グラフによるモーターの性能比較

トルク測定結果の活用
今回は、前回の記事で紹介した方法で測定したトルク値と、スマホアプリで計測した無負荷回転数を活用して、モーターの性能を比較する方法について書いていきます。
前回の記事はこちらです。
性能比較の例
グラフ上にモーターの性能直線を描いて性能比較をしてみます。
・(その1)回転数とトルクの双方に差があるパターン
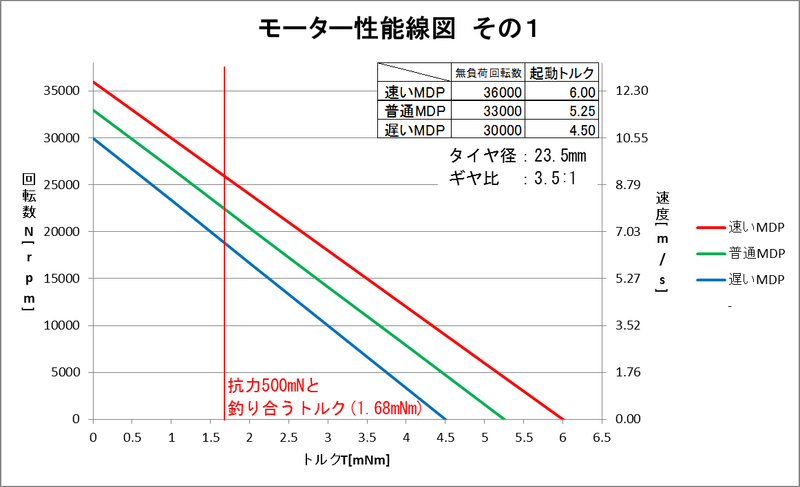
回転数とトルクの両方に性能差がある3つのMDP(マッハダッシュモーターPRO)があるとして、性能比較の例を紹介します。
グラフは、横軸がトルク、縦軸が回転数(速度)です。
モーター性能直線を描くには、まず、スマホアプリで無負荷回転数を測定、前回紹介した方法で起動トルクを測定します。そして、横軸上の起動トルク値と縦軸上の無負荷回転数の値を直線で結ぶと、そのモーターの性能直線を描くことができます。この比較では、速い、普通、遅い、の3つのモーターで、速いモーターほど回転数とトルクが両方とも高いものを想定しました。
赤い縦線は走行時の抵抗力と釣り合うモータートルク値を示しており、この赤縦線とモーター性能直線が交差する点での回転数が、最高速度で走行しているときのモーター回転数となります。
ここでは、タイヤ径23.5㎜、ギヤ比3.5:1、直線走行時の抵抗力を500mN(自分の経験則の数値で車体重量の1/3くらい)と想定しており、トルク値は1.68mN·mとなります。
赤縦線とモーター性能直線が交差する位置が上であるほど回転数が高い、つまり最高速度が速いということになります。右側の縦軸は、タイヤ径23.5㎜とギヤ比3.5:1を元に回転数を走行速度に換算した目盛りです。
また、走行に必要なモータートルク値が赤縦線のラインより小さくなることはほとんど無いと言って差し支えありません。ここでは抵抗力として直線走行時の抵抗力を想定しており、直線走行時よりも抵抗力が低くなるセクションとしては下り坂の直線などがありますが、そういったセクションの採用自体ないレイアウトが多く、あっても大して距離が長くないからです。
