アクチュエータ制御#3 速度制御

電流制御系設計から時間を経てしまいました。今回はアクチュータの速度制御系を設計していこうと思います。アクチュエータと言っても今回はギアを考慮していないのでただのモータだけですけけど。
前回のおさらいは以下の制御帯域になるようにPIゲインを決定して電流応答のシミュレーションをしてみました。
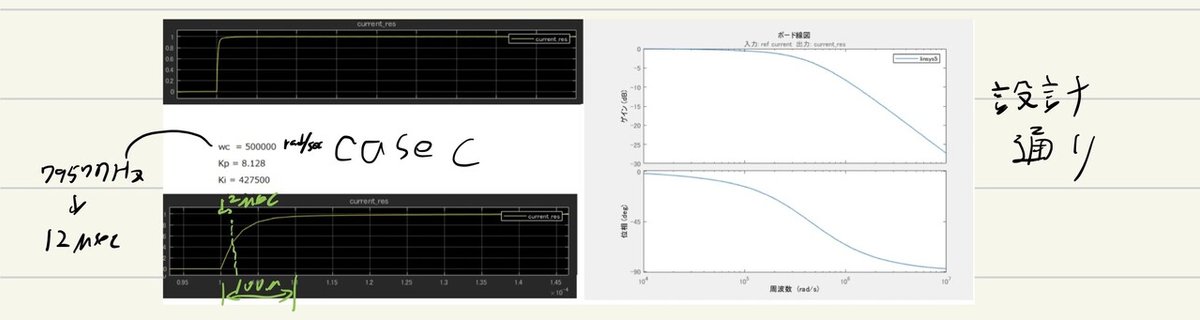
詳細はurlご参照
https://note.com/asahi4549/n/n2e4f18313308
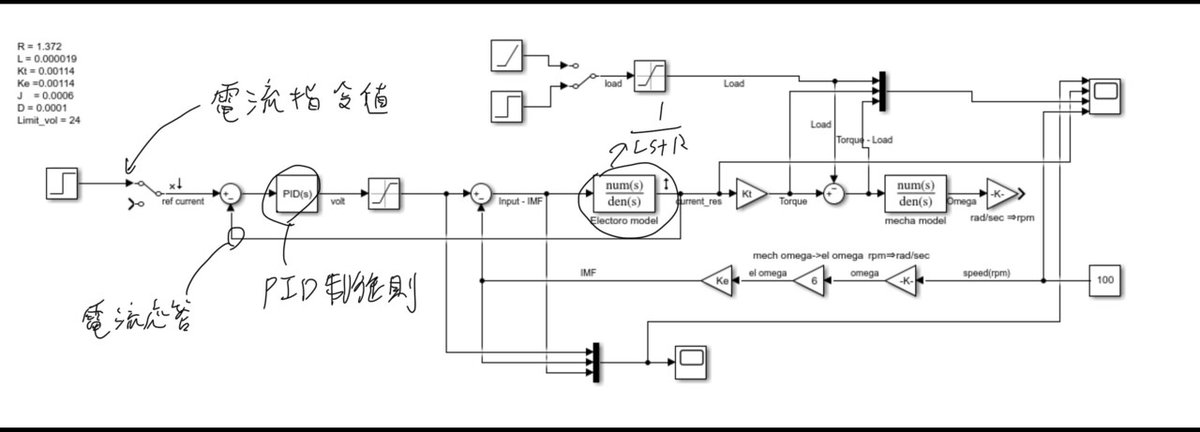
今回、速度制御するときのブロック図はこれ
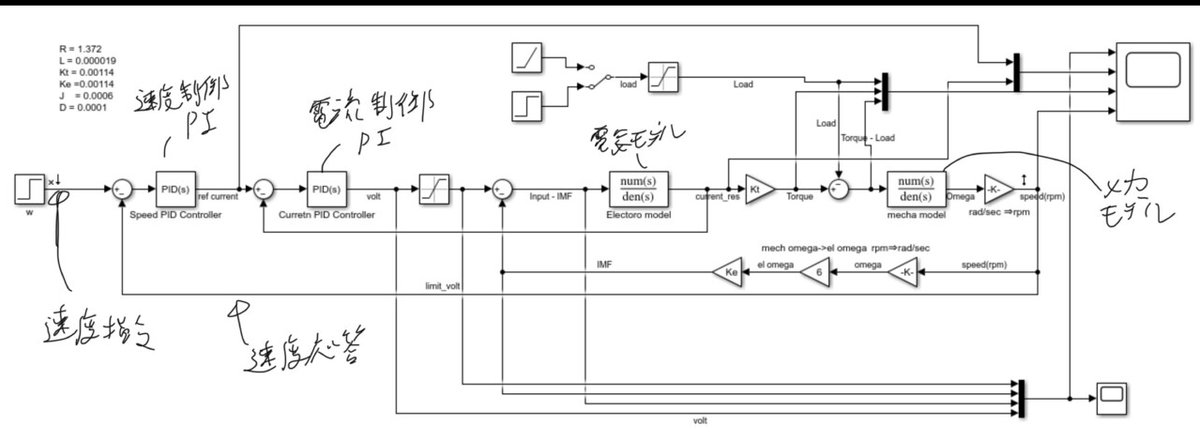
