
ピニオン角度とモータへの抵抗変動の変化についての考察

治具の取り扱い説明書で書いた「フレキシブルピニオンインサート」を作成した際、ピニオン角度を変化させることで周回タイムが変化しました。
※私以外からも同様の結果を報告していただきました。
元々大雑把に仮説は立てていましたが、その結果を受けて改めて資料の洗い出しを行いました。
今回はその仮説についてお伝えします。
まず、実証実験の条件と結果からお伝えします。
●条件

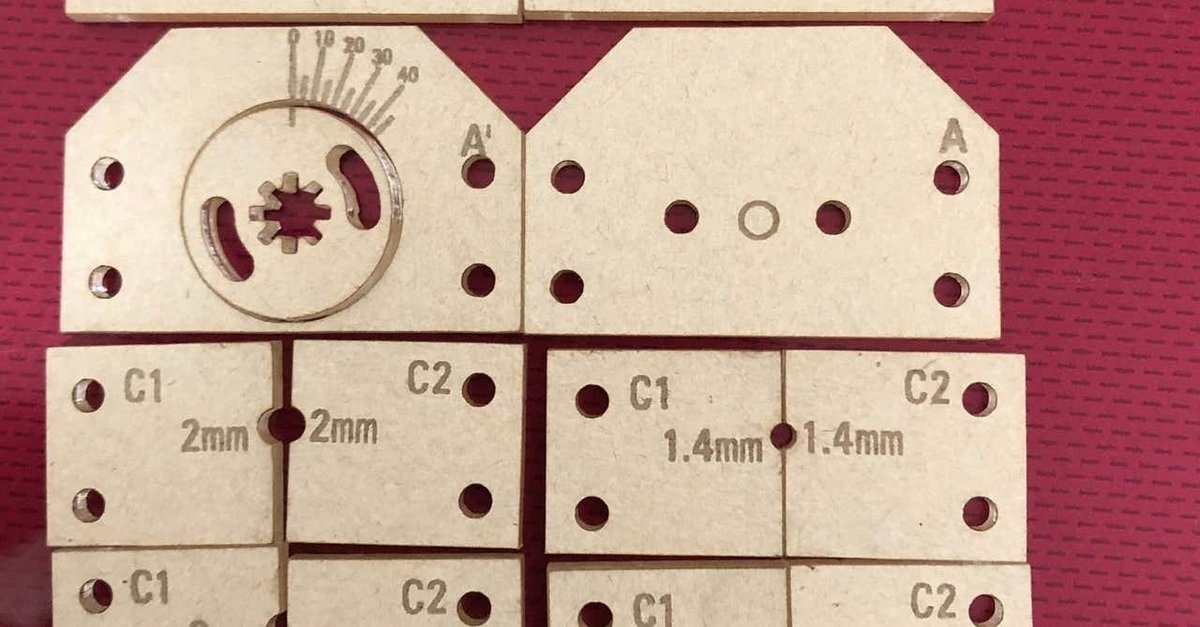
◎使用マシンデータ(上記写真で目視できる範囲は省略)
・モータ:ノーマル
・ギヤ:3.5:1
・電池:アルカリ(1.618V/本)
※電池はホームセンターで10本300円くらいでした。ロットはすべて同じで、電圧も小数点以下第3位まで同じものを使用しました。しかし、放電特性や内部抵抗などまでは確認できていないので、その誤差があることは先にお伝えしておきます。
◎測定方法

・コース:上記コース(岡山 G-WORKS様)
※ノーマルマシンでもかなり安定して走行できます。お子さんでも楽しめるので是非。
・1セットの周回数:5週
※利用時間と電池の本数の関係です(笑)
・クールタイム:15分/回
※ピニオン角度の確認と調整、モータの冷却の為
・ラップ測定方法:Lap Timer(スマホのアプリ)
※5週連続で測定する為、レーン数を1に設定
・測定順序:0度(ピニオン山-山位置)⇒22.5度(ピニオン山-谷位置)
⇒22.5度⇒0度の順
●結果

※【△】:ジャンプ時、コース側壁に当たってバランスを崩した周。
※タイム差:0度のタイムー22.5度のタイム
測定結果より、0度より22.5度のタイムが良くなっていることが分かります。
1秒以上の差がある場合もあったので、測定ミスを疑いました(笑)
実証実験については以上です。
※方軸については今回できていません。
次に、タイム変化の仮説についてです。
なぜ0度より22.5度のほうがタイムが良くなったのかについて仮説を立てていこうと思います。
まず、結論からお伝えします。
・モータへの抵抗変化の差が小さい=走行タイムが良くなる
これが仮説です。
では、それについて原理を説明します。
●仮説条件
仮説を立てるうえで固定する条件は・・
1.走行時の抵抗の総和を2とする。
2.前後のタイヤの抵抗は同じ。
3.タイヤ~カウンターまでの損失は無く、スパーとカウンターの比率も1:1とする。
4.この時の各カウンターの抵抗は1となる。
1~4の条件をイラストにすると下図の通りです。
この仮説の目的は4の条件を成り立たせる為です。理由は説明しやすいから。それだけです。
なお、両軸モータ搭載形式をモデルにしているのも同じ理由です。