つまり、モーターが動作するのは赤縦線ラインよりトルクが大きい領域だけということになります。これより低いトルク値の時にどんなに回転数が高くてもほとんど無意味で、赤縦線より高いトルク値のときにどれだけ高い回転数を発揮できるかが重要になります。
さて、改めて図を見てみます。
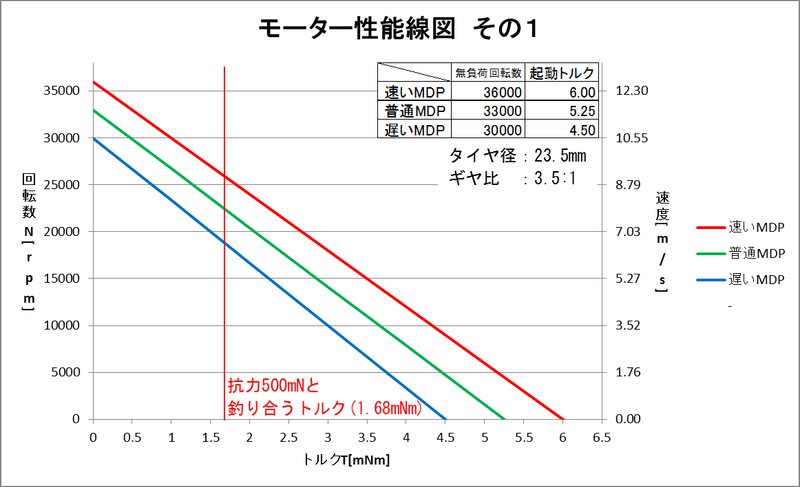
まず、赤縦線と各モーター性能直線の交差する点を見てみます。トルクと回転数で勝るモーターが最も回転数(=速度)が高いことがわかります。
次に、同じ回転数(=同じ速度)のときのトルクを比べてみます。例として回転数10000rpmの時のトルク値を見てみると、速いMDPは約4.4、遅いMDPは約2.9と、同じ速度でもトルク値に大きな差があることがわかります。つまり、その速度で走行しているときの加速力に差があるということです。
総じて、モーター性能直線が右上側に位置しているほど最高速度も加速力もよく、性能が上であるといえます。
この想定では、当然といえば当然ですが、回転数とトルクが高いと想定したモーターが最も性能が高いことが分かります。
・(その2)起動トルクは同一で回転数に差があるパターン
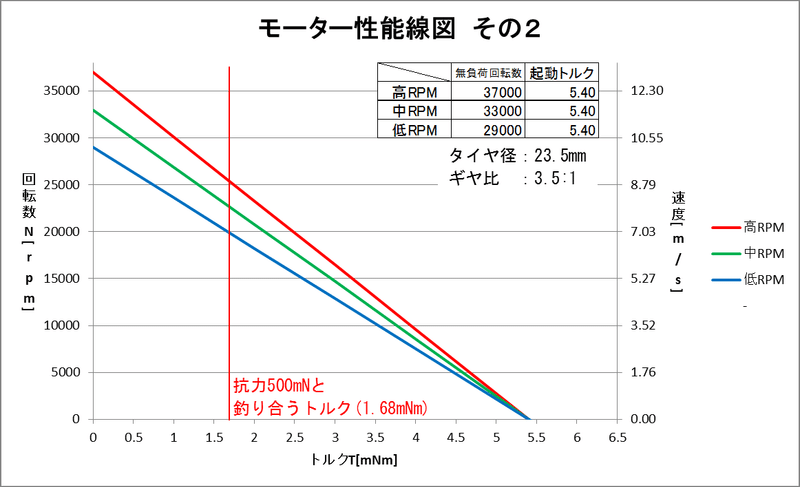
次は、起動トルクは全て同一ながら回転数に差がある3つのモーターを比較してみます。
赤縦線とモーター性能直線の交差する点を比較すると、当然ですが、回転数が高いモーターほど最高速度が速いです。また、同じ回転数なら、無負荷回転数が高いモーターほど発揮できるトルクが強く、加速性能も良いことがわかります。
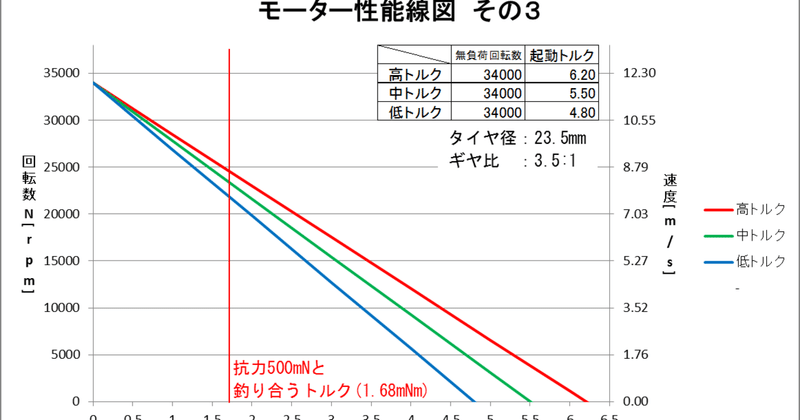
・(その3) 無負荷回転数は同一で起動トルクに差があるパターン
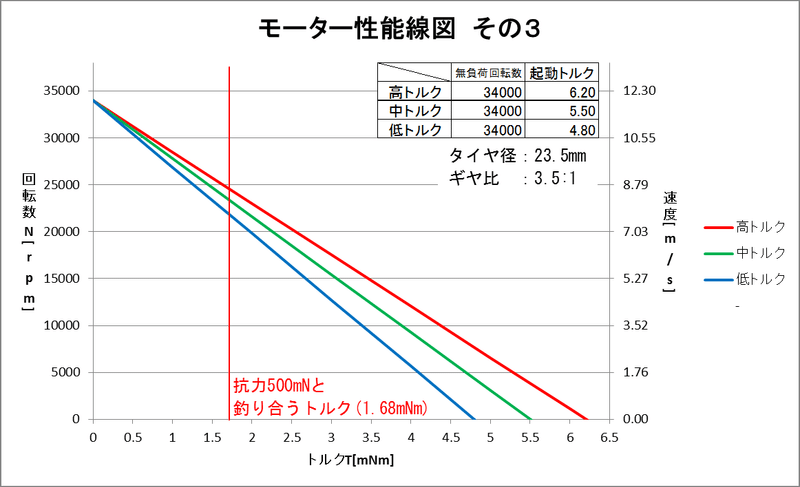
次は、無負荷回転数は全て同一ながらトルクに差がある3つのモーターを比較してみます。
赤縦線とモーター性能直線が交差する点を見比べると、高トルクのモーターほど最高速度が速いことがわかります。無負荷回転数が同じでも、トルクの差で最高速度が変わってくるということです。
また、当たり前ですが、同じ回転数なら高トルクのモーターほど発揮できるトルクが強く、加速性能が良いことがわかります。
