Inventor / 駆動ユニット (14) LOD300 サーボモータの取付

前回はこちら
タイミングプーリーの位置に合わせて、サーボモータの取付を行います。サーボモータと取付ブラケットとセットにしたサブアセンブリモデルを作成し、そのアセンブリモデルをタイミングプーリーとベースプレートに拘束するという手順です。
サーボモータ
サーボモータは、GrabCAD参考元のモデルを流用します。

このモデルはSTEPファイルでした。ギアヘッドの部品に取付穴は開いていますが、穴フィーチャとしては認識されていません。そこで、スケッチを追加し、穴位置に点を配置しておきます。
サーボモータアセンブリの作成
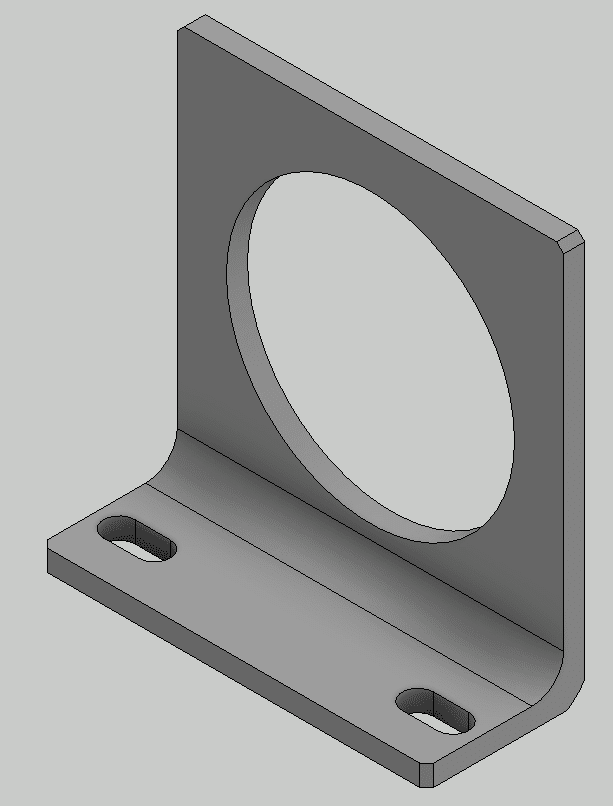
LOD200のスケルトンから、モータ取付ブラケットを作成します。

板厚9ミリの板材を曲げて作る様、詳細形状モデルを作成します。モータ取付穴は、後でボルト締結ジェネレータを使って開けることとします。
新規アセンブリモデルを作成し、モータ取付ブラケットを原点に配置します。
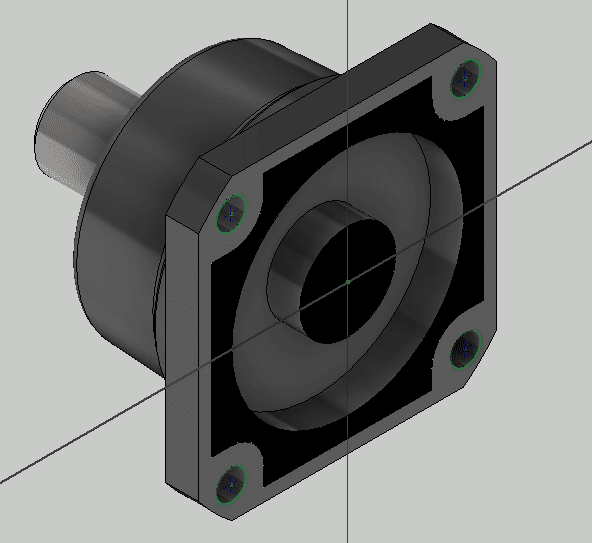
モータ取付ブラケットにサーボモータを取り付けます。ジョイントのリジッドで拘束します。

