【学問を「イカ東」しよう!】航空宇宙工学徒から見るロケット・飛行機・人工衛星

UT-BASEがお送りする「後期課程の歩き方」(学部学科紹介)は、後期課程での学生生活を紹介しています。しかし、今この拙文をお読みいただいている好奇心旺盛・頭脳明晰な読者の皆様は「どんな雰囲気かは分かったけど、具体的に何が学べるのだろう…?」とお思いのことでしょう。
そこで!!「学部学科紹介イカ東edition」、つまり、東大生が所属学部で学んでいることを"エンジン全開"で語り倒す企画を実施することになりました!
一端の学部生が書いているので学問的誤りがあるかもしれませんが、学問の雰囲気を掴んでいただくことを趣旨としておりますので、間違いはUT-BASEに優しくそっと教えていただくよう、どうぞよろしくお願い致します。
さて、本記事は「文系からは入れない」ことで有名な工学部航空宇宙学科についてです!2020年、Web記事のアップや文面校正を行っていたUT-BASEの望月がお送りいたします。お楽しみあれ。
また、工学部航空宇宙学科の制度や学生生活は、UT-BASEの学部学科紹介ページをご覧ください。
三者三様のロケット、飛行機、人工衛星
さて、皆さんご存じの工学部航空宇宙工学科では、ロケットや飛行機、人工衛星について勉強するわけなのですが、皆さんは飛行機とロケットと人工衛星の違いをどれだけ理解しているのでしょうか。
「え?飛行機とロケットと人工衛星って全く違うじゃん!だって、飛行機は水平に飛んで、ロケットは垂直に飛んで、人工衛星は宇宙を飛ぶんでしょ?」
確かにそうです。ですが、その違いがどれだけ大きく、それぞれの技術を開発することがどれだけ難しいかを語ることのできる人は少ないのではないでしょうか。
そこでここでは航空宇宙工学科ではどのようなことを学んでいるかの一部をご紹介することと致します(ただの学部生がこの記事を書かせていただいておりますので、誤り等を含んでいることもあるかと存じますが、誤りを発見した方はUT-BASEの方へそっと優しくお伝えしていただければ幸いです)。
これから章を分けて、ロケット、飛行機、人工衛星について一つ一つ説明していきたいと思います。
┈┉┅━┅┉┈
#1 ロケット ~地球から宇宙へ~
┈┉┅━┅┉┈
ロケットと言って皆さんが思い浮かべるのはアメリカのアポロ計画やスペースシャトル計画などでしょう。そんな皆さんに質問です。
宇宙にロケットや人工衛星を宇宙へ持っていくためにはかなりの燃料が必要になりますが、
宇宙に運ぶことのできるモノ(ペイロード)の質量は、ロケット全体の質量の約何%でしょうか?
※ロケット、飛行機ともに機体内に積載しているもののことをペイロードと言います。この後も出て来るので覚えておいてください。
 (写真:ディスカバリー号の発射 出典はコチラ)
(写真:ディスカバリー号の発射 出典はコチラ)
ここで正解をズバリ答えてしまってもいいのですが、どのように求めるのかに興味がある人もいると思うので、計算して求めてみましょう。
しかしその前に、前提知識として宇宙に行ったロケットがどのような軌道をとるのか、また、ロケットがどのようにして方向を変更するのかについてお話しておく必要があります。
一般的に、打ちあがったロケットは宇宙空間の地球低軌道(LEO: Low Earth Orbit)に一度入ります。ロケットはそこを7.9km/s程度の速度で航行した後、目的の軌道へと遷移していきます。宇宙でどのように軌道を遷移していくかに関しては、3章「人工衛星」で説明するのでそちらを参照してください。
※因みに、宇宙空間では地上とは異なって一度ロケットが低軌道など特定の軌道に移ったらエンジンを使用しなくても同じ軌道上をずっと動き続けることに注意してください(実際には何もしなくてもロケットの軌道は少しずつずれていってしまうのですが、今回は概略を説明しているためその点は省略させていただきます)。

また、ロケットは(飛行機、人工衛星も大体同様ですが)、行きたい方向とは逆方向に燃料を放出することで進む方向の制御をしています。これは、「物体の運動量は保存する」ということを用いているのです。

さて、これで準備が整いました。いよいよロケット全体の中でペイロード自体の質量がどの程度であるのかを概算してみることにしましょう。
下図のようなロケットを考えます。先述したように、ロケットが宇宙に出て低軌道上に乗るまでに7.9km/sもの速度まで加速しなければなりません。そこで、ロケットが発射してから低軌道に乗るまでにロケットが獲得した速度をΔVとおくことにします。また、打ち上げる前の質量をMi、低軌道に乗った時の質量をMf、燃料を排出する速度をu (一定)とすると、次の図のようにΔVが求まります。ここでは簡単のため、重力加速度gによる効果は無視し、真上にロケットが進むこととしています(物理好きまたは数学好きの人はぜひ自力で解いてみてください)。

上の式や問題条件を見て、ロケットに詳しい人やスペースシャトルの打ち上げ等を見たことがある人は、少し疑問に思うと思います。本来は、ロケットが低軌道に到達するまでにロケットの両端にあるブースターが分離されるはずだと。それに気づかれた方はさすがです!