・(その4) 回転数特化型とトルク特化型とその中間のパターン
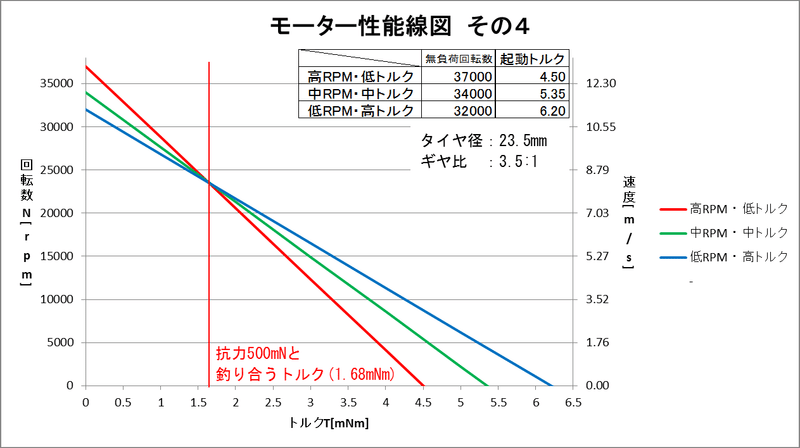
次は、回転数特化型(高回転だが低トルク)、トルク特化型(低回転だが高トルク)、その中間(中回転で中トルク)という3つを比べてみます。
今度は、全てのモーター性能直線がほぼ同じ位置で赤縦線と交差しています。つまり、無負荷回転数やトルクはバラバラであるものの、最高速度は偶然にも同じだということです。
そして、走行時の抵抗力がこれ以上低くならず、赤縦線より右側の領域でしかモーターが動作しないことを考えると、回転数特化型よりもトルク特化型の方が、モーター性能直線が上に位置しているため、性能が高いということがわかります。回転数が37000rpmと極端に高くても、トルクが低ければ、回転数32000rpmと一見平凡な数値のモーターに負けることもあり得るということです。これが、先ほど少し述べましたが、赤縦線より低いトルク値の時にどんなに回転数が高くてもほぼ意味がない、という現象です。
なお、この想定では回転数特化型よりトルク特化型が優れるという結果になりましたが、それはあくまで今回想定した数値がたまたまそういうものだったからです。多少トルクで負けていても回転数で大きな差があれば、総合力で優れていることも十分にあり得ます。ご承知おきください。
・(その5)自分の手持ちモーターの比較
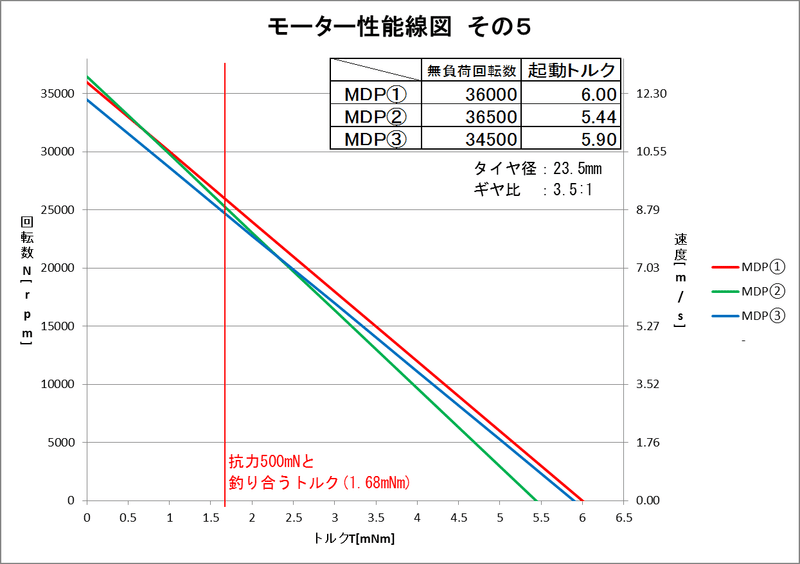
今度は、私の手持ちのモーターのうち3つを比較してみます。(極端な性能差がないので少しわかりにくく、申し訳ないです。)
無負荷回転数については、その差は小さいものの①<②です。しかし、赤縦線と交差する点の位置を見比べると、無負荷回転数の低い①の方が、②よりも最高速度が高いことがわかります。これは、①の方がトルクが高いために起こる現象です。赤縦線よりも右の領域で②の直線が①より上に来ることはないので、①はトルクのみならず速度でも完全に②より優れており、総合的な性能は①が上と言えます。
