Ubuntu22.04上でROS2とQtCreatorを連携させる(インストール・準備編)

目次
はじめに
QtCreatorでROS Workspaceを使用できるようにしました。 日本語版の手順説明が見当たらなかったことに加え、もう1度別PCで同じことをするので、備忘録として残しておきます。
最終的には、ROS2が動く GUI アプリケーションの作成が目標です。今回はそれに向けた第一歩です。
環境
OS : Ubuntu 22.04
Qt Creator : 13.0.0
ROS : Humble Hawksbill
すでにインストールされているものとして進めます。 Qt Creator のバージョンが分からない場合は、ヘルプ/Qt Creatorについて... から確認できます。

ROSのインストールについては公式のページを参照してください。
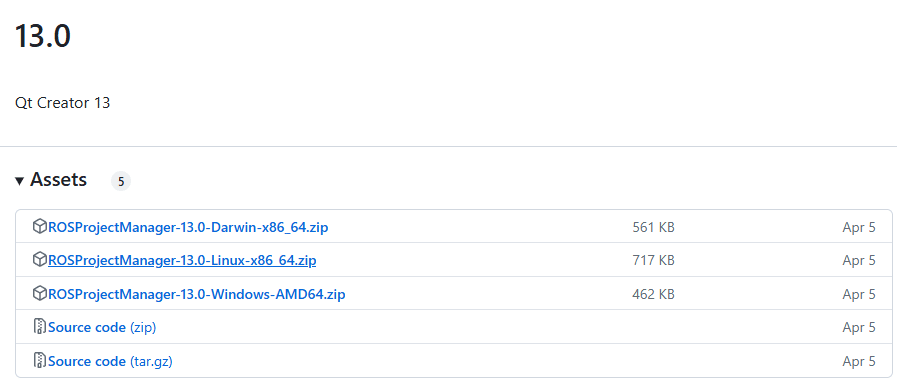
ros_qtc_pluginの入手
ここから入手できます。 自分のQt Creatorに対応したバージョンを選択してください。
Ubuntuを使用しているので、Linux-x86_64.zipをダウンロードします。
zipファイルの解凍は不要です。
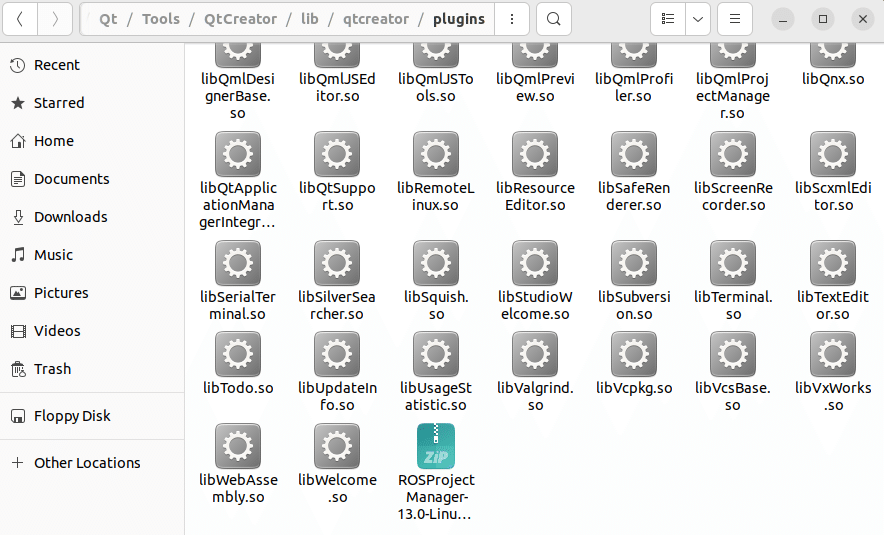
zipファイルをpluginsディレクトリに移動する
先ほどダウンロードした .zipファイルを Qt の plugins ディレクトリへと移動します。
plugins ディレクトリは /Tools/QtCreator/lib/qtcreator の中にありました。
プラグインをインストールする
Qt Creatorを起動し、上部バーのヘルプタブから「プラグインについて」を選択します。
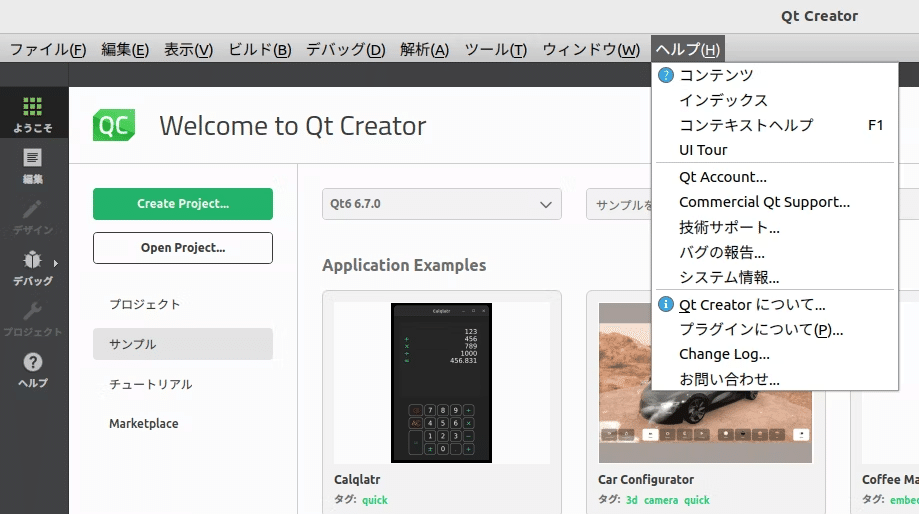
表示されたウィンドウ下部の「プラグインをインストールする...」を選択します。