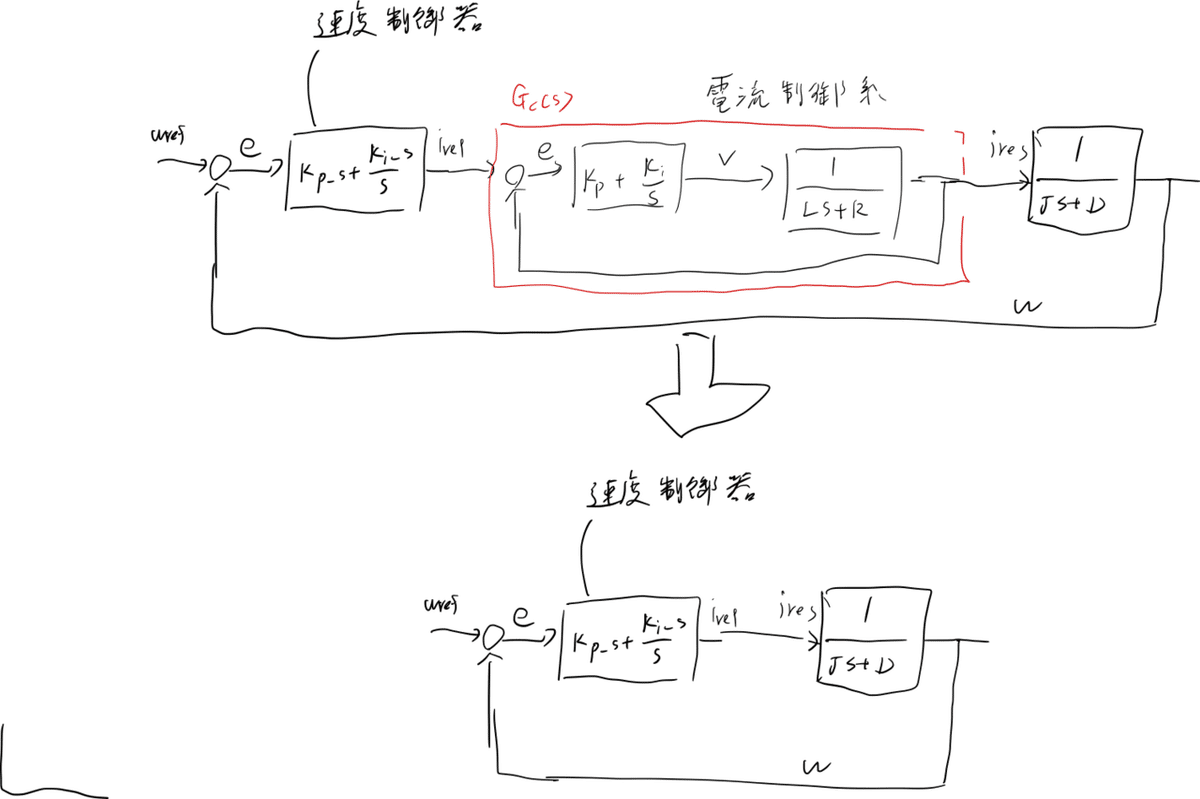
電流制御のPIDコントローラの外側に速度制御用のPIDコントーラを置いてその入力を速度指令値としています。PI制御ゲインの決め方は電流制御系の時と一緒です。Dゲインに関しては0で行きます。一点補足したいのが速度制御系を設計する時は速度制御器から見ると制御対象は電流制御用PIDコントローラ、電気モデル、機械モデルのフィードバック系となるので、電流制御系設計のように制御対象が1次遅れ系ではないということに注意して頂きたい。いや注意していただきたいって言われてもどうすれば良いと思うかもですけど、それを知った上で速度制御系を作ってねというお話です。よく言われているのは今回設計した電流制御系は応答を速くしているので電流指令値から電流応答の遅れはほぼないと仮定しようという考え方です。具体的に図に示すとこんな感じ。
