの画面から、ROSのNavigationスタックを使ったシステムを一通り動かせていることは確認できました。
完全に自力で作ったものがロボットとして動いた!ということが、僕たちにとって非常に嬉しいことでした。
知識も技術もお金も無い中、皆よくここまでやったなぁ。と、しみじみ感じます。
結果

今回の僕たちの記録はというと、
走行時間 2分
とのことです。正直スタート地点でまごついてただけで、記録というのもおこがましいですが、一応動いたぞ!と言えるような結果だったのではないでしょうか。
おわりに
今回は自分たちの技術力的にかなり背伸びをした挑戦として、つくばチャレンジに参加しました。当然のことながら、求められる力も参加者のレベルも、これまで参加してきた他の大会とは比べ物にならないほどに高かったです。また、はじめて取り組む事も多く、本番では自分たちの作ったロボットを単に”動かす”というだけで精一杯でした。
とはいえ、今回参加したことで、当初の目的だったROSを使った開発や、サイズの大きなハードウェアを作るといった経験をすることができました。何より、実際の街中での自律走行の難しさや、要求される技術レベルの高さを大会を通じて知ることができたのは、とても大きな事だと思います。つくばチャレンジは、本当に参加する価値のある大会でした。
今年の僕たちは、まだまだ未熟な部分の多いチームでした。ですが、いつかは完走するロボットを作れるほどに、技術力を高めることを目指して、これからもチャレンジしていきたいと思います!!

この記事が気に入ったらサポートをしてみませんか?