③は、①と比べるとトルクと回転数が両方とも劣っています。一方、②と比べると、最高速度こそやや劣るものの、回転数約22000rpm(トルク約2.3mN·m)の位置で性能直線が交差しており、これより速度が遅い(すなわち回転数が低い)領域では、③の直線の方が上に来ているため、同速度なら高いトルクを発揮できることがわかります。低速時の加速力は③が上回ると言えそうです。
総合すると、
・①は回転数もトルクも兼ね備えていて、この中では最も強い出力を発揮できる。
・②は回転数は高いがトルクが低いので、速度は伸びるが加速や登坂には弱い。その代わり①より暴れにくく、コースアウトの危険は少なそう。
・③は①より回転数とトルクの両方とも性能控えめで、パワソ調整(パワーダウン)に使える。また、最高速度を抑えつつもトルクは強めなので、コーナーや登り坂の多いレイアウトには②よりも向いている。
…ということが、「実際に走行させることなしに」判断できます。
実際に活用してみる。
いちいちパソコンでエクセルを使うよりも、案外、グラフを手書きした方がラクだったりします。
ということで、こんな用紙を作りました。(jpg画像は線が潰れているので、この図はイメージ画像としてご覧ください。)
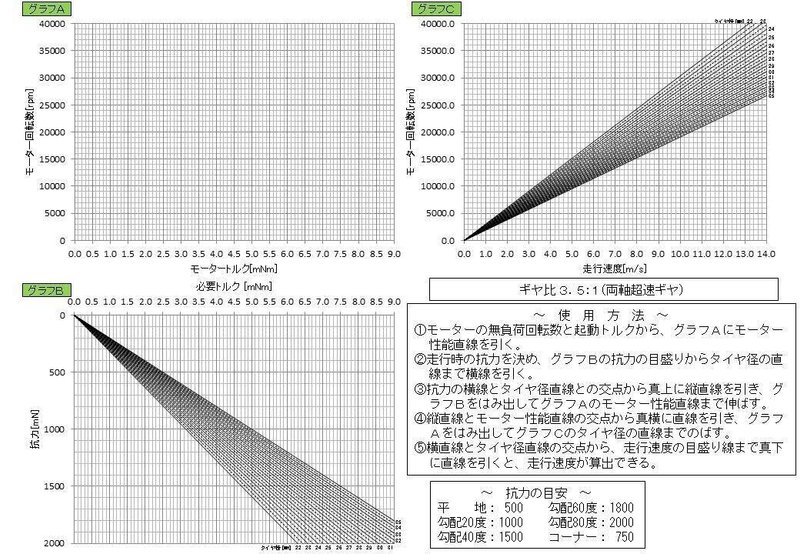
これは、モーターの無負荷回転数と起動トルク値を元に、ギヤ比、タイヤ径、走行時の抗力から走行速度を算出できるシートです。
航空機の分野で、離陸距離などを、積荷の重さや気温などの諸条件を加味した上で算出するのに使われるグラフを参考に作成してみました。
使い方は次のとおり。
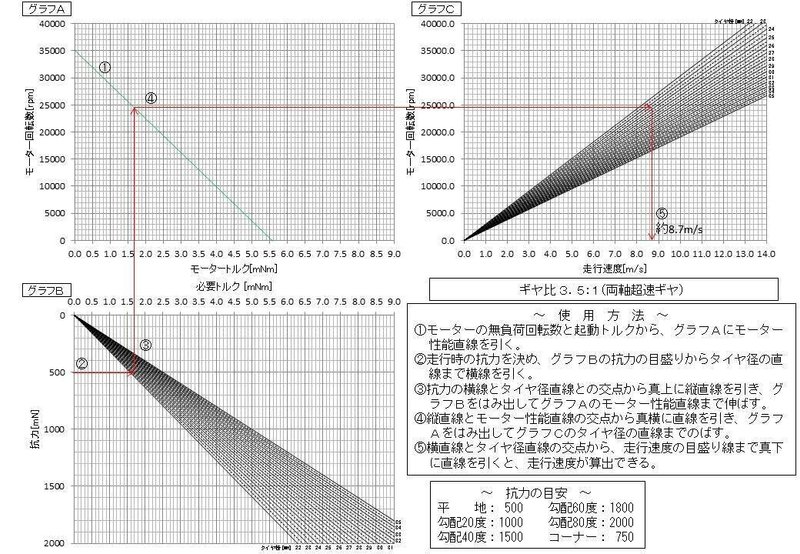
①左上のグラフに無負荷回転数と起動トルクからモーター性能直線を引きます。
②走行時の抵抗力(想定値)を決め、左下のグラフの縦軸目盛りから、自分のミニ四駆のタイヤ径の斜め直線に当たるまで水平に直線を引きます。抗力は、私の経験則から目安となる数値をシート右下に記載しました。タイヤ径の斜め直線は22.0㎜から35.0㎜まであり、実線と実線の間にある点線は0.5㎜の間隔で引いています。
③抗力の値から引いた水平の線とタイヤ径の斜め直線の交点から、真上に向かって縦の直線を引きます。この縦の直線が横軸に当たったところの数値が、走行時の抵抗力と釣り合うモータートルク値となります。この直線を上に伸ばし、左下のグラフからはみ出させて、上のグラフの①で引いたモーター性能直線に当たるまで伸ばします。
