
Inventor / ダイナミックシミュレーション / Box and Plate 8 / 重力

外部荷重の一種である重力について説明します。
Box and Plate
重力
準備
重力の機能を確認するために、空間的ジョイントのプロパティ設定で、全ての自由度で、ジョイント荷重と強制モーションを無効(有効にするチェックを外します)にします。次に、一般タブの自由度のロックのチェックを外します。

これで、ボックスは自由に移動回転できる状態です。無重力状態です。
重力の設定
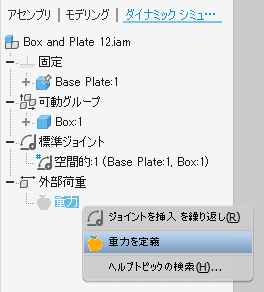
ブラウザ上の外部荷重に表示されている重力から、コンテキストメニューを表示し、「重力を定義」を実行します。
エンティティを選択し、重力の方向を指示します。固定されているモデルの面か稜線を選択します。あるいは、ベクトルコンポーネントを選択して、グローバル座標系での重力の方向を指示します。

ブラウザ上の重力がハイライト表示され、外部荷重として重力が加わります。

シミュレーション実行
シミュレーションプレーヤーで、シミュレーションを実行します。重力がかかるので、ボックスは重力の方向(画面の下方向)に落下します。
ただし、ボックスはプレートを素通りしてしまいます。これは何故かと言うと、ボックスとプレートの間の接触方法が定義されていないからです。そこで、新たに「接触ジョイント」を追加します。
接触ジョイント
ジョイントを挿入で、3D接触ジョイントを選択します。

お互いに接触するコンポーネントを選択します。ここでは、プレートとボックスを選択します。

荷重ジョイントとして、3D接触ジョイントが追加されます。

ここで、シミュレーションを実行すると、落下したボックスはプレートにぶつかった後、プレートの端面まで滑って行き、さらに落下します。
これは、ボックスがプレートに接触した際に、重力が吸収されてしまったからです。ダンピング(減衰)です。
3D接触ジョイントのプロパティを編集して、ダンピングが0(減衰しない)にして、再度シミュレーションしてみましょう。

今後は、ボックスがプレートに接触したあと、跳ね返るのがわかります。
3D接触ジョイントを使う事で、リアルなシミュレーションができる様に錯覚しますが、実際にはリアルではありません。それっぽく表示されるだけです。何故ならば、接触したときの反発、摩擦の影響が非常に大きいからです。これを正しくシミュレーションするのは大変に難しいです。
自由落下する様なシミュレーションは、派手なのでデモをするのには良いですが、正しい結果を予測するのは難しいです。なので、リアルなシミュレーションをするには、一意の動きをする機構で行うことが必要です。
自由度1+重力
空間的ジョイントの自由度を1(重力方向にのみ移動できる)にして、シミュレーションをしてみましょう。
ボックスが落下してプレートに接触。上方向にバウンドする結果となります。
まとめ
入門編では、簡単なアセンブリモデルを例に、空間的ジョイントの自由度を設定する方法で、ダイナミックシミュレーションを行う方法を説明しました。
自由度、荷重、トルク、重力を色々と編集し、動きを予測し、結果を確認することで、ダイナミックシミュレーションの振る舞いが直感的に理解できるようになります。
そうすると、実際のメカニズムを対象にしてダイナミックシミュレーションを行ったときに、悩まずにできると思います。
役に立った!という記事にはぜひサポートお願いします。サポート頂けると大変に励みになります。