
ギュスターヴくんロボを作る

私はヒグチユウコさんの大ファンです。
彼女が描くキャラクターの、ダークファンタジーな世界観に魅力を感じているのですが、中でも私は「ギュスターヴくん」が大好きです。
リンク先のイラストと文面にもある通り、頭がネコ、腕がヘビ、脚がタコのキャラクターです。とんでもない組み合わせなのに、とてもかわいらしく感じられます。
先日、渋谷にあるヒグチユウコさんのギャラリーショップ「ボリス雑貨店」を訪れた際、置いてある様々なグッズに魅了されました。そういったグッズを眺めている時、ふと「動くギュスターヴくんがあれば良いのに」と感じました。いつか発売されるかもしれませんが、なければ作ればよいがモットーの私は、動くギュスターヴくん→「ギュスターヴくんロボ」を自作することにしました。
ロボを魔改造
いちから自作しようかと思いましたが、なかなか大変です。そこで、既製品を魔改造して、ギュスターヴくんロボにできないかと考えました。ギュスターヴくんの特徴である「タコ足」をヒントに、エレキットの6足歩行ロボ「フォロ」を活用できないかと考えました。l
しかしフォロは全身が黄色く、ギュスターヴくんのデザインに合わせるには、黒く塗装する必要があります。塗装もなかなか大変です。そんな中、おあつらえ向きの製品を発見しました。「フォロ ダークエディション」です。その名の通り、真っ黒なデザインのフォロです。これをギュスターヴくんロボのベースにすることを決めました。
フォロを組み立てる
フォロは、Amazonにて4400円で購入しました。製品名に「ロボット工作キット」と書いてある通り、完成品ではなく、プラモデルのように組み立ててから遊ぶ製品です。
フォロは対象年齢10歳以上、工作時間3時間程度、部品点数115点となっています。そこそこ組み立てがいがありそうなキットです。以前ロボット犬「Mini Pupper」を組み立て遊んだ時、3時間程度かかったことから、私の工作習熟度的にも、1時間程度でフォロは組立できるのではないかと見積もりました。
箱を開けてみると、プラモデルのようにランナー(パーツが付いた枠組み)で部品が入っていました。ニッパーで切り取る必要があります。工具は入っていませんので、ニッパーと締結用のプラスドライバーは自前で用意しなければいけません。また、単4電池4本も別売りです。

手順書が同梱されており、それに従い組立ていくのですが、とても分かりやすかったです。部品も配線やギアなどが役割に応じて色分けされており、組間違えがないような工夫が多く見られました。
組立は見積り通り、約1時間で完成しました。悩むところや失敗した点は特にありませんでしたが、子どもが組むには大人のサポートがあった方が良いくらいの難易度に感じました。

フォロで遊ぶ
せっかく組み立てたので、魔改造する前に遊んでみます。2つのモードが用意されていました。ものがあると近づきあとをついていく「なかよしモード」と障害物をよけながら進む「ぼうけんモード」です。


どちらのモードも、フォロの頭下部(内部の基板)についている赤外線センサーで障害物を検知して機能しています。
フォロを自由に動かす
これから魔改造するにあたり、フォロの頭をネコに変える必要があるわけですが、大きな問題があります。頭にある赤外線センサーが使えなくなるため、動かして遊べなくなってしまうことです。無理やり赤外線センサーを露出させても良いのですが、ギュスターヴくんの意匠性に大きく関わってくるため避けたいところです。
そこで、赤外線センサーに頼らず、自由自在にフォロを操作できるようにしたいと思います。難しく感じてしまうかもしれませんが、実は案外簡単に実現できます。
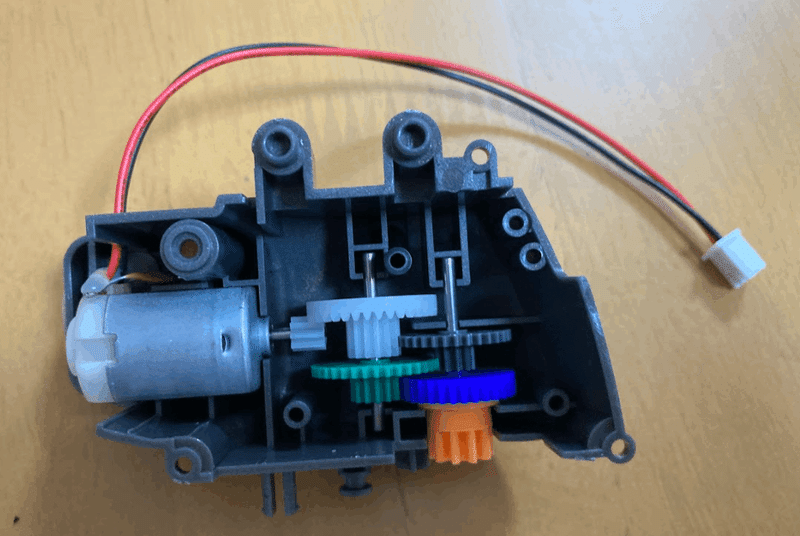
フォロはミニ四駆でも使われているDCモーター2個で前後左右に動いています。そのコントロールを付属の基板で行っているのですが、それを取り外し、代わりにM5Stampというマイコンボードと、モータドライバを付けてあげます。モーターや電池はコネクタ化(JST-XH)されているので、受けのコネクタも用意してあげる必要があります。

使用したM5StampボードのメインチップはESP32-PICO-D4が搭載されています。Wi-FiやBluetooth接続が簡単に行えるので便利です。私はスマホからフォロを操作できるようにプログラミングしました。ちなみに、数あるESP32やM5シリーズからM5Stampを選定したのは、ボードのサイズがとても小さかった為です。この後、頭にネコをかぶせる為、できるだけ内蔵部品を小さくする必要がありました。

悪魔合体
つい頭にばかり意識がいきがちですが、ギュスターヴくんは腕がヘビという特徴もあります。そこでまずは3Dプリンタでヘビを造形し、フォロの腕部品と交換しました。

いよいよネコの頭をくっつけます。ここはぬいぐるみを使用しましたが、選定に苦労しました。できるだけギュスターヴくんの色合い、模様に近いネコにすること。フォロのサイズ感に合うことが条件です。

そして、ついにフォロと合体し、ギュスターヴくんロボの完成です。細かいところですが、襟やツノ?も3Dプリンタで造形して付けてあげました。

動くぞ!ギュスターヴくんロボ
ついに完成したギュスターヴくんロボ、家の中を自由自在に歩き回ります。

結果、ギュスターヴくんロボの製作は、約半日くらいでできてしまいました。これはフォロの完成度の高さや、近年のプロトタイピング用マイコンボードの進化のおかげだと思います。
好きなもの、欲しいもの、困りごとを解決するもの。頭の中に少しでもアイデアが浮かんだならば、まずはやってみるときっと楽しいはずです。
この記事が気に入ったらサポートをしてみませんか?