④左下のグラフから伸ばした縦の直線とモーター性能直線の交点から、右に向かって水平に直線を引きます。その直線は左上のグラフからはみ出させて右のグラフまで延長し、所望のタイヤ径の斜め直線に当たったら、今度は下に向かって縦に直線を伸ばします。
⑤縦に伸ばした直線が右上グラフ横軸に当たったところの数値が走行速度となります。
上に貼り付けた画像は画質が荒くて細かい線がつぶれてしまっているので、画質良好なPDFデータの活用をオススメします。ギヤ比ごとに3つのシートを作りました。
なお、このシートはすべて両軸シャーシのギヤ比で作っています。両軸と片軸ではカタログスペック上は同じギヤ比でも歯数の違いで正確なギヤ比が微妙に異なりますので、ご注意ください。
詳しくはこちらの過去記事にて。
要望があれば片軸用グラフシートも作るかもしれません。
おわりに
私はこの方法を考案する以前は、当たり前ですが、モーターの回転数と実際に走らせた感覚を参考にしてモーターの性能を比較していました。
しかし、持っている全てのモーターのトルク感を細かく記憶するのはさすがに無理でした。かと言って、走らせたときの感覚でトルクを記録しようにも、弱中強の3段階に分けるくらいがせいぜいで、例えば同じ「中」の範囲内でも差はあるはずで、正確な比較にはなりません。走らせてタイムが良かった順に並べたとしても、レイアウトによって適したモーター特性が異なるのですから、やはり正確な比較にはなりません。
モーターのトルクを測定して数値化し、グラフを使って性能を比較すれば、モーターの優劣が明確になりますし、高回転域と低回転域のどちらに向いているかなど個体ごとの得意分野も見えてきます。
回転数とトルクに違いがあるモーターを複数用意しておけば、「トルクそのままで回転数だけ下げる」とか「回転数は上げるけどトルクは下げる」など、パワーソースの絶妙な調整ができます。
この方法を取り入れてから、完走率とタイムの両立を1段階上のレベルに上げることができ、レースの成績が上がりました。
この手法が、もし何らかの参考となれば幸いです。
この記事が気に入ったらサポートをしてみませんか?