
超音波球面モータ(2013年5月10日追記)

はじめに
球面モータは、可動子を、回転中心点周りの任意の方向に回転させることができるモータで、さまざまな駆動原理のものが考案されています
本noteでは、球面超音波モータと球面超磁歪モータの研究を紹介します
球面超音波モータに関して
海外の研究を見たことがありません
いつ爆発的に普及してもおかしくないところまで研究が進んでいるので
国産技術として花開いてほしいと思っています
超音波球面モータ
球面超音波モータ(東京農工大)
東京農工大の遠山は超音波モータの保持・駆動トルクの大きさを生かしてロボットの関節駆動を想定した球面超音波モータを開発した。1軸の回転型超音波モータの駆動部である円環状振動子で球体のロータを3方向から挟みこむ。目標方向の駆動トルクをそれぞれの超音波振動子の駆動トルクに分解し、それぞれの振動子が対応する駆動トルクを発生するように制御を行い、ロータを球面3自由度駆動する。

深谷,和田,菊地,古屋,遠山;「超音波モータを用いた人工の腕の開発」,ライフサポート, Vol.12, No.4, pp.131-136, 2000
球面超音波モータ(株式会社OK-Robotics)
球面超音波モータ(東芝)
株式会社東芝の高橋らは、3個の超音波振動子で球体をインパクト駆動する3自由度球面モータを試作した。ステータ中央の電磁石で球体のロータを吸引して超音波振動子に与圧をかける。ロータと接する3個の超音波振動子はそれぞれ任意の方向に楕円運動を行うことができる。3個の超音波振動子がロータを直接目標方向に駆動する。
「球面モータ」,東芝レビュー, Vol.63, No.3, 2008
球面超音波モータ(東京工業大学)
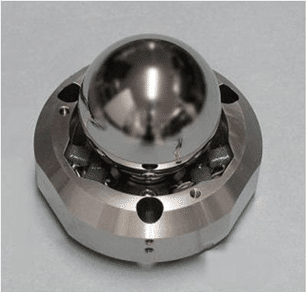
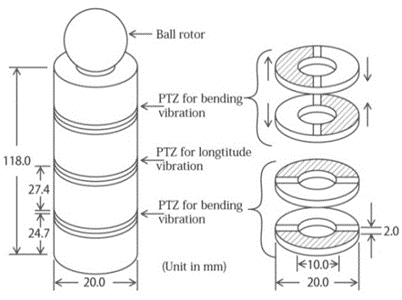
東京工業大学の中村らは共振振動周波数が異なる圧電素子を組み合わせ、ロータを3軸周りに回転させる小型球面超音波モータを試作した。2つの曲げ振動2次モードと縦振動1次モードを利用している。2つの曲げ振動モードを組み合わせると垂直軸回り、曲げ振動モードと縦振動モードを組み合わせると水平軸まわりにロータが回転する。3つの振動モードを組み合わせて任意方向にロータを直接駆動する。
T.Amano, T.Ishii, K.Nakamura, S.Ueda; “An ultrasonic actuator with multidegree of freedom using bending and longitudinal vibrations of a single stator”, Proceedings of IEEE Ultrasonics Symposium, pp.667-670, 1998
球面超音波モータ(慶応大学)
慶応大学の前野らは直径10.0 mm、全長31.9 mm、質量16.9 gの球面超音波モータを試作し、能動鉗子のグリッパの付け根の球面駆動に用いた 。内視鏡や手術支援用機器への応用が期待されている

S.Park, K.Takemura, T.Maeno; ”Development of Multi-DOF Actuator for Surgical Tools”, Proceedings of the 32nd International Congress and Exposition on Noise Control Engineering, pp.3039-3046, 2003
球面超音波モータ(東京大学)
東京大学の高瀬らは、積層型圧電素子4つを導電性接着剤で接着し、ロータとして用いる直径5mmの鋼球を各圧線素子の上部に配置した直径1mmのルビーボールと接触させることによりロータを球面3自由度駆動する球面超音波モータを試作した

高瀬龍馬,保坂亮,森田剛;「積層圧線素子を用いた多自由度超音波モータ」, 2007年度精密工学会春季大会学術講演会講演論文集,pp.1023-1024, 2007
球面超音波モータ(室蘭工業大学)
室蘭工業大学の青柳学らは、多重モード円環振動子の固有振動を利用して球状回転子に多自由度回転運動を発生できる超音波球面モータを開発している

青柳学,富川義朗,高野剛浩;「多重モード円環振動子を用いた多自由度超音波モータの構成」,日本音響学会研究発表会講演論文集,pp.979-980,1999

http://www2.iee.or.jp/~dld/MDD/aoyagi.html
おわりに
とりあえず、2012年9月以前の研究を中心に上げました
随時、追記していく予定です
本noteは私の備忘録ですが、自由に読んでください サポートは、興味を持ったnote投稿の購読に使用させていただきます