それでは速度制御のPIゲインを求めてみよう。まず速度制御の制御帯域(カットオフ周波数)を最初に求める訳だがこれは電流制御の制御帯域の1/5以下にすると良いとされている理由は速度の応答よりも電流の応答の方が早いので電流の方を素早く制御したほうがそれより遅い速度を制御できるからである。なぜ1/5かというとそれはおそらくこれまでの先人たちの経験則から来ていると思われる。
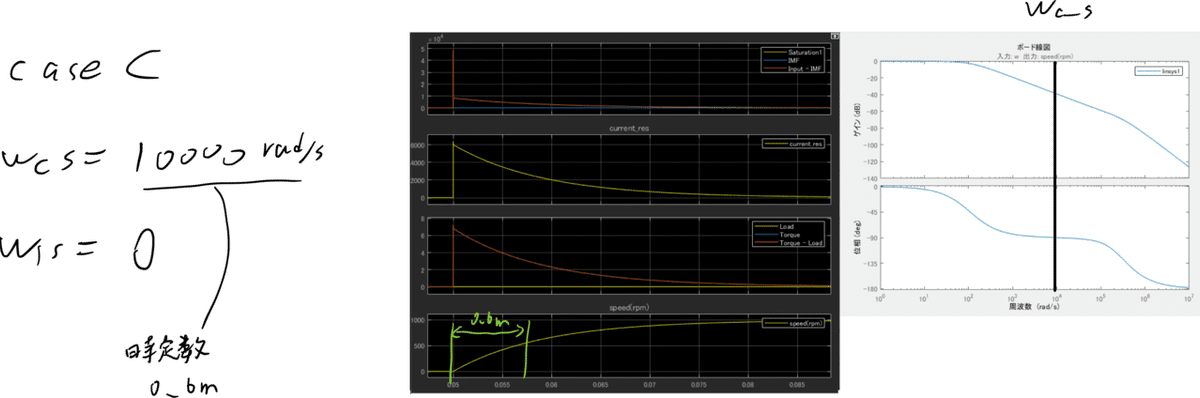
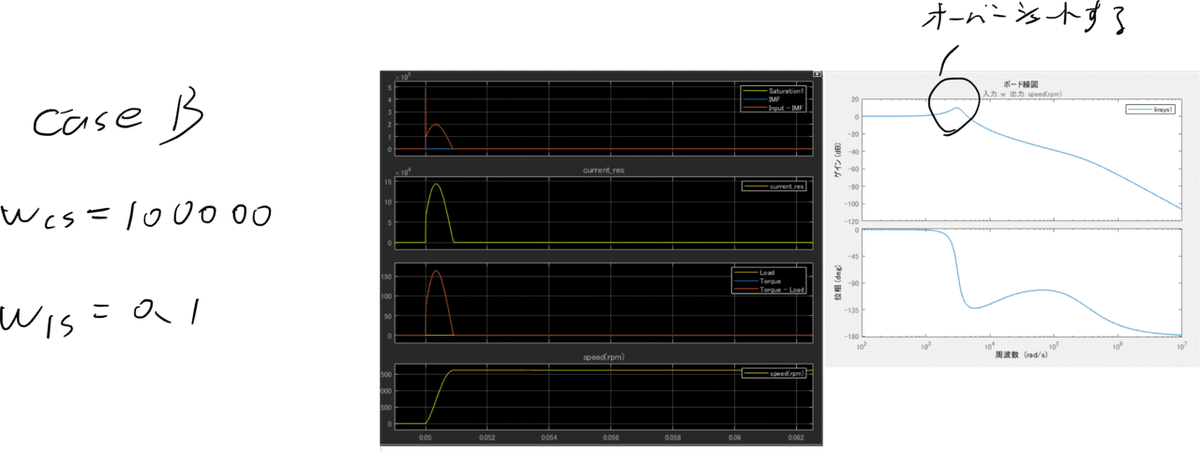
速度制御の制御帯域を以下の3条件で決めてみました。
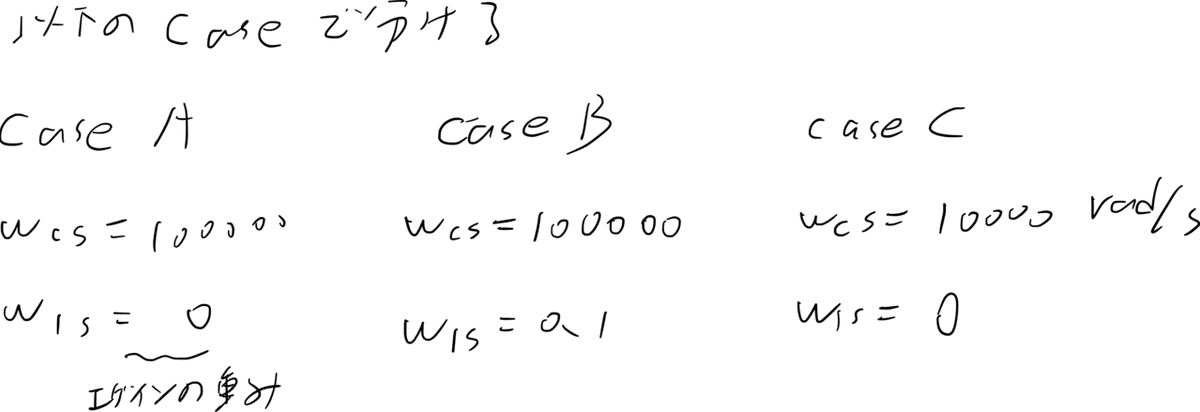