ただ、上では敢えてメインエンジンやブースターなどの切り離し(MECO:Main Engine Cut Off)がない一段式ロケットとして計算してみました(ロケットの燃焼を切り離す回数によって一段式ロケット、二段式ロケットなどに分かれます)。ブースターを分離するパターンに関してはもう少し後で述べますのでしばしご辛抱ください。
ここで、ΔVとuに標準的な値を代入することで初期質量Miと最終質量Mfの比(MR)を求めます。ロケットが獲得する必要のあるΔVの値は大体ΔV=10km/sです。(この10km/sには、低軌道に乗る際に必要な速度である7.9km/sに空気抵抗や重力による影響などの損失分が加わっています。)また、一般的な化学推進剤の排気速度(u)は4km/sです。
これらの値から、実際に、質量比(MR)を求めると12.2となるため、最終質量は初期質量のたった8.2%程度しかないことがわかります。すごく少ないですよね。
しかしながら、ペイロード自体は実は8.2%よりももっと少ないんです。その理由は最終質量の中にはペイロードの質量に加えて燃料を外へ排出するために必要な構造部材の質量も含まれているからです。構造部材は搭載された燃料の実に10~20%もの質量を有しています。この部材の質量を考慮すると、ペイロードとして使用できる質量は全体の -12 ~ -2%となってしまいます。パーセンテージが負になってしまった!?
そうなんです、一段式ロケットを用いてペイロードを宇宙空間に持っていくことができないんです!
そこで、一般的にペイロードを宇宙空間に運ぶためには多段式ロケットが使用されています。
下図には二段式ロケットの場合のΔVとその他の関係式を記載しました。多段式になると、やっとある程度のペイロードを積んで打ち上げることができるようになりますが、その積載可能量はロケットの全質量の1~3%程度です。
そうなんです、こんなに努力してもたった数%程度しかペイロードを積載することができないんです!!これで宇宙にモノを運ぶことがどれだけ大変なのかがわかったのではないでしょうか。事実、スペースシャトル計画で用いられたロケットの全質量は2,040,000~2,050,000kg程度[1]なのに、低軌道には24,300~24,400kg程度[2]と、質量全体の1.2%のペイロードしか持っていくことができなかったのです。
[1] Space Shuttle Ascent: Mass vs. Time (TEXAS INSTUMENTS)より
[2] Shuttle Technical facts (THE EUROPEAN SPACE AGENCY)より

ここまでの話を聞くと、「宇宙旅行なんて夢のまた夢じゃん!」と思われる方もいるかと思いますが、実はこれとは少し異なった別の方法で宇宙旅行を実現しようとしている会社がいくつか存在しています!宇宙旅行に興味のある方は、色々と調べてみるとよいでしょう。
これらの話は航空宇宙工学科の「宇宙工学入門」や、「宇宙工学演習」などの講義で学ぶことができます。興味ある方はこれらの講義をとってみるといいかもしれないですね。
┈┉┅━┅┉┈
#2 飛行機 ~飛行の原理~
┈┉┅━┅┉┈
第1章で説明したロケットは、かなりペイロードが少なかったですよね。ですので、「まさか、飛行機も同じ割合くらいしかペイロードを運ぶことができないの?」と思う方もいるのではないでしょうか。その疑問への答えは「いいえ」です。飛行機の場合は大体15~20%程度のペイロードを運ぶことができます。ロケットも飛行機も同じ大気中を飛んでいる機体なのに、どうしてこれほどまで運べるペイロードに差ができてしまうのでしょうか?
