
Inventor / ダイナミックシミュレーション / Box and Plate 4 / ジョイント機能のまとめ

Box and Plate のアセンブリモデルを例に、ジョイントを使ったシミュレーションの方法を説明してきました。この記事では、ジョイントについてまとめてみました。
Box and Plate
ジョイント座標系
ジョイントを作成したときにコンポーネントに追加される座標系。ジョイント座標系は、ジョイントのモーションおよび作用力を定義するために使用します。
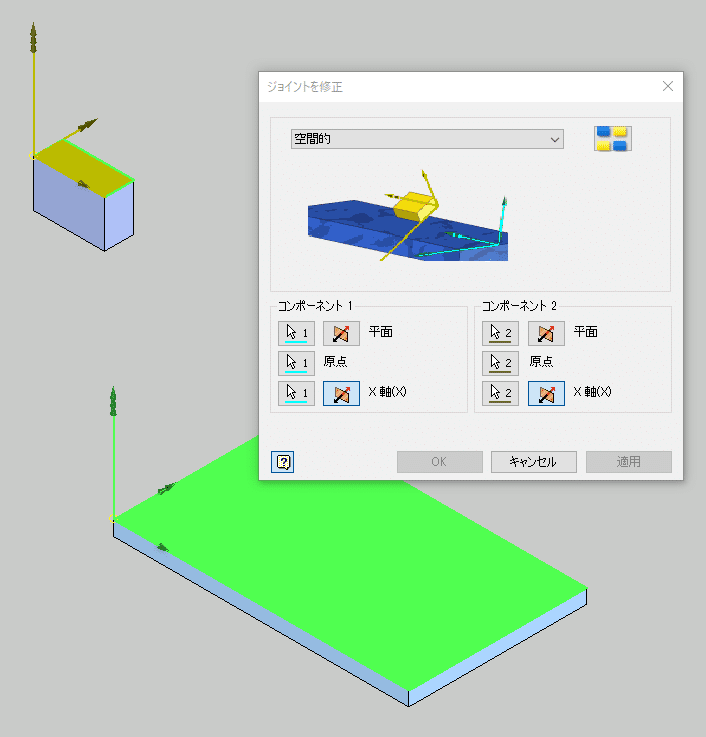
図の様に、Plate と Box のふたつのコンポーネントの間で、空間的ジョイントの設定を行う時、それぞれのコンポーネントの基準を指示します。これが。ジョイント座標系です。
ダイナミックシミュレーションでは、Plate と Box のふたつのコンポーネントはアセンブリモデル上のグローバル座標では無く、ジョイント座標系による位置と方向でコントロールされます。
開始位置をオフセット
以前の記事の操作手順で、開始位置のオフセットで「すべての初期値を0,0」としました。これは、、ジョイント座標系における現在の位置と向きを全て0とする操作になります。これを行うことにより、コンポーネントがグローバル座標においてどんな姿勢で合っても、ジョイント座標系では 0 にセットされます。
これは、例えば、「今の位置から300mm移動」と「45度回転」という時、そのまま、300mmとか45°と入力すれば良くなるので、大変に便利です。
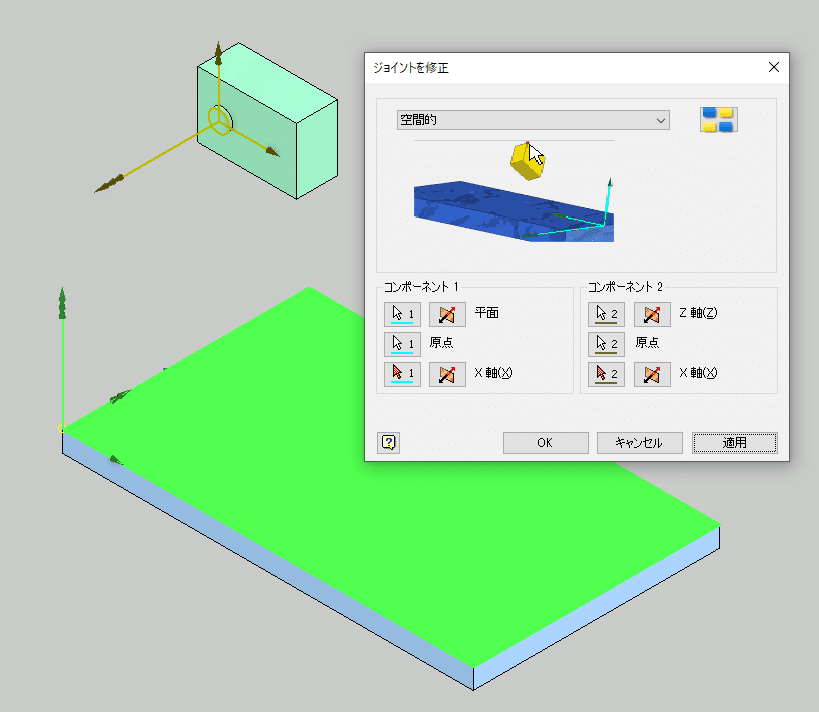
回転中心
ジョイント座標系の各基準軸(x, y, z)は、回転運動するときの回転中心となります。コンポーネントの基準を指示するとき、面とエッジしか選択できないので、回転中心としたい位置に、穴あるいはボスの形状を付加しておく必要があります。
※ データセットのBox and Plate 08 回転中心.iamを参照
Box and Plate 08 回転中心.iam
ジョイント荷重 vs. 強制モーション
ジョイント荷重は、荷重を加える時の、動きの結果を知ることが出来ます。逆に、強制モーションは、させたい動きから、必要な荷重を知ることができます。
構想設計の時は、させたい動きが先に決まりますから、強制モーションを使って、シミュレーションします。
デザインチェックするときは、使用されている機器の駆動力(あるいはトルク)が決まっていますから、ジョイント荷重(あるいは外部荷重)をつかってシミュレーションします。
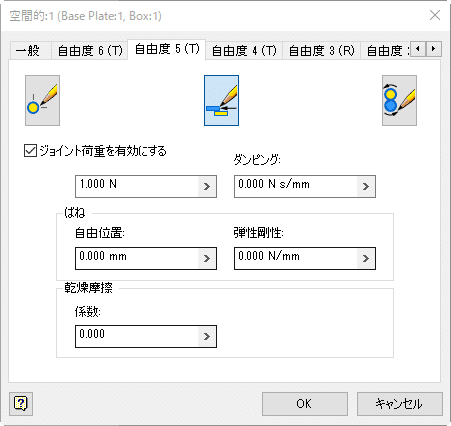
ジョイント荷重(応用)
ジョイント荷重は、駆動時だけでなく、被駆動時に発生する荷重(反力)も設定できます。
ダンピング:コンポーネントの現在の速度に比例する反力(ショックアブソーバーなど)の設定
ばね:自由位置に対するコンポーネントの変位に比例して発生する反力(ばねなど)の設定
乾燥摩擦:コンポーネントが受ける荷重に比例する反力の設定
強制モーション(応用)
強制モーションは、モーターやエアシリンダなどのアクチュエータが決まっていなくても、希望する動きを設定できるのでとても便利です。
主に使用するのは、位置の設定です。いわゆるタイムチャートと同様の設定ができます。この場合は、入力グラフで設定します。
入力グラフ
時間と位置(あるいは時間と速度など)の設定を、グラフの作成で行える機能です。
始点と終点での時間と位置を入力すると、図の様にグラフ表示されます。