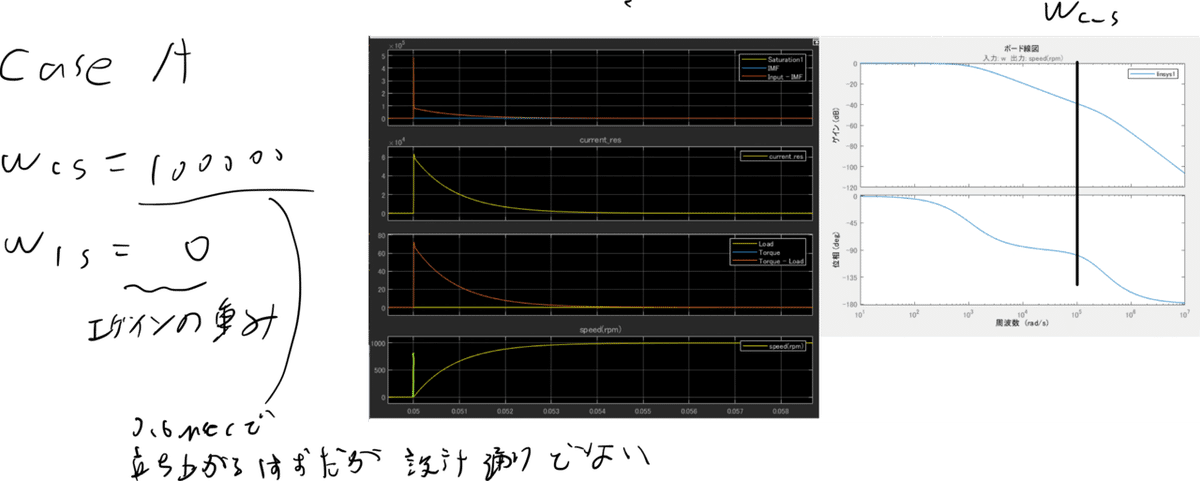
それぞれの結果は以下でした。なんと思ってた通りの速度応答になっていないですね。例えばcaseAでは速度の立ち上がり時間が0.6usecくらいになるようにしたのですが、実際は100usecもかかっていますね。他のcaseも同様でした。今回は電流系を1に近似して無理やり1次遅れ系と仮定しての設計でしたのでその仮定と実際のズレが影響している思います。もうちょっと先に進みたいのでこの考察の検証はまた別の機会ですることにします。次回は電流リミッタ電圧リミッタを入れるとどうなるか?です。これまでのはあくまで理論上の話で進めていました。実際モータ回すとかなったら1000A、10000Vとか無理な話ですからね。
.