この時のモータピニオンとカウンターは下図の様に動作しているとしてください。
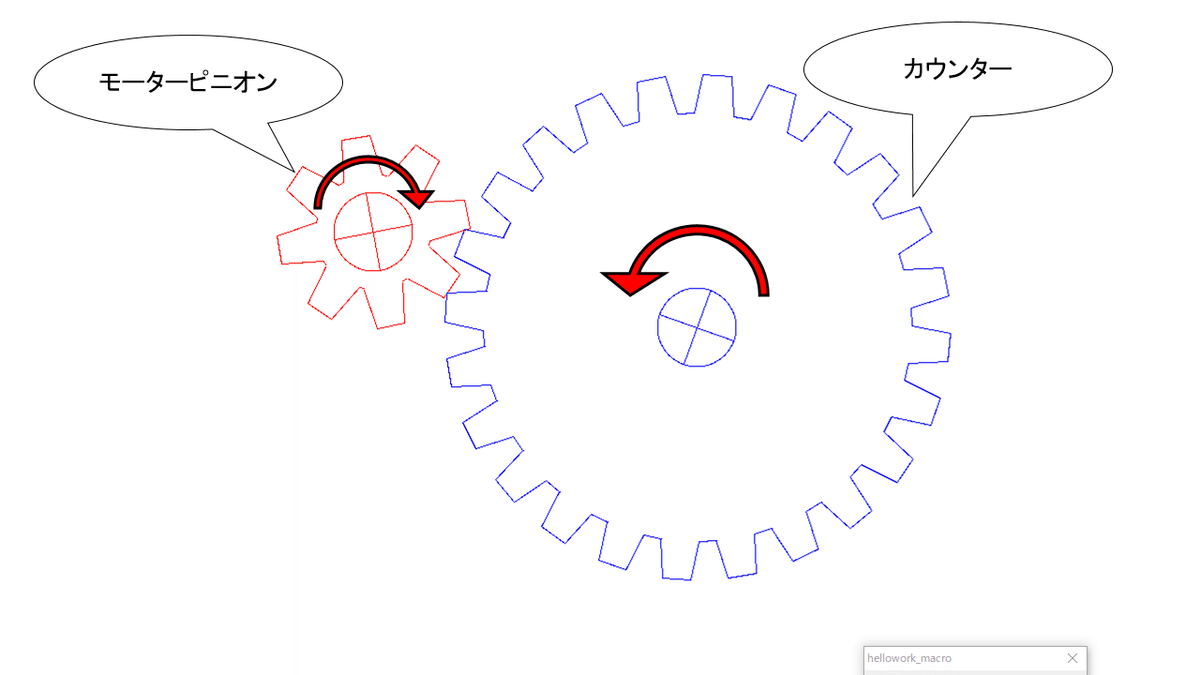
矢印が回転方向です。モータの回転はピニオンを用いてカウンターへ伝えられています。

この時、モータピニオンとカウンター間に発生する抵抗はこのように表せます。
Fm:モータピニオンに発生する抵抗
Fh:カウンターがモータピニオンに伝える抵抗
なお、この図はモータピニオンがカウンターに接触を始めた時(かみ合い始め)を表しています。

回転が進むとこの様にFhとFmが等しくなる点(ピッチ点)があり、

さらに角度が進むとこの様になります。なお、この図はモータピニオンがカウンターに接触している最後の瞬間(かみ合い終わり)を表しています。
〇0度の時のモータへの抵抗の変化
上図の抵抗の関係式(Fm=Fh/cosθ)をグラフにし、前後のピニオンの角度が同じ(0度、ピニオン山-山位置)の時、ピニオンが1回転するまでの各ピニオンの抵抗の変化を示したものが下図となります。
※θの範囲は-23~23度、2歯のエリアはかみ合い始めと終わりの2度分で計算