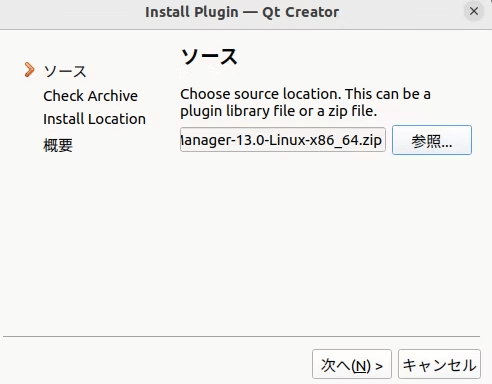
参照から、先ほど plugins ディレクトリへと移動した .zip ファイルを選択します。
後は何度か「次へ」を選択するだけです。途中のLocation設定は好きにしてください。
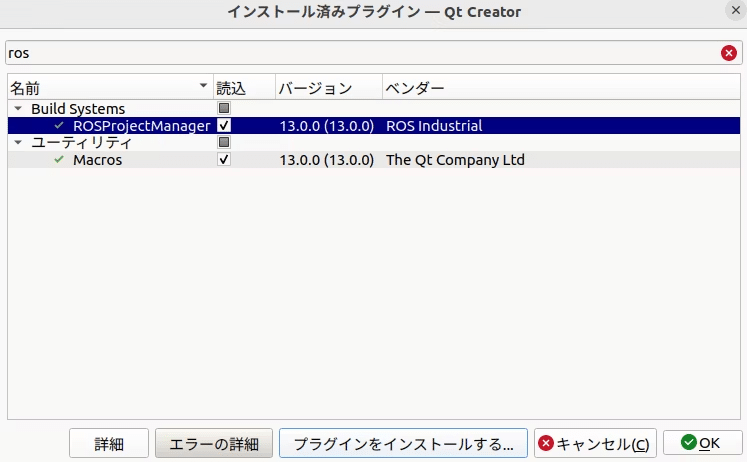
ros で検索すると、ROSProjectManager が見つかるはずです。
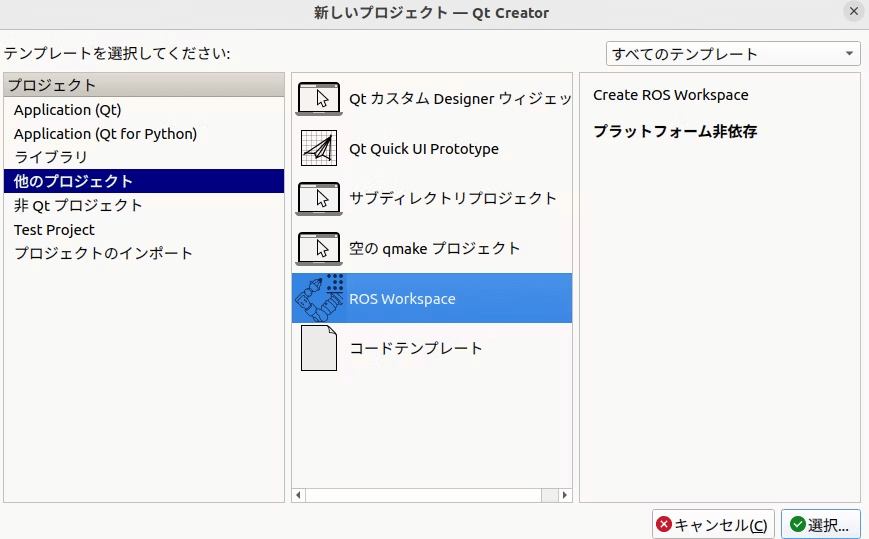
ROS Workspaceを作成する
「他のプロジェクト」の中にROS Workspaceが表示されるようになっているので、これを選択します。
プロジェクト名と使用するROSディストリビューション (今回の場合は humble)、ビルドシステム、プロジェクトのパスを選択します。
ROS2であれば、ビルドシステムはcolcon (コルコン) です。

これで、Workspaceの作成が完了しました。
次回はトピックの実装を行います。
この記事が気に入ったらサポートをしてみませんか?