ピッキングロボット作ります:#2 ロボットアームの構想

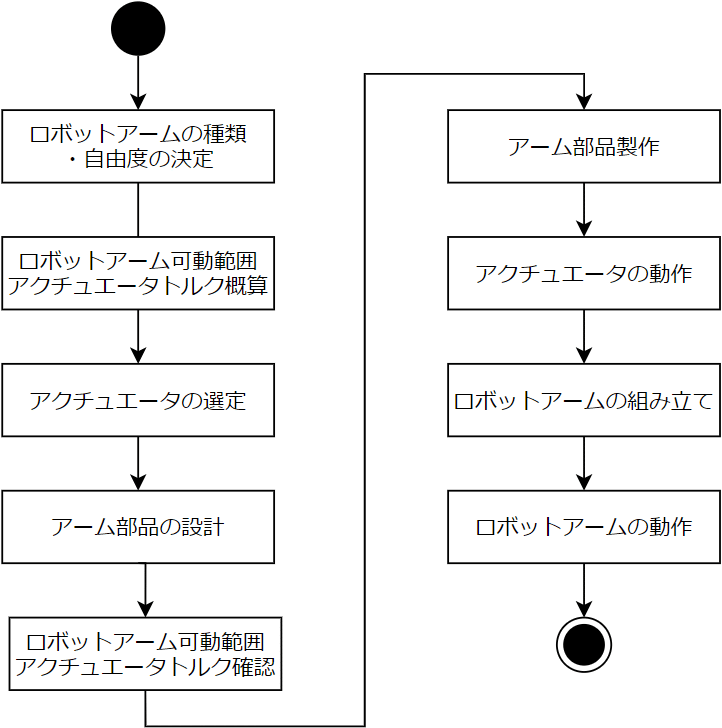
まずはアーム部分を作っていきます。概ね以下のような流れで作っていくつもりです。
ロボットアームの種類
分類の方法はいくつかあるようですが、今回は産業用ロボットを参考に、ロボットアームの機構(リンク・ジョイントの関係)をもとにした分類を紹介していきます。
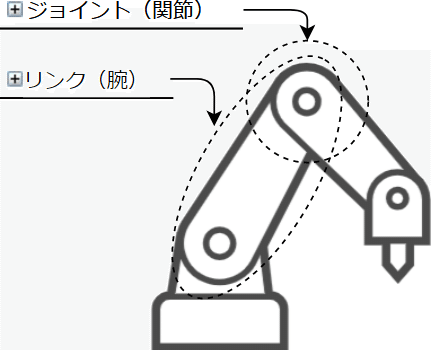
ロボットアームの動きを考えたり、分類するときには、「ジョイント(関節)」「リンク(腕)」を考えます。
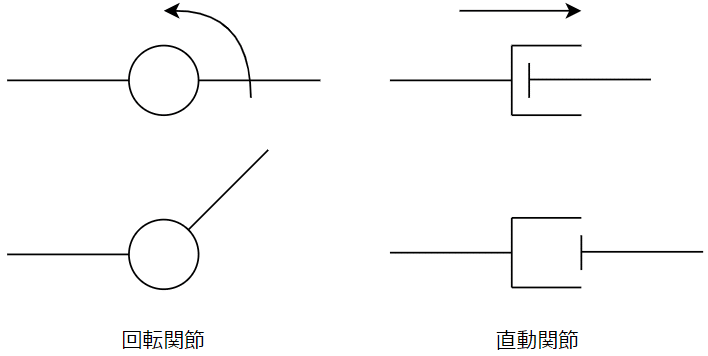
ジョイントは大きく2種類、「回転関節」「直動関節」があります。
回転関節は1つの軸を中心に曲がる関節で、直動関節は1つの直線に沿って長さが変わる関節です。
ジョイント・リンクの組み合わせによって、ロボットアームが作られます。
組み合わせ方によって、これまで様々な形のロボットアームが提案され、運用されています。
・直列型(Serial Link)
リンク―ジョイント―リンク―ジョイント―・・・の順番に連結されているロボットです。
ロボット全体のサイズが同じであれば、並列型よりも可動範囲が広いという特徴があります。
・並列型(Parallel Link)
1つのリンクに対して、複数のジョイントが接続されているロボットです。
ロボット全体のサイズが同じであれば、直列型よりも可動範囲は狭いものの、スピード・精度が高いという特徴があります。
直列型は下記のようなものが作られています。
・極座標型ロボット(Polar Robot)
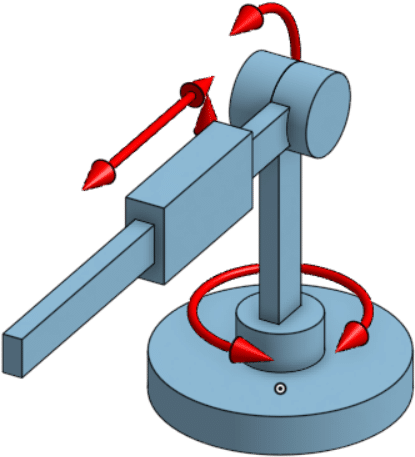
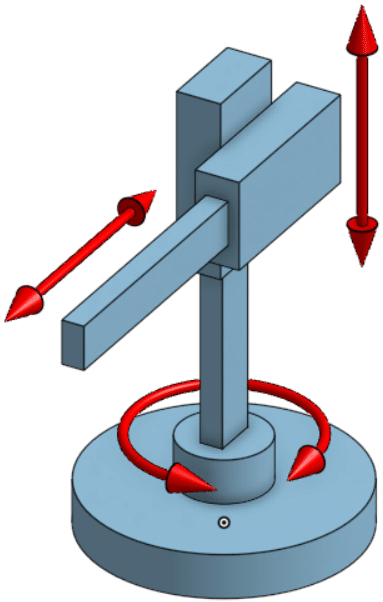
・円筒座標型ロボット(Cylindrical Robot)
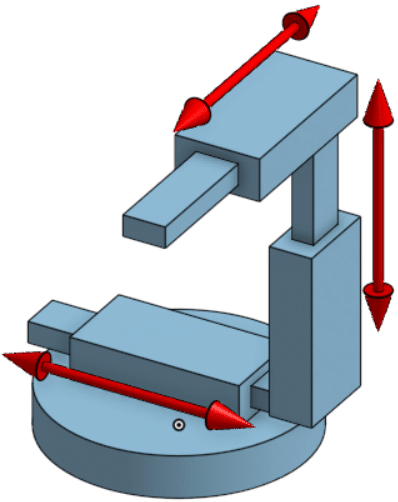
・直交座標型ロボット(Cartesian Robot)
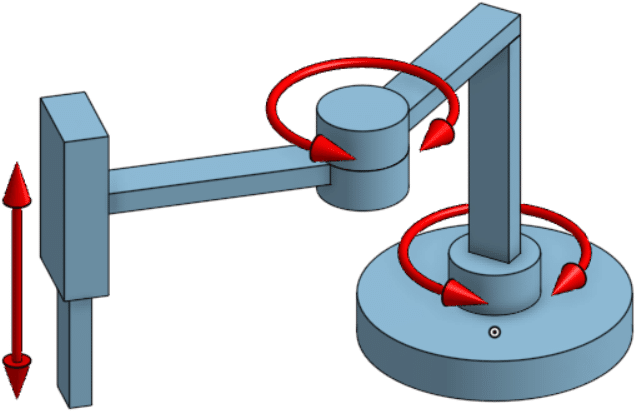
・水平多関節型ロボット(SCARA Robot)
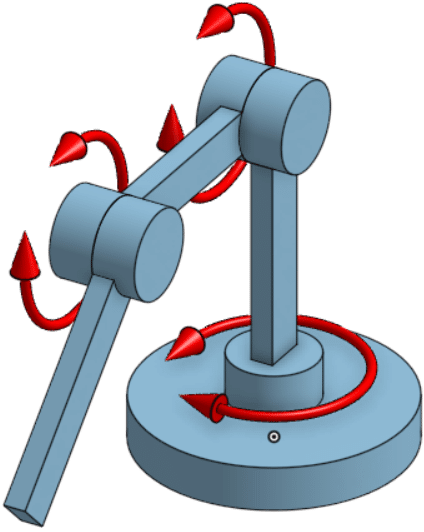
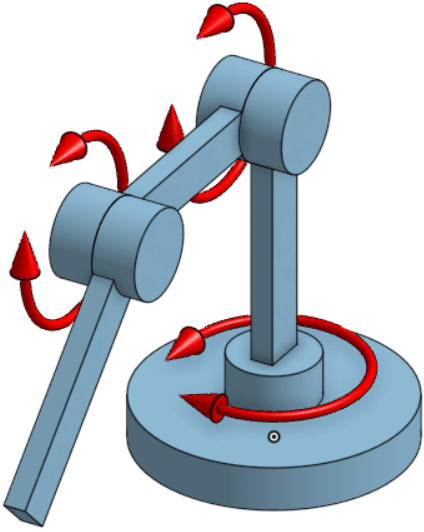
・垂直多関節型ロボット(Articulated Robot)
並列型は下記のようなものが提案されてきています。
・スチュワートプラットフォーム(Stewart platform)
・デルタロボット(Delta robot)
ロボットアームの自由度
「自由度」という言葉には物理・力学において厳密な定義があるようですが、僕が良く分かっていないことと、触れなくても今回のロボットアーム作成には支障がないため、ここでは触れません。
自由度とは、ロボットアームにおいてはロボット(の中でも主に手先)の位置・姿勢を指定できる能力を言います。関節の数と一致します。
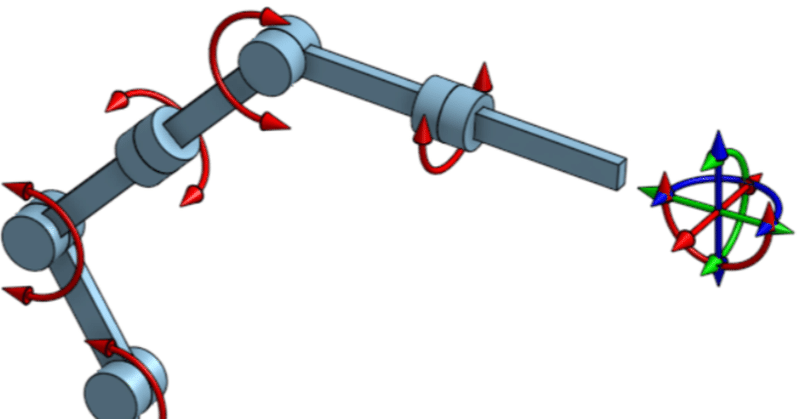
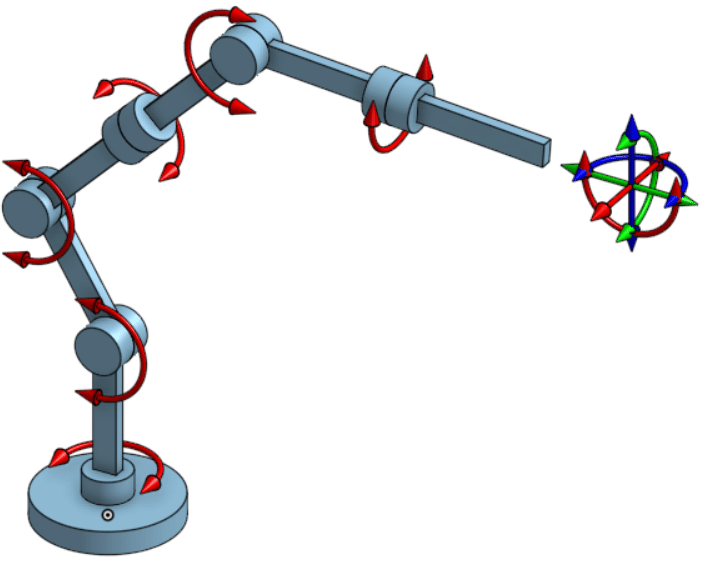
手先の位置・姿勢を指定する際には、それぞれX,Y,Z軸方向の直進と、X,Y,Z軸中心の回転を指定する必要があるため、少なくとも6自由度が必要になります。
もし、位置だけ(X,Y,Z軸方向の直進だけ)を指定すれば良いのであれば、3自由度があれば十分になります。上のロボットアームの種類の紹介で示した絵は、いずれも3自由度のロボットアームです。
7自由度ある(関節が7つある)ロボットもあります。人間の腕も7自由度あります。7自由度持つことによって、手先の位置姿勢(6自由度)を指定するほかに、余った1自由度を使って、肘の位置を制御することができます。肘の位置を変えることができると、肩と対象物の間に障害物がある場合、障害物を避けながら対象物に向けて手を伸ばすことができます。
以下の図は、6自由度の(関節が6個ある)ロボットアームです。
今回のロボットアームの仕様
ロボット作成の目的は、ロボットの理論への理解を深めることと、各種ツールの使い方の習得です。
ある程度動かせるものにしますが、最小限の構成に留めたいと思います。
そのため今回は3自由度の垂直多関節型ロボットを作っていきます。上で紹介したものと同じ形になります。
Webカメラと連携したピッキングするためには、最低限手先の位置を決める必要があるため、少なくとも3自由度以上必要になります。ただ、今回はできるだけ簡易的なものに留めたいとも思っているので、手先の姿勢(回転方向)の制御は見送ろうと思います。
垂直多関節ロボット以外を作ろうとすると、直動関節が必要になります。少ししか探していませんが、安価で簡単に取り扱えそうなものが見つからなかったため、今回は回転関節のみを使う垂直多関節ロボットにしたいと思います。
まとめ
今回はロボットアームの種類・自由度についてまとめました。
ロボットアームは「ジョイント(関節)」「リンク(腕)」から構成されており、ジョイント・リンクの組み合わせ方によって、ロボットアームが作られています。
今回作成するロボットは3自由度の垂直多関節ロボットにします。
それぞれのロボットアームの種類にどのような理論的背景があって、どのような特徴があるのかも調べたいとは思っていますが、またの機会にしようと思います。
ご意見、ご要望ありましたら是非ご教授ください。
参考
産業用ロボットにはどんな種類がある? 主な6タイプの特徴を解説
Basics: How Do I Choose a Robotic Arm?
この記事が気に入ったらサポートをしてみませんか?