そこで第2章では飛行機の飛行原理について、少し詳しく見ていくことにしましょう。
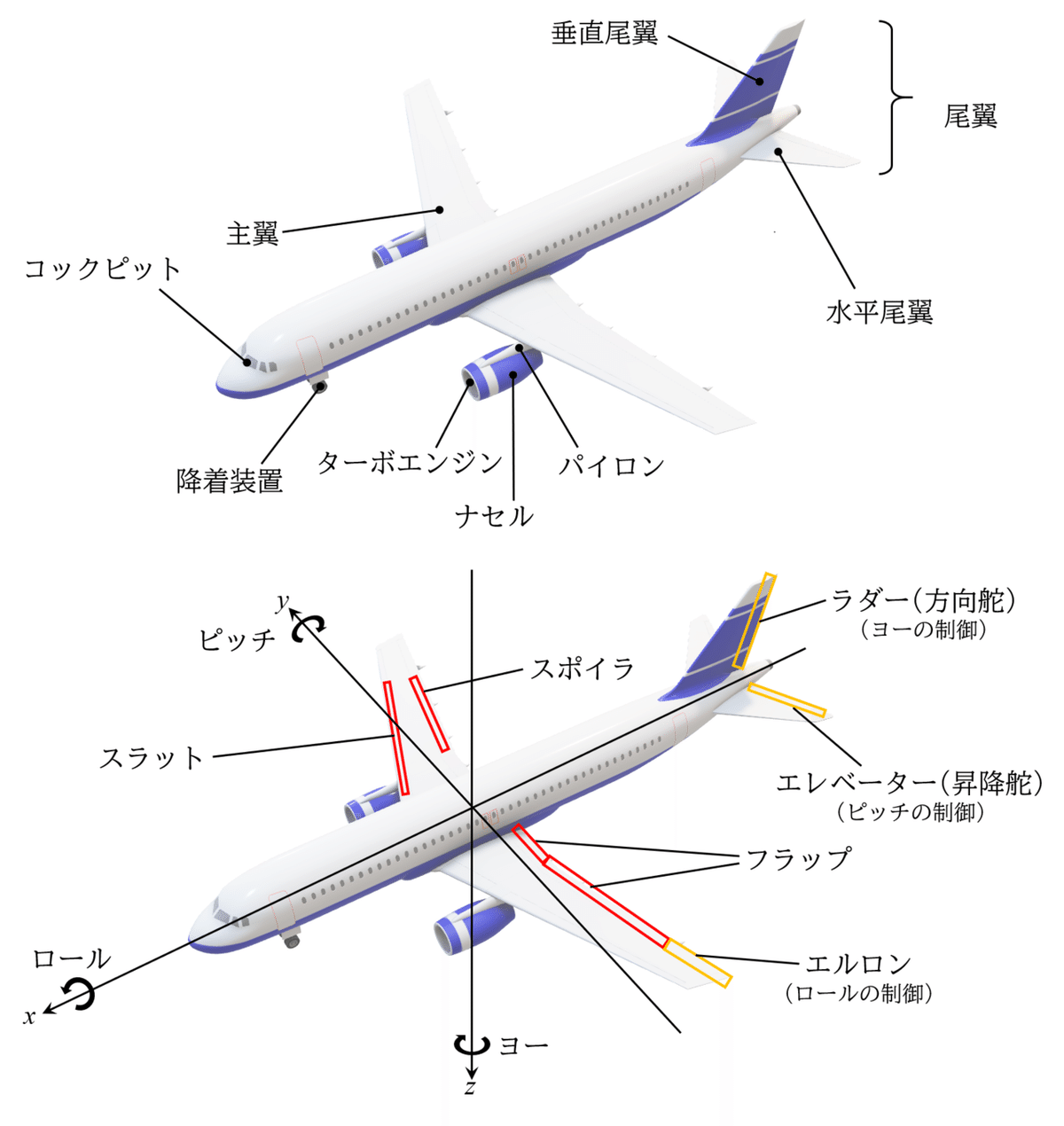
その前にせっかくなので飛行機を構成する要素について紹介したいと思います。上図をご覧ください。コックピットや主翼、尾翼あたりは何となくわかる人も多いと思いますが、それぞれどのような働きがあるのかはご存じでしょうか。詳しく説明すると非常に長くなってしまうので、詳しく学びたい方は「航空機力学第一」、「航空機力学第二」、「航空機力学第三」を履修してみる、または、ご自分で調べてみてください。ここでは簡単に説明して終わろうと思います。
ナセル:エンジンを入れ、保護する部分。
パイロン:エンジン部品を胴体と結合する部分。
スポイラ:揚力や空気抵抗などを大きさを変更する部分。
スラット:揚力を大きくする際に使用する部分。
フラップ:揚力や空気抵抗を調整する部分。
エルロン:機体の回転の動き(ロール)を制御する部分。機体が旋回する時などによく用いられる。
エレベーター:機体の上下の動き(ピッチ)を制御する部分。機体が上昇・下降する際によく用いられる。
ラダー:機体の向かう方向(ヨー)を制御する部分。機体の方向を変更する際によく用いられる。
(※揚力とは、飛行機が上昇する際に必要な力です。もう少し後で説明します。)
以上のように、飛行機には数多くの部品が備え付けられているんですね。皆さんが今後、飛行機を使って旅行や留学に行った際や、空港に足を運ぶ機会があった際には、上でお伝えした内容を頭の片隅に入れて飛行機を眺めてみてください。きっと前よりも飛行機を見るのが楽しくなるのではないでしょうか。
さて、飛行機がどのようにして空を飛んでいるかの説明に戻りましょう。
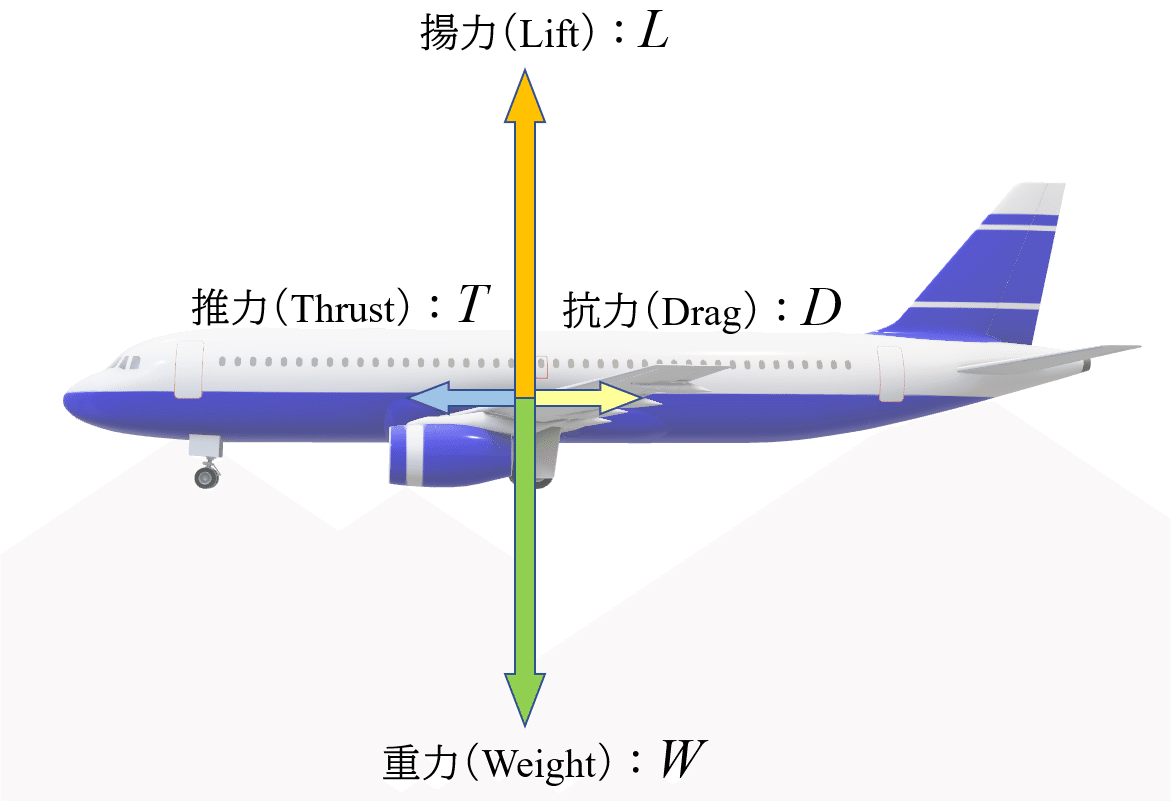
飛行機が大気中を飛行しているとき、飛行機には大きく分けて4つの力が働いています。重力・抗力・推力・揚力の4つです。それらが下図のようにバランスすることによって安定して飛行することができるのです。