緩和曲線
位置が直線的に変化するグラフの場合、始動直後から定速になる必要があります。このためには、始動直後の加速度は無限大になってしまいます。
これを回避するために、滑らかに移動するよう緩和曲線にすることができます。下の図の様に、速度が上に凸の曲線になり、初速=0から滑らかに変化していることがわかります。

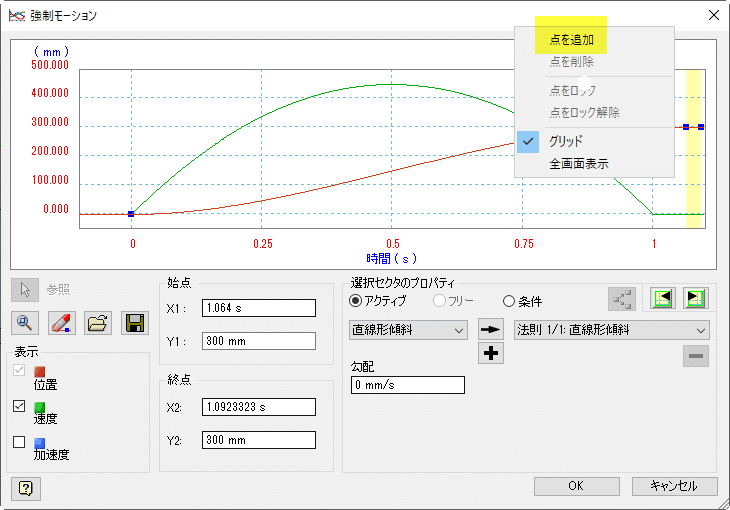
モーションの追加
前進して停止、後退して停止 という往復の動きをさせたい時は、モーションを追加します。
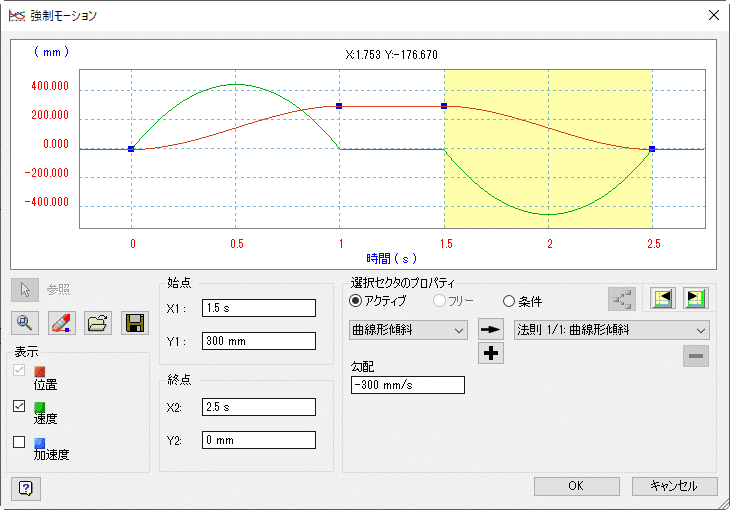
図のグラフの右側で、コンテキストメニューを表示し、点を2つ追加します。図様に、追加した2点の間が黄色くハイライトされます。
始点をX=1.5秒 Y=300、終点をX=2.5秒 Y=0 とすると、入力グラフが以下の様になります。

こちらも同様に緩和曲線にします。
シミュレーションプレーヤーの時間を1秒から3秒に変更して、シミュレーションを実行すると、往復の動きが確認できます。
動画
往復の動きを動画にしました。
データセット
Box and Plate 07.iam と Box and Plate 08 回転中心.iam を追加しました。
役に立った!という記事にはぜひサポートお願いします。サポート頂けると大変に励みになります。