当たり前ですが、前後で同じ波形となります。
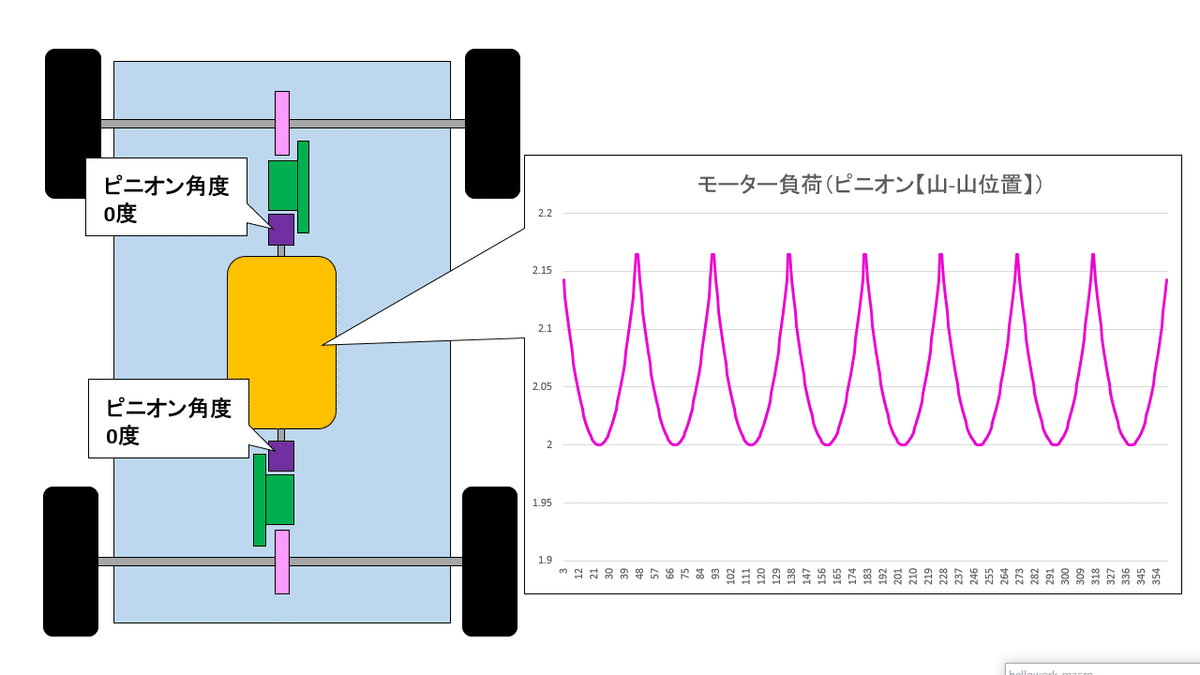
モータへの抵抗は前後のモータピニオンへの抵抗の合計で表すことが出来ます。
よって、0度(ピニオン山-山位置)の時、モータへの抵抗はこのようになります。
〇22.5度の時のモータへの抵抗の変化
0度と同様に22.5度(ピニオン山-谷位置)の時のモータへの抵抗を確認します。

抵抗の波形は前後で半位相ズレた状態になるので、この様になります。

その結果、22.5度(ピニオン山-谷位置)のモータへの抵抗はこのようになります。

比較すると22.5度(ピニオン山-谷位置)の方が振れ幅が小さくなっていることが分かります。

数値を表にまとめると、この様になります。
変動差は0度に比べて22.5度が圧倒的に少ないです。
また、面白いのは平均値が同じことです。

前述したこの実証結果と照らし合わせると、走行中の平均抵抗が同じでも、これだけのタイム差が生じたということになります。
つまり、これらの結果から導き出せるのが最初に述べた次の仮説です。
・モータへの抵抗変化の差が小さい=走行タイムが良くなる
実はモータ単体でもトルク変動という現象が発生しており、それが小さいほどモータ性能が良いと評価されます。
モータトルク=モータ抵抗なので、同様の理由でタイムに差が生じたと考えられます。
走行を見る限りでは、全体的にトルクが強くなった感じを受けたので、モータの性能を少し回転数寄りにすると、タイムが良くなるかもしれません。
※これは完全に私見です。
仮説と原理の説明は以上です。
なお、方軸については使用マシンがちょっと”アレ”だったので、プロぺラシャフトのピニオンが滑って測定できませんでした(;´Д`)
(前後超大径シリコン+ゴムリングプラローラは流石に・・・)
予想としては10度くらいが良さそうですが、使用モータのトルクやタイヤの抵抗などによってプロペラシャフトのねじれ量が変化すること。また、ピンククラウンの歯形が少々特殊な点を考慮すると、方軸は実走で微調整するほうが良いと思います。
後日またノーマルマシンでは測定しようと思います。
〇おまけ

両軸の場合の10度のグラフを比較したものです。やはり両軸では22.5が良さそうですね。
※歯車について補足説明
実際のギヤにはインボリュート歯形が採用されており、ピニオンとカウンターの角度が変化してもθが変化しないと思われるかもしれません。
しかし、それぞれの歯車の軸位置のズレや作成誤差、弾性変形に接触点での回転速度のズレなど、様々な要素が発生しているため、実際にピッチ点を頂点としたトルクの伝達率変化が生じています。
※参考文献 1)参照、準静的条件ですが・・・
今回は説明の伝えやすさの為、モーメントのみで説明しました。
ご理解のほど、よろしくお願いします。
【参考文献(一部)】
1)園田 計二「歯車の動力伝達効率測定に関する研究」
2)久保 愛三「歯車を含む動力伝達系の低振動・低騒音化の基礎」
3)小原歯車(株)「KHKの歯車ABC 基礎編」
他にも多くの資料を拝見させていただき、ありがとうございました。
この記事が気に入ったらサポートをしてみませんか?