飛行機自体は物体なので当然ながら重力が発生します。また、飛行機は図で言う左側に進んでいるのですからもちろん空気抵抗などの影響を受け、抗力が発生します。また、飛行機は進行方向に飛行するため、エンジンを用いて推力を発生させます。ここまでは何となく理解できることと思います。
それでは揚力はなぜ発生しているのでしょうか?エンジンは水平方向(厳密には少し異なりますが)にしか力を発生させていないのに非常に不思議ですよね。しかも、図を見て気づかれる方もいるかと思いますが、エンジンで発生させた推力よりもはるかに大きい値の揚力が発生するのです。機種によっても変わりますが揚力は推力の大体15~20倍もの大きさになります。この揚力はどこから発生するのでしょうか?
それを知るためには、空気力学(流体力学)を勉強しなければなりません。以下では、空気力学で学ぶ内容をつまみ食いしてお伝えします。
揚力が生じる理由を説明する方法はいくつかありますが、その中で今回は「ベルヌーイの定理」を用いた方法を説明しましょう。
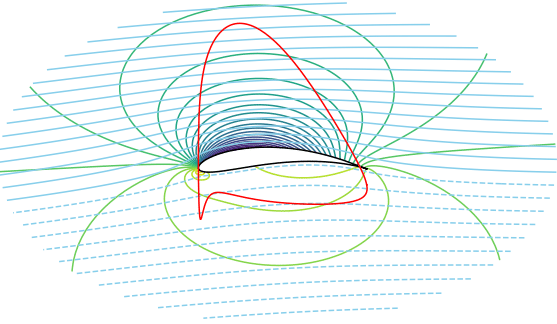
皆さんは「ベルヌーイの定理」という言葉を聞いたことがあるでしょうか?ベルヌーイの定理とは、要は流体力学におけるエネルギー保存則のようなものです。特に、流体がほとんど水平に流れている場合は下の図に書かれたような式が成り立ちます。今回のケースに合わせてもう少し簡単に言いますと、「流れが速いと圧力が小さくなり、流れが遅いと圧力が大きくなる」となります。これが揚力の発生原因です。

飛行機の主翼断面は上の図のような形をしており、翼の上を流れる流体の方が翼の下を流れる流体よりも速度が速くなります。すると、先ほど述べたベルヌーイの定理より、上の圧力が小さくなり、下の圧力が大きくなります。そうすると、相対的に下から上に押し上げる力が勝りますよね?それが揚力なのです。
(なんで翼の上を流れる流体の方が翼の下を流れる流体よりも速度が遅くなるのか疑問に思われる方はKutta-Joukowskiの定理を調べてみてください。)
更に進んで、圧力差がどんな感じで生じているかに興味がある方もいると思いますので、下図に圧力分布を付け加えた図を添付しておきます。興味がある方はじっくり眺めてみてください。(緑線:圧力の等高線。赤線:各位置に働く相対圧力。赤線で囲まれた面積の分だけ揚力が発生する。)
ロケットは垂直に推力を発生させているため、重力や空気抵抗などのすべての力を押し切って上に進まなければなりませんが、飛行機は水平に移動することによって生じる圧力差を利用し、推力の十数倍もの揚力を獲得して大気中を飛行しているというわけなんですね。ですから、飛行機の方がより小さい力で大気中を飛行することができ、したがってペイロードも、ロケットより多く積載することができるというわけです。
さて、これで少しは揚力が発生する原因を理解していただけたでしょうか?揚力が発生する原因をきちんと説明するのは非常に難しいのですが、「流体の速度と圧力には何か関係がある」ということだけでもわかっていただけたなら幸いです。揚力をはじめ、飛行機に関してもっと学びたいという方は、航空宇宙工学科向けに開講されている「航空機力学第一~三」や「空気力学第一~三」などを履修してみてください。
┈┉┅━┅┉┈
#3 人工衛星 ~宇宙での移動~
┈┉┅━┅┉┈
今まで、ロケットでペイロードを運ぶのがいかに大変か(#1)、そして飛行機がどのようにして揚力を発生させているのか(#2)について説明してきましたが、この章では人工衛星がどのようにして目的の軌道へ移行するのかについて話していきたいと思います。
「え!?普通に速度を変えて目的の軌道に行けばいいのでは?」
そう思う方もいるかと思いますがそう簡単にはいかないんですよ。宇宙では、高速道路のようにまず80km/hで走行して、そして同じ車線にいながら100km/hまで加速するようなことはできないんです。
下の図を見てみてください。これは、人工衛星が地球の周りを円軌道で周回している様子を表したものです。
この速度の式に着目していただきたいのですが、速度vと周回円軌道半径rとの間に関係があることがわかります。つまり、人工衛星が円軌道をとる場合、「速度が決まったら軌道半径が決まり、逆に軌道半径が決まったら速度が決まる」のです。ですので、同じ軌道上にずっといながら、同じ軌道上の別の人工衛星を追い抜くということは絶対に起こり得ないんです。
「え?じゃあ、人工衛星やロケットは国際宇宙ステーションにどうやってドッキングさせているの?」と思う方もいるかもしれません。これから少し別の話を混ぜながらその問題について説明していくことにしましょう。

まず、先の問題を説明するために必要となる楕円軌道についてお話ししましょう。
楕円軌道は先ほどの円軌道と異なって、軌道の各地点での速度が同じになるわけではありません。楕円軌道では下図のように、中心天体に一番近い点(近心点)で速度が最大となり(v1)、中心天体に一番遠い点(遠心点)で速度が最小となります(v2)。これが楕円軌道の特徴です。楕円軌道を説明したので、ついでに2つの重要な値についても覚えておいていただきたいです。それは長半径と短半径です。長半径とは図の通り楕円軌道の中で最も離れている2点の距離の半分の長さで、短半径は楕円の中で最も近づく2点の距離の半分です。

また、上の図から赤い円軌道から緑の円軌道に移動する場合、逆に緑の円軌道から赤い円軌道へ移動する場合は、次のようにすればよいこともわかります。
赤い円軌道→緑の円軌道
①ある点で速度を上げる(その地点が近心点になる)。
②前よりも長半径が大きい楕円軌道で移動する。
③遠心点についたら再び速度を上げる。
④緑の円軌道に移行できた!
緑の円軌道→赤い円軌道
①ある点で速度を下げる(その地点が遠心点になる)。
②前よりも長半径が小さい楕円軌道で移動する。
③近心点についたら再び速度を下げる。
④赤い円軌道に移行できた!
このように速度を変化させることによって、ある円軌道から別の円軌道へと移動することができるようになるのです。
さて最後に、人工衛星の軌道変更の仕組みが分かったところで、人工衛星と国際宇宙ステイションのドッキング方法の一例について説明しましょう。(これから話す内容は割と難しい話になってしまうかもしれませんが、その点ご理解ください。)

先ほどの議論で軌道を円軌道から別の円軌道に変更する方法について述べました。その方法を用いて国際宇宙ステーション(ISS)と同じ軌道上(円軌道とする)に人工衛星を乗せることができたとしましょう。すると、上図のようにISSと人工衛星は同じ速さで回り続けることになります。よって、このままではいくら時間をかけても人工衛星はISSとドッキングすることができないのです。
では、どのようにしたら人工衛星はISSとドッキングすることができるのでしょうか?ここでもやはり、楕円軌道が絡んできます。ここで、楕円軌道の重要な性質の1つ「地球(中心天体)に近づけば近づくほど、人工衛星やロケットの速さが速くなる」ことを思い出してください。この性質を使って以下で説明します。

なるべくわかりやすく説明するため上図のように3ステップに分けて説明していきます。
ステップ1
まずは、人工衛星の速度を減少させて、長半径の小さい楕円軌道(赤い軌道)に遷移させる。そうすると、徐々に人工衛星の速さが大きくなり、最初に比べてISSとの距離が近くなっていく。
ステップ2
今度は、また別の楕円軌道(緑の軌道)に遷移させる。このとき、地球から離れていくので人工衛星の速さは徐々に小さくなっていくが、依然としてISSの速度の大きさよりも大きい速さであれば、徐々にISSに近づいていくことができる。
ステップ3
ISSと人工衛星がちょうど同じ位置に来た時に、人工衛星の速度を増加させて、今まで通りの円軌道に人工衛星を遷移させる。ISSと人工衛星のドッキング完了!
このように、ISSと人工衛星をドッキングすることができます。実際には、真に驚くべき複雑なプロセスでドッキングがなされたり、別の方法を用いてドッキングがなされたりするのですが、この余白はその説明を書くには狭すぎる。
とにもかくにも、ここで理解しておいてほしいことは、「同じ円軌道上にある別の物体に追いつこうとしたら、一度速度を遅らせ、(ここでは説明しませんでしたが、)逆に別の物体に追いついてもらおうとしたら、一度速度を速める」必要があるということです。これは極めて直感に反することですが、宇宙ではこうした方法で2物体間の距離を縮めているんです。
人工衛星の軌道遷移のお話に興味を持ち、もっと学びたいと思った方は、航空宇宙工学科向けに開講している「宇宙工学演習」や「宇宙機制御工学」、「宇宙軌道力学」を履修してみてください。
おわりに
一口に航空宇宙工学科と言っても学ぶ範囲は多岐にわたっており、まだまだお話ししたいことが数多くありますが、今回は「ロケット・飛行機・人工衛星の飛び方の違い」に絞ってお伝えしてきました。なるべく簡単に議論しようとしたため、厳密には違うようなところも散見されますが、今回の目的は3者の違いを伝えることにあるので、そこは目を瞑っていただけると幸いです。
最後に、航空宇宙工学科で身につくこととして、全体像の把握を挙げます。「航空宇宙工学科では飛行機とか宇宙とかに関係したものしか学ばないんでしょ?」と思われる方もいるかもしれませんが、そうではありません。飛行機やロケットで使用されている材料はどういったものなのか?ちゃんと壊れないようになっているのか?なども学びますし、そもそもエンジンってどんな仕組みで作られているのか?なども学びます。
航空宇宙工学科では、このようにロケット・飛行機・人工衛星を設計したり、組み立てたりする際に必要なことを一つずつ上に積み重ねていくようにして学ぶことができるのです。最初は学問一つ一つが独立して見えますが、徐々にお互いの学問が繋がっていく様子を体感することができるのは非常に楽しいものがあります。
航空宇宙に興味のある人はもちろんのこと、幅広い知識を獲得したい人やシステム全体を俯瞰的に見る力をつけたい人にも、ぜひ航空宇宙工学科に入ってもらいたいものですね。