ボルト締結ジェネレータを使って、ボルトを配置します。同時にモータ取付ブラケットに取付穴が作成されます。


サーボモータアセンブリの配置
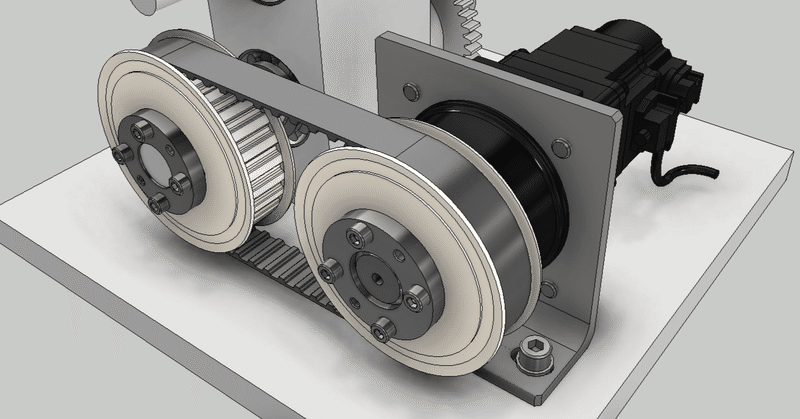
駆動ユニットにサーボモータアセンブリを取り付けます。スケルトンとタイミングプーリーの軸とモータの軸を拘束し、ブラケットの底面とベースプレートの上面を拘束します。モータの軸方向は、スケルトンのスケッチと拘束します。※ スケルトンとサーボモータアセンブリ間でコンポーネント同士を拘束しておき、取付方向の拘束を削除、軸同士で拘束、というやり方でも良い。この方が後から分かりやすいかも

ボルト締結ジェネレータを使って、ブラケットベースプレートにボルトを配置します。ベースプレートに開ける穴の位置は、スケルトンのスケッチを使って指定します。


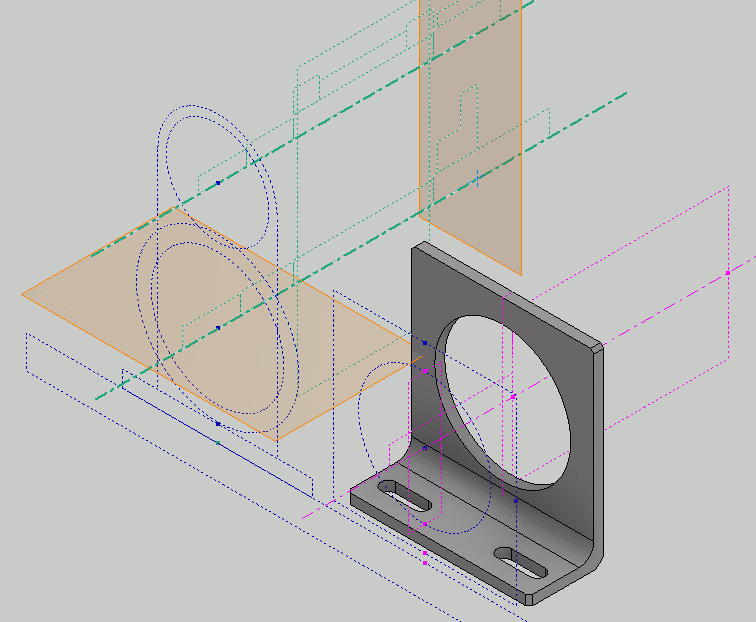
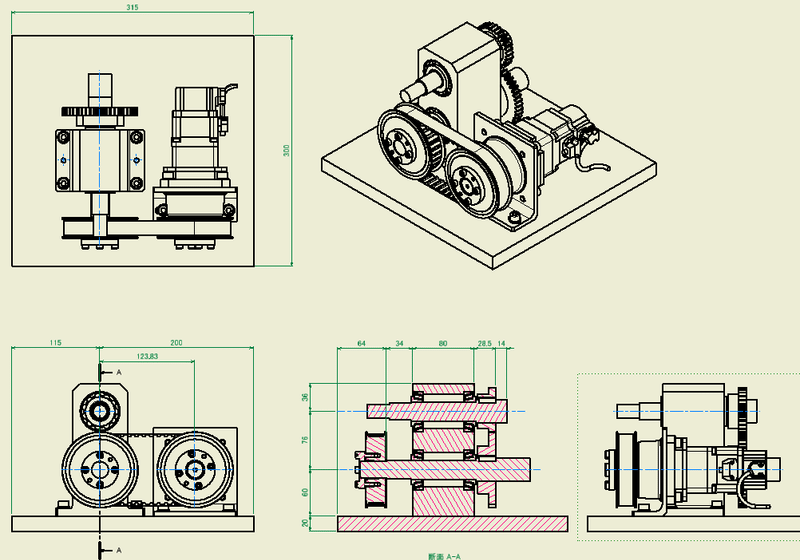
2次元図面で取り合いを確認します。
次回は、出力軸周りの詳細設計です。
役に立った!という記事にはぜひサポートお願いします。サポート頂けると